сл
со со
со
KD tsD
20 1
13 (Pu-i 1
1
Изобретение относится к переработке пластмасс, в частности к переработке пластмасс методом литья под давлением, и может быть использовано в машиностроении в целях получения полых пластмассовых деталей.
Цель изобретения - повышение надежности литьевой формы и получение поднутрений без литейного уклона.
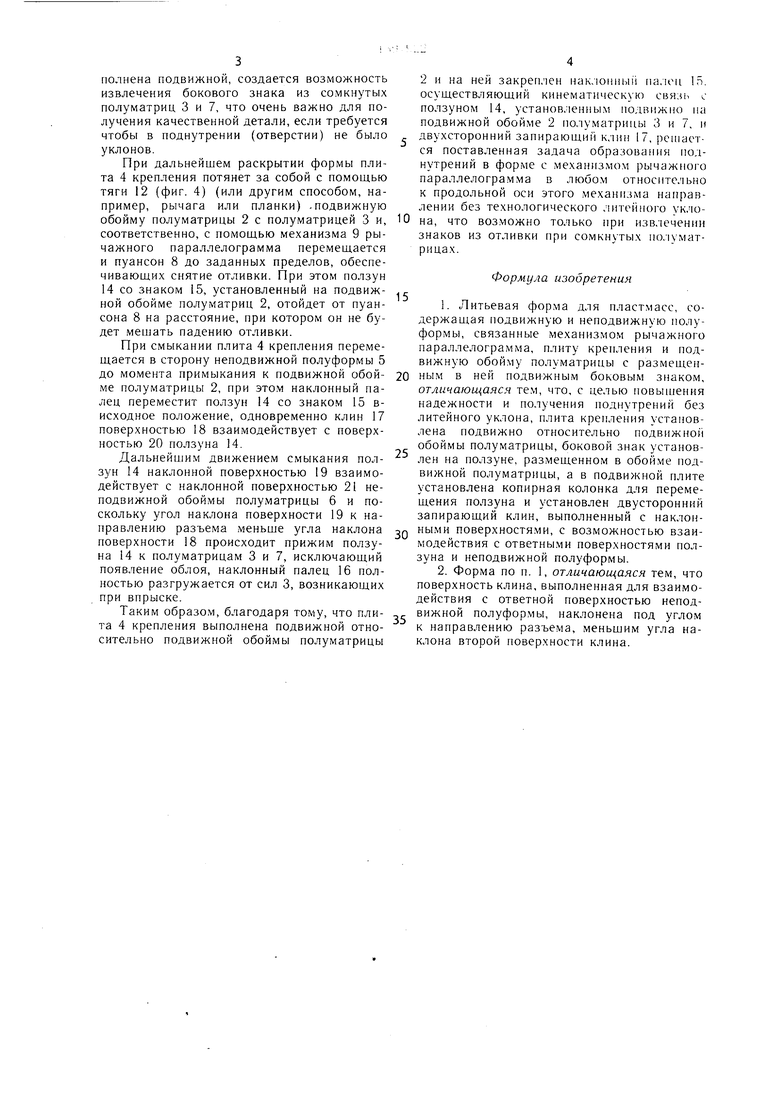
На фиг. 1 представлена форма в сомкнутом состоянии, продольный разрез; на фиг. 2 - форма в момент отхода плиты креп- ,чспия от подвижной обоймы полуматрицы, Ч1)()дольный разрез; на фиг. 3 - вид А на iT. 1; на фиг. 4 - связь плиты крепления модвижной обоймой полуматрицы.
Предлагаемая литьевая форма для пласт- .;асс содержит подвижную полуформу 1, которая включает подвижную обойму полуматриц 2, с полуматрицей 3, плиту 4 крепления, неподвижную полуформу 5, которая включает неподвижную обойму полуматриц 6 с полуматрицей 7 и вертикально располо- жеьшый пуансон 8. Обоймы полуматриц 2 и 6, а также пуансон 8 соединены между собой механизмом 9 рычажного параллело- i-рамма, представляющего собой систему рычагов 10 и И, HjapHnpno связанных с обоймами полуматриц 2 и 6 и пуансоном 8.
Плита 4 крепления установлена .виж- но относительно подвижной обоймы полуматриц 2 и может быть связана с этой обоймой либо тягой 12 (фиг. 4), либо планкой с luooM, либо рычагом, либо каким-нибудь другим способом, позволяющей плите 4 крепления перемещаться относительно обоймы 2 на заданное расстояние.
На обойме полуматриц 2 в направляющих 13 (фиг. 3) установлен ползун 14 с закрепленным в нем знаком 15. Ползун 14 кинематически связан с подвил ной плитой 4 коепления с помощью наклонного пальца 16.
.J 11..ГМС 4 крепления установлен также двухсторонний запирающий клин 17, имеющий наклонные поверхности 18 и 19 для взаимодействия с ползуном 14 и неподвижной обоймой полуматриц 6. Для этой цели ползун 14 имеет ответную наклонную- поверхность 20, а обойма 6 ответную поверхность 21.
