Изобретение относится к прецизионной измерительной технике и может быть использовано для измерения возмущающих моментов в маломоментных подвесах чувствительных элементов гироскопических приборов, например гирокомпасов с магнитным подвесом.
Цель изобретения - повышение точности измерения возмущающих моментов путем определения углового ускорения объекта, возникающего под действием этих моментов.
Блок-схема устройства изображена на чертеже.
Устройство содержит корпус 1, подвешиваемое тело 2 с электропроводным осесимметричным элементом 3 и многогранным зеркалом 4 для определения его углового положения, оптический датчик 5 угла поворота тела 2 и последовательно соединенный с ним блок 6 выставки тела 2 в исходное положение с датчиком 7 момента, обмотки которого укреплены на корпусе 1 устройства и обхватывают электропроводный осесимметричный элемент 3. На корпусе установлен электромагнит 8 магнитного подвеса с датчиком 9 вертикального перемещения объекта и системой 10 автоматического регулирования тока электромагнита. Тело 2 взвешивается магнитным подвесом за ферромагнитный ротор 11 из магнито-мягкого материала. К оптическому датчику угла 5 также подсоединены последовательно соединенные задатчик 12 угла и измеритель 13 времени его прохождения и параллельно им дополнительный второй задатчик 14 угла и измеритель 15 времени его прохождения.
К выходам измерителей времени 13 и 15 подключен вычислитель 16, определяющий возмущающий момент М по формуле
M=I
 =2
=2  , где I - момент инерции объекта;
, где I - момент инерции объекта;
Δ ϕ1, Δ ϕ2 - значения углов, определяемых первым и вторым задатчиками;
t1, t2 - величины времени прохождения углов Δ ϕ1 и Δ ϕ2 .
Между блоком 6 выставки объекта и датчиком момента 7 включен блок 17 отключения датчика момента.
Оптический датчик 5 угла может быть выполнен в виде фотоэлектрического автоколлиматора 18, схемы преобразования информации 19, измерителя 20 напряжения в аналоговом и цифровом виде. Блок 6 выставки может быть выполнен в виде квадратурного генератора 21, фазового модулятора 22 и источника 23 регулируемого напряжения. Устройство закрывается колпаком 24.
Устройство работает следующим образом. Оператор включает магнитный подвес и взвешивает тело 2 в поле электромагнита 8 за ферромагнитный ротор 11. Рабочий объем закрывается колпаком 24, из-под которого выкачивается воздух. Задавая с помощью источника 23 регулируемого напряжения момент того или иного знака и величины, оператор поворачивает взвешиваемое тело до попадания требуемой грани зеркала 4 в зону обзора датчика 5, после чего напряжение на выходе источника регулируемого напряжения устанавливается близким к нулевому и блок выставки 6 тела 2 в исходное положение на основе информации, поступающей с оптического датчика угла 5, осуществляет угловую стабилизацию тела 2 в линейной зоне датчика угла 5. Равновесное значение угла определяется по показаниям измерителя 20 напряжения и может быть изменено в зоне обзора датчика путем изменения напряжения с источника регулируемого напряжения 23. Для измерения действующего на тело момента оператор с помощью блока 17 отключения обесточивает обмотки датчика момента. В результате тело 2 поворачивается под действием измеряемого момента. Поскольку движение объекта начинается из равновесного положения, начальная скорость  мала, что способствует повышению точности измерения При повороте объекта измеритель 20 непрерывно регистрирует его угловое положение. При достижении заданного (например, ± 2000) набора цифр задатчики 12 и 14 угла выдают импульс запуска измерителей 13 и 15 времени. При достижении другого набора (0000) задатчик 12 угла выдает импульс останова измерителя 13 времени, а при достижении набора ( ± 2000) второй задатчик 13 угла выдает импульс останова измерителя 15 времени. Информация с измерителей интервалов времени поступает в вычислитель 16, выдающий на выходе значение измеряемого момента. После считывания показаний вычислителя 16 оператор при помощи блока 17 вновь подключает датчик момента 7 к блоку выставки 6 и тело 2 приводится в исходное угловое положение.
мала, что способствует повышению точности измерения При повороте объекта измеритель 20 непрерывно регистрирует его угловое положение. При достижении заданного (например, ± 2000) набора цифр задатчики 12 и 14 угла выдают импульс запуска измерителей 13 и 15 времени. При достижении другого набора (0000) задатчик 12 угла выдает импульс останова измерителя 13 времени, а при достижении набора ( ± 2000) второй задатчик 13 угла выдает импульс останова измерителя 15 времени. Информация с измерителей интервалов времени поступает в вычислитель 16, выдающий на выходе значение измеряемого момента. После считывания показаний вычислителя 16 оператор при помощи блока 17 вновь подключает датчик момента 7 к блоку выставки 6 и тело 2 приводится в исходное угловое положение.
