(21)3712640/29-11
(22)22.03.84
(46)23.04.88, Бюл. № 15
(71)Ильичевский морской торговый порт
(72)В.М.Брежнев
(53)621.86.061(088.8)
(56)Авторское свидетельство СССР № 1081111, кл. В 66 С 1/48, 1980.
(54) ТОРЦОВЫЙ ЗАХВАТ
(57)Изобретение относится к подъем-- но-транспортным устройствам, используемым на погрузочно-разгруэочных работах. Целью изобретения является повышение производительности и надежности работы. Торцовый захват содержит корпус, состоящий из щек 1, между которыми смонтирован поворотный подпружиненный подхват 3. В верхней части щек 1 корпуса размещен фиксирующий рычаг 6 для подхвата 3. Между щеками 1 расположены храповик 7 и
13 5 7
JV
20
жестко соединенньш с ним храповик 8. Храповик 7 выполнен с торцовым храповиком, взаимодействующим с неподвижным торцовым храповиком 10. На одной оси с фиксирующим рычагом 6 размещен поворотный подпружиненный рычаг 11, на котором закреплены толкатель 16 и его фиксатор 18, подпружиненные между собой. В исходном положе НИИ поворотный рычаг 11 расположен горизонтально. При натяжении стропа, связанного с поворотным рычагом 11, последний занимает положение пор горизонту. Толкатель 16 переходит на другой выступ храповика 7.Груз зажат.При его опускании на опорную поверхность ослабляется натяжение стропов. Ново- . ротный рычаг 11 опускается в горизонтальное положение. Под действием толкателя 16 храповики 7 и 8 и торцовый храповик поворачиваются, поднимая фиксирующий рычаг 6, Захват открывается. 6 ил.
