СлЭ
со
ел
СО со
11
Изобретение относится к астротех- иике и может быть применение при управлении телескопами.
Цель изобретения - повышение быстродействия и расширение диапазона рабочих углов системы.
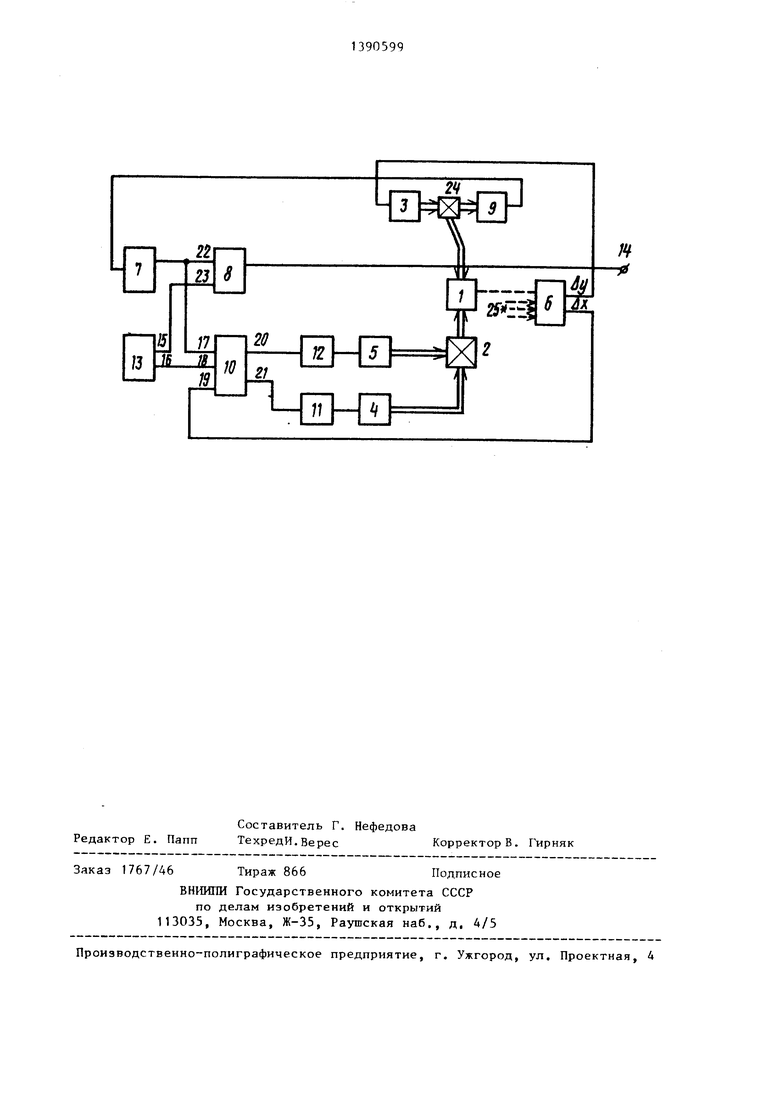
На чертеже представлена функциональная схема системы.
Система содержит телескоп 1, например, на параллактической монтировке, первый редуктор 2, второй 3, первый Д и третий 5 приводы, фотоэлектрический анализатор 6, вычислительный блок 7, компаратор 8, преобразователь 9 угол-код, блок 10 умножения, второй 11 и первьй 12 преобразователи код-угол, датчик 13 констант. Выход 14 системы, выходы 15 и 16 датчика 13 констант, третий 17 второй 18 и первый 19 входы, второй 20 и первый 21 выходы блока 10 умножения, входы 22 и 23 компаратора 8, второй редуктор 24. Наблюдаемый объект - звезда 25.
Фотозлектрический анализатор 6 может быть выполнен, например, на основе полудискового модулятора с установленным за ним фотоэлектронны умножителем, выполняющим преобразов ние свет - сигнал и подключенным к выходам умножителя и модулятора блока отработки, функция которого - выделение сигнала рассогласования по координатным осям (х и д у).
Система работает следующим образом.
Свет от звезды 25 гидрирования попадает на вход фотоэлектрического анализатора 6, установленного в фокальной плоскости телескопа 1. Если изображение звезды 25 не находится на оптическом центре фотоэлектрического анализатора 6, то отклонение изображения звезды 25 от центра разлагается на две составляющие Лх и ду, совпадающие по направлен соответственно с осями t и о телескопа 1 .
Составляющая д у поступает на вх второго привода 3, который перемеп1а телескоп 1 по оси 5 в направлении уменыис ния рассогласования со скоростью, пропорциональной величине этого рассогласования. Так как линейна зона фотоэлектрического анализатора невелика и равна для полудискового модулятора 0,5 диаметра изображения зпезды, то отработка больших paccoi
ласований у, т.е. больщих этой линейной зоны, происходит с постоянной скоростью, развиваемой вторым приводом 3.