Затем оператор, изменяя напряжение источника регулируемого напряжения 23, поворачивает тело 2 так, чтобы в зону обзора датчика 5 угла попала другая грань многогранного зеркала 4, и проводит измерение момента в новом положении тела относительно корпуса 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ УГЛОВОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 1996 |
|
RU2112926C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
| КОСМИЧЕСКИЙ ИЗМЕРИТЕЛЬ ПРИРАЩЕНИЯ СКОРОСТИ | 2012 |
|
RU2524687C2 |
| СПОСОБ КОНТРОЛЯ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ | 2011 |
|
RU2491508C1 |
Изобретение относится к прецизионной измерительной технике. Цель изобретения - повышение точности измерения возмущающих моментов путем определения углового ускорения объекта, возникающего под действием этих моментов. Устройство содержит подвешиваемое в корпусе 1 тело 2 с многогранным зеркалом 4, оптический датчик 5 угла, датчик 7 момента с обмотками, расположенными на корпусе 1, блок 6-выставки, задатчики 12 и 14 угла, измерители времени 13 и 15, вычислитель 16 и блок отключения датчика 17 момента. Предварительная выставка тела 2 осуществляется регулируемым источником 23 при включенном блоке 17 путем разворота тела 2 датчиком момента 7 относительно корпуса 1. Равновесное положение тела 2 определяется по выходному сигналу оптического датчика угла 5 в аналоговой и (или) цифровой форме. Для измерения момента блок 17 отключает обмотки датчика момента и тело начинает ускоренно вращаться под действием возмущающего момента. Задатчики угла 12 и 14, выполненные в виде цифровых компараторов, фиксируют время прохождения телом 2 заданных углов путем подачи сигналов останова на измерители 13 и 15 времени. По полученным интервалам времени вычислитель 16 на основе закона ньютона определяет ускорение тела 2 и действующий на него момент. Последовательными поворотами тела 2 при помощи включенного датчика момента измерение возмущающего момента далее может производиться в точках, соответствующих угловым положениям граней многогранного зеркала 4. 1 ил.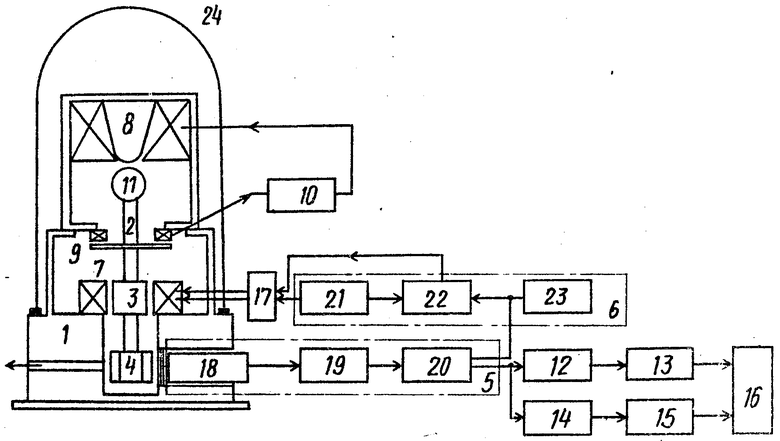
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВОЗМУЩАЮЩЕГО МОМЕНТА, действующего на подвешиваемое тело в маломоментном подвесе, например бесконтактном, содержащее оптический датчик угла, последовательно соединенный с задатчиком угла, блок выставки подвешиваемого тела в исходное положение, соединенный с оптическим датчиком угла, датчик момента и последовательно соединенные измеритель времени и вычислитель возмущающего момента по измеренному временному интервалу, отличающееся тем, что, с целью повышения точности, в него введены блок отключения датчика момента на время процесса измерения, включенный между блоком выставки и датчиком момента, последовательно соединенные второй задатчик угла и второй измеритель времени, выход которого соединен с вторым входом вычислителя возмущающего момента, а вход второго задатчика угла соединен с выходом датчика угла, при этом датчик момента выполнен в виде двух неподвижных обмоток и электропроводного осесимметричного элемента, жестко связанного с подвешиваемым телом.
| Воронков Н.Н., Кутырев В.В | |||
| и Ашимов Н.М | |||
| Гироскопическое ориентирование | |||
| М.: Недра, 1980, с.259, 286. |