11
СО
со
фиг.
Изобретение относится к подъемно транспортным устройствам,, используемым на погрузочно-разгрузочных работах, например в портах при перегрузке труб большого диаметра и листового материала, и может быть использовано для перегрузочных процессов с различными объектами в тех случаях, когда присутствие человека в зоне отстропки недопустимо или нежелательно из-за температуры, агрессивности среды и т.д.
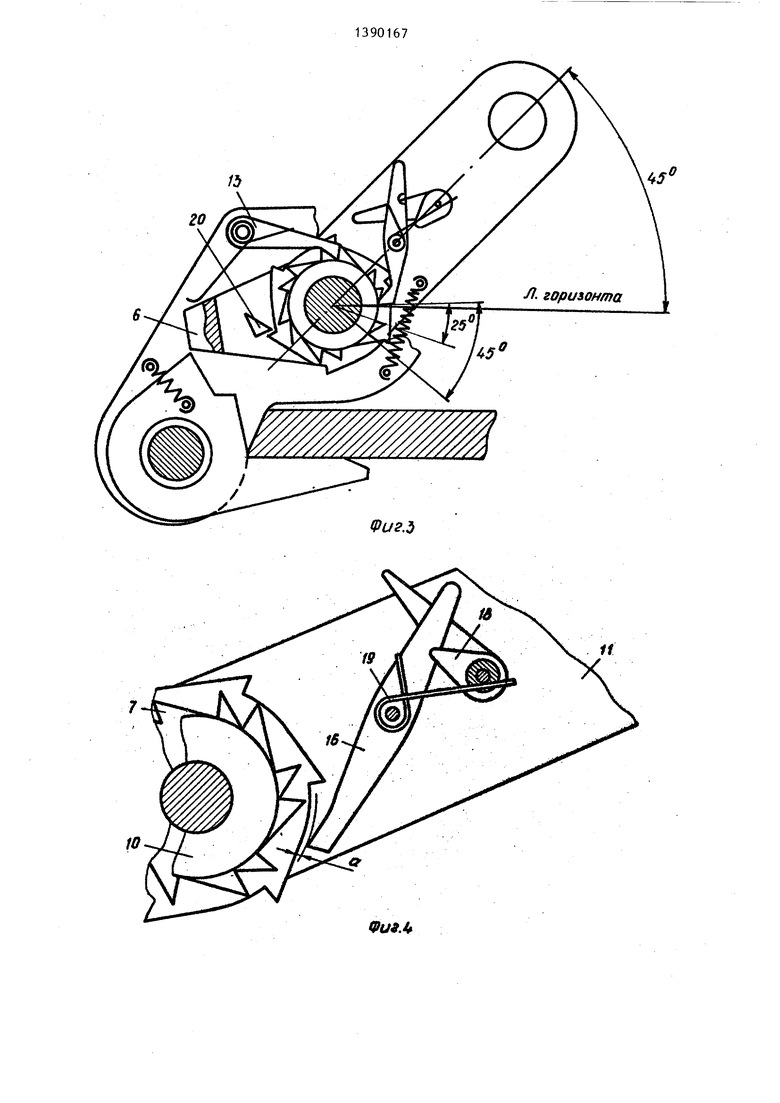
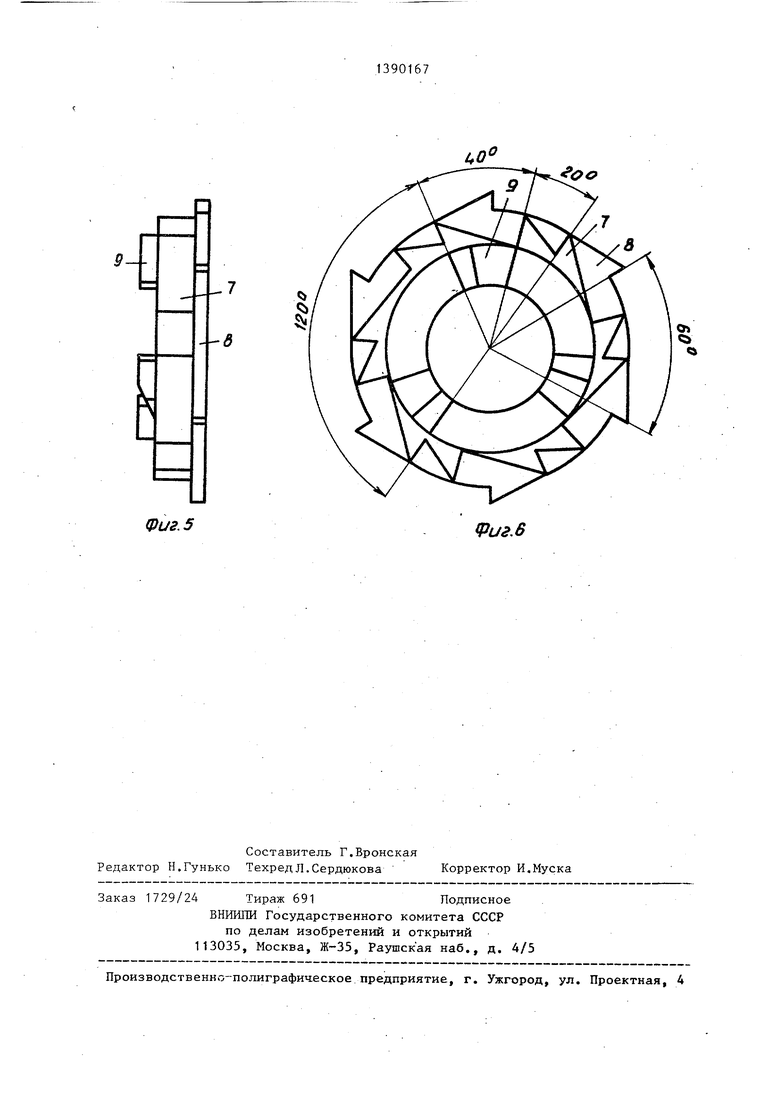
Цель изобретения - повыиение производительности и надежности работы. На фиг. 1 представлен захват, общий вид; на фиг. 2 - то же,-вид сверху на фиг. 3 - захват в момент сход с груза (захват открыт), общий вид; на фиг. 4 - захват,вид сбокуj на фиг. 5 - вид на храповики с торцовой муфтой; на фиг. 6 - то же, вид сбоку
Торцовый захват содержит состоящи из двух щек 1 корпус, внутри которого на оси 2 смонтирован подхват 3 с пружиной 4. В верхней части корпуса на оси 5 установлен выполненный из двух щек фиксирующий рычаг 6. Механизм автоматического освобождения гр за содержит храповик 7 и жестко сое- диненньш с ним храповик 8, при этом храповик 7 вьшолнен с торцовым храповиком 9, взаимодействующим с непод- вижньм торцовым храповиком 10. Торцовые храповики 9 и 10 выполнены в виде торцовых винтовых зубьев.