Скорость вращения телескопа 1 относительно оси t при наличии рассогласования Лх зависит от углового положения телескопа 1 по оси 8 которое измеряется преобразователем 9 угол-код, кинематически связанным с валом привода 3 и валом телескопа 1, и поступает на вход вычислительного блока 7, который рассчитывает величину sec о
Блок 10 умножения формирует на своих выходах код, определяемый выражением
X Л X
sec
.
(1)
5
-
0
5
0
5
причем ах поступает на вход 19, п - константа, поступающая с выхода 16 датчика 13 констант на вход 18, sec о поступает на вход 17.
На выход 20 поступают старшие разряды величины X, на выход 21 - млад- щие разряды. Преобразователи 12 и 11 код-аналог формируют напряжения, пропорциональные этим кодам, которые управляют соответственно приводами 5 и 4.
Вращение валов приводов 5 и 4 суммируется редуктором 2.
При малых значениях о отработка рассогласования х производится только приводом 4, на привод 5 поступает управляющее напряжение 0. При больших значениях 8 отработка рассогласования производится обоими приводами 4 и 5, причем привод 5, установленный на больщой цене оборота, отрабатывает старщие разряды кода х, а привод 4, установленный соответственно на малой цене оборота - младшие разряды кода х.
Таким образом, скорость вращения телескопа 1 по оси t прямо пропорциональна величине х.
Монтировка телескопа 1 обуславливает следующую зависимость между t - скоростью перемещения оси t и х, связанной с этим движением скоростью перемещения, измеренною в фомальной плоскости телескопа:
I sec
(2)
Учитьгоая формулу (I), получают, что добротность привода А по оси t, измеренная в фокальной плоскости телескопа 1, не зависит от sec о
Линейность характеристики привода 4 обеспечивается до некоторых зна- координаты S о , при которых привод 5 развивает максимальную скорость. При значениях быстродействие привода 4 по оси t, приведенное к фокальной плоскости телескопа 1, падает. При , оно является недостаточным для нормальной работы системы, об этом свидетельст вует сигнал на выходе 14 системы, формируемый компаратором 8, анализирующим условие
sec
sec
о
причем sec 0 поступает на вход 23 компаратора 8 с выхода 15 датчика 13 констант.
Указанные особенности позволяют повысить быстродействие системы и расширить диапазон ее рабочих углов.
Формула изобретения
Система управления телескопом, содержащая первый преобразователь код-угол, второй преобразователь код-угол, соединенный выходом с входом первого привода, вал которого
с
JQj
20
25
30
кинематически связан с первым входным валом первого редуктора, выходной вал которого кинематически связан с первым валом телескопа, второй вал которого кинематически связан с первым выходным валом второго редуктора, входной вал которого кинематически связан с валом второго привода, а второй выходной вал - с валом преобразователя угол-код, подключенного выходом к входу вычислительного блока, отличающаяся тем, что, с целью повышения быстродействия и расширения диапазона рабочих углов системы, в нее дополнительно введены третий привод, блок умножения и датчик констант, а на телескопе установлен фотоэлектрический анализатор, оптически связанный входом с наблюдаемым объектом, соединенный первым выходом с входом второго привода, а вторым выходом - с первым входом блока умножения, подключенного вторым входом к выходу датчика констант, третьим входом - к выходу вычислительного блока, первым выходом - к входу второго преобразователя код- аналог, а вторым выходом - к йходу первого преобразователя код-анйлог, соединенного выходом с входом третьего привода, вал которого кинематически связан с вторым валом первого редуктора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления телескопом | 1979 |
|
SU924671A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
| Система управления телескопом | 1979 |
|
SU826273A1 |
| Система управления телескопом | 1978 |
|
SU805251A1 |
| Система управления телескопом | 1986 |
|
SU1390600A1 |
| Устройство для управления оптическим телескопом | 1980 |
|
SU941942A1 |
| Устройство для обнаружения и коррекции гнутой трубы телескопа | 1980 |
|
SU970295A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Телескоп | 1983 |
|
SU1108379A1 |
Изобретение относится к астро- технике и может найти применение при управлении телескопами. Целью изобретения является повышение быстродействия и расширение диапазона рабочих углов системы. Поставленная цель достигается за счет изменения пропорщ - онально sec О скорости привода телескопа по оси t и поддержании тем самым постоянства добротности следящего контура по этой оси в фокальной плоскости телескопа, что позволяет существенно сократить нерабочую близпо- люсную зону. 1 ил.
| Устройство для управления телескопом при слежении за световым объектом | 1984 |
|
SU1210128A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления наведением телескопа | 1974 |
|
SU560213A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