На оси 5 установлен поворотный рычаг 11, который подпружинен отн,о- сительно корпуса пружиной 12. На корпусе установлен фиксатор 13 для вза- имодействия с храповиком 7. При зтом фиксатор -13 и фиксирующий рычаг 6 находятся под действием пружины 14. На поворотном рычаге 11 гаарнирно закреплен на оси 15 толкатель 16, а на оси 17 - фиксатор 18 толкателя 16, при этом толкатель 16 и фиксатор 18 находятся под действием пружины 19, На фиксирующем рычаге 11 жестко закреплен упор 20, взаимодействующий с храповиком 8. Храповики 7 и 8 подпружинены в осевом направлении пружиной 21.
Торцовой захват работает следующим образом.
Захват находится в исходном положении (фиг. 1). При этом поворотный рычаг 11, соединенный с несущим стропом, находится в горизонталь
10
15
а20 ,
й, 25у- 30 3901672
ном положении (показано штрихпунктир- ной линией), т.е. произведена застро- повка груза. Кран тянет за строп, поворотный рычаг 11 поднимается и занимает положение под углом 45 (фиг, 1) , При этом толкатель 16 перескакивает на очередной выступ храповика 7, В таком положении кран поднимает и переносит груз.
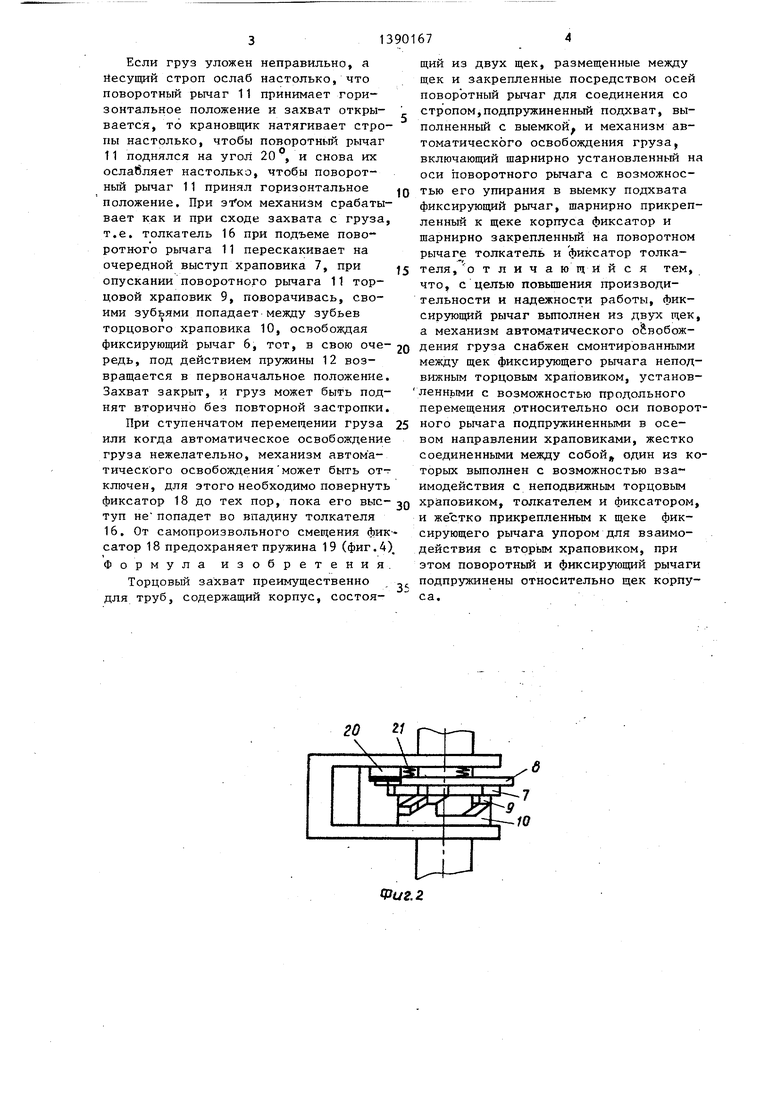
При опускании груза на опорную поверхность ослабляется натяжение стропов. Поворотньй рычаг 11 под действием собственного веса и пружины 12 опускается в горизонтальное положение. Под действием толкателя 16 храповики 7 и 8 и торцовой храповик 9 поворачиваются на угол 40 . Поворачиваясь на оси 5, торцовой храповик 9, взаимодействуя с торцовым храповиком 10, смещается -вдоль оси и зубом храповика 8 подходит под упор 20, прикрепленньш к щеке 1 фиксирующего рычага 6, поднимает его (фиг, 2 и 3), поворачивая на оси 5 на угол 15°. По окончании поворота на 40°
Граповики 7 и 8 и торцовой храповик закрепляются в таком положении фиксатором 13. Захват открыт.
Если груз уложен правильно, захваты могут быть сняты с груза, для чего кран натягивает несущие стропы, поднимает поворотньй рычаг 11 на угол 45. С ростом натяжения стропов подхват 3 начинает поворачивать35
ны 4 до тех пор, пока не сойдет с груза (фиг. 3). При подъеме рычага 11 толкатель 16 вновь перескакивает на очередной выступ храповика 7,
При сходе с груза подхват 3 под действием пружины 4 возвращается в первоначальное положение. Одновремен- но рычаг 11 под действием пружины 12 поворачивается относительно корпуса проворачива.я одновременно храповик 7. Проворачиваясь вместе с храповиком 7, торцовой храповик 9 своими торцовыми зубьями попадает во впадины торцового храповика 10, смещается под действием пружин 21, освобождая упор 20 фиксирующего рычага 6 (фиг. 2). Фиксирующий рычаг 6 под действием пружины 14 возвращается в первоначальное положение, фиксируя подхват 3. Захват готов для повторной застроп ки груза. При этом храповики 7 и 8 и торцовой храповик 9, повернувшись на 20, закрепляются фиксатором.
Если груз уложен неправильно, а йесущий строп ослаб настолько, что поворотный рычаг 11 принимает горизонтальное положение и захват открывается, то крановщик натягивает стропы настолько, чтобы поворотный рычаг 11 поднялся на угол 20°, и снова их ославляет настолько, чтобы поворотный рычаг 11 принял горизонтальное положение. При эт ом механизм срабатывает как и при сходе захвата с груза, т.е. толкатель 16 при подъеме поворотного рычага 11 перескакивает на очередной выступ храповика 7, при опускании поворотного рычага 11 торцовой храповик 9, поворачивась, своими зубьями попадает между зубьев торцового храповика 10, освобождая фиксирующий рычаг 6, тот, в свою очередь, под действием пружины 12 возвращается в первоначальное положение. Захват закрыт, и груз может быть поднят вторично без повторной застропки.
При ступенчатом перемещении груза или когда автоматическое освобождение груза нежелательно, механизм автоматического освобождения может быть отключен, для этого необходимо повернуть фиксатор 18 до тех пор, пока его выступ не попадет во впадину толкателя 16. От самопроизвольного смещения фик сатор 18 предохраняет пружина 19 (фиг.4) Формула изобретения.
Торцовый захват преимущественно для труб, содержащий корпус, состоя0
5
0
5
0
5
щий из двух щек, размещенные между щек и закрепленные посредством осей поворотный рычаг для соединения со стропом,подпружиненный подхват, выполненный с выемкой и механизм автоматического освобождения груза, включающий шарнирно установленный на оси поворотного рычага с возможностью его упирания в выемку подхвата фиксирующий рычаг, шарнирно прикрепленный к щеке корпуса фиксатор и шарнирно закрепленный на поворотном рычаге толкатель и фиксатор толкателя, отличающийся тем, что, с целью повышения производительности и надежности работы, фиксирующий рычаг вьтолнен из двух щек, а механизм автоматического о вобож- дения груза снабжен смонтированными между щек фиксирующего рычага неподвижным торцовым храповиком, установ- леннь ми с возможностью продольного перемещения .относительно оси поворотного рычага подпружиненными в осевом направлении храповиками, жестко Соединенными между собой, один из которых вьтолнен с возможностью вза имодействия с неподвижным торцовым храповиком, толкателем и фиксатором, и жестко прикрепленным к щеке фиксирующего рычага упором для взаимодействия с вторым храповиком, при этом поворотный и фиксирующий рычаги подпружинены относительно щек корпуса.,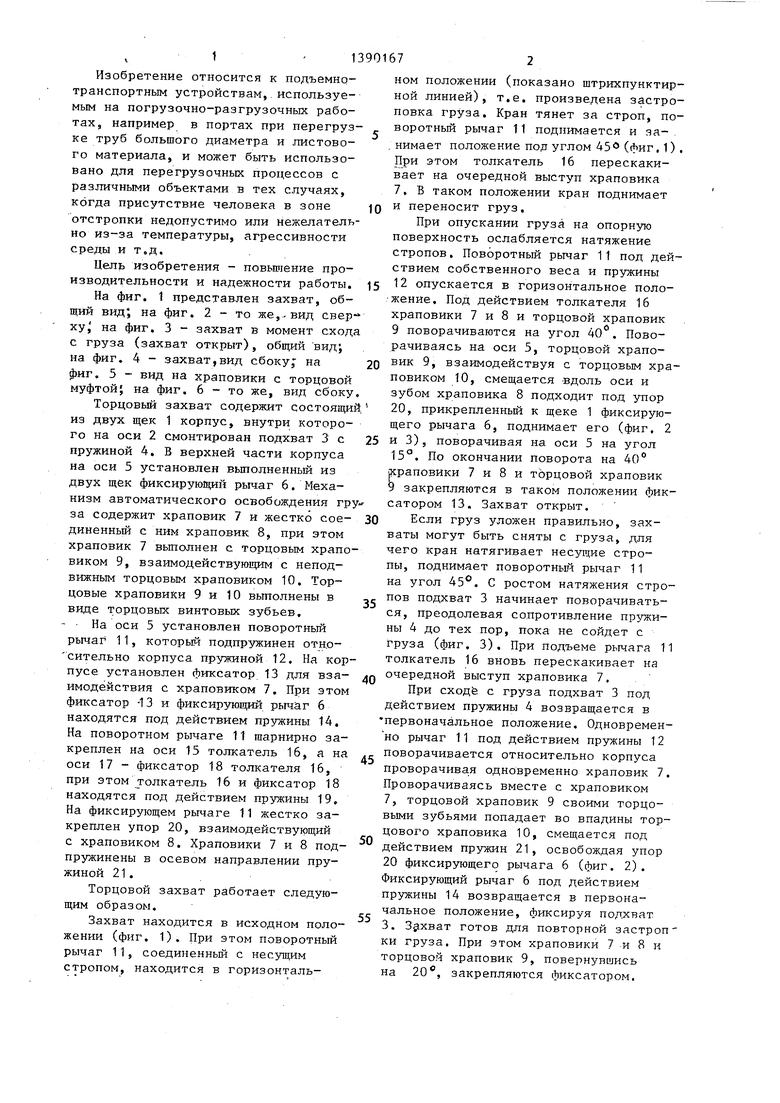
| название | год | авторы | номер документа |
|---|---|---|---|
| Торцевой захват | 1980 |
|
SU1081111A1 |
| Устройство для захвата и сброса груза со строповочным элементом | 1988 |
|
SU1625807A1 |
| Самоотцепляющееся захватное устройство | 1987 |
|
SU1495263A1 |
| Грузозахватное устройство | 1975 |
|
SU543606A2 |
| Саморасцепляющееся захватное устройство | 1983 |
|
SU1100215A1 |
| Захватное устройство для раскрывающейся тары | 1988 |
|
SU1654226A1 |
| Грузозахватное устройство | 1989 |
|
SU1687556A1 |
| Штыревое строповое устройство | 1982 |
|
SU1025642A2 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Захватное устройство | 1982 |
|
SU1105445A1 |

H--J
чзиг.2
20
Фиг.5
11
9и9Л
9
б
Фиг. 5
oo
Фиг, 6