Выполнить в известных конструкциях форм с механизмом рычажного параллелограмма такую кинематическую связь ползуна 14 с наклонным пальцем 16 было невозможно, так как это возможно только при условии, что плита 4 крепления подхвата относительно подвижной обоймы 2. Таким образом, конструктивное решение, предусматривающее исполнение формы с подвижной плитой 4 крепления в сочетании с установленным в пОлТ.вижной обойме нолуматриц 2 ползуном 14 с боковым знаком 15 и кинематической связью подвижной плиты 4 крепления с ползуном 14 с помощью наклонного пальца 16 является п.овым и существенным, причем только такое решение позволяет ре0
5
0
5
0
5
0
5
0
5
щить задачу извлечения знака при закрытых полуматрицах, что в некоторых случаях необходимо для получения качественной отливки.
Установленный в плите 4 крепления двухсторонний запирающий клин 17 позволяет разгрузить наклонный палец 16 от нагрузки, возникающей при впрыске. Наклонная поверхность 19 выполнена под углом ос к направлению разъема, меньшим угла р (фиг. 1) наклона поверхности 18.
Использование предлагаемой формы позволяет не только запереть ползун 14, но и создать определенный натяг. Размещение клина 17 в подвижной плите 4 крепления и выполнение этого клина с наклонными поверхностями 18 и 19 позволяет разместить ответную поверхность 21 неподвижной обоймы 6 так, что линия действия нагрузки Р (фиг. 1) запирания и линия действия нагрузки Q от впрыска практически совпадают и поэтому клин 17 не испытывает изгибающих моментов, а следовательно, вся система работает более устойчиво, более надежно.
Устройство работает следующим образом.
В сомкнутой форме плита 4 крепления прижата к подвижной обойме полуматриц 2, клин 17 наклонной поверхностью 18 взаимодействует е наклонной поверхностью 20 ползуна 14, удерживая ползун 14 вместе со знаком 15 в исходном положении при впрыске, при этом необходимый натяг для уменьшении отжима и предотвращения образования облоя, обеспечивает взаимодействие наклонной поверхпости 19 клина 17 с поверхностью 21 неподвижной обоймы полуматрицы 6. Благо.ааря тому, что угол а наклона поверхности 19 к направлению разъема меньше угла наклона f поверхности 18, суммарные силы от впрыска и смыкания будут направлены в сторону отливки, создавая необходимое уплотнение для предотвращения облоя. Размещение клина 17 в плите 4 крепления позволяет выполнить запирание ползуна 14 так, что линия действия сил впрыска Р и линия действия сил запирания Q совпадают, а это озпачает, что клин 17 полностью .разгружен от изгибающих нагрузок.
После впрыска и охлаждения расплава форму раскрывают. При этом на первом этапе плита 4 крепления отходит от подвижной обоймы полуматрицы 2, тогда как полуматрицы 3 и 7 остаются прижатыми друг к другу. В процессе движения плиты 4 клин 17 выходит из контакта с неподвижной обоймой полу матрицы 6 и освобождает ползун 14, а наклонный палец 16 переместит ползун И вместе со знаком и извлечет знак 15 из отливки.
Таким образом, благодаря тому, что наклонный палец 16, осуществляющий кинематическую связь с ползуном 14, установленным в подвижной обойме полуматриц 2, закреплен на плите крепления, которая вы
гюлнена подвижной, создается возможность извлечения бокового знака из сомкнутых полуматриц 3 и 7, что очень важно для получения качественной детали, если требуется чтобы в поднутрении (отверстии) не было уклонов.
При дальнейшем раскрытии формы плита 4 крепления потянет за собой с помощью тяги 12 (фиг. 4) (или другим способом, например, рычага или планки) -подвижную обойму полуматрицы 2 с полуматрицей 3 и, соответственно, с помощью механизма 9 рычажного параллелограмма перемещается и пуансон 8 до заданных пределов, обеспечивающих снятие отливки. При этом ползун 14 со знаком 15, установленный на подвижной обойме полуматриц 2, отойдет от пуансона 8 на расстояние, при котором он не будет мешать падению отливки.
При смыкании плита 4 крепления перемещается в сторону неподвижной полуформы 5 до момента примыкания к подвижной обой- ме полуматрицы 2, при этом наклонный палец переместит ползун 14 со знаком 15 в- исходное положение, одновременно клин 17 поверхностью 18 взаимодействует с поверхностью 20 ползуна 14.
Дальнейшим движением смыкания ползун 14 наклонной поверхностью 19 взаимодействует с наклонной поверхностью 21 неподвижной обоймы полуматрицы 6 и поскольку угол наклона поверхности 19 к направлению разъема меньше угла наклона поверхности 18 происходит прижим ползуна 14 к полуматрицам 3 и 7, исключающий появление облоя, наклонный палец 16 полностью разгружается от сил 3, возникающих при впрыске.
Таким образом, благодаря тому, что плита 4 крепления выполнена подвижной относительно подвижной обоймы полуматрицы
5
0
5
0
2 и на ней закреплен нак:1оииы11 палец 15. осуществляющий кинематическую свяль с ползуном 14, установленным подвижно па подвижной обойме 2 полуматрицы 3 и 7, и двухсторонний запирающий к.-щн 17, решается поставленная задача образовании поднутрений в форме с .механизмо.м рычажного параллелограмма в любом относительно к продольной оси этого .механизма направлении без технологического литейного уклона, что возможно только при извлечении знаков из отливки при сомкнутых по.:|умат- рицах.
Формула изобретения
1.Литьевая форма для пластмасс, содержащая подвижную и неподвижную полуформы, связанные механизмом рычажного параллелограмма, плиту крепления и подвижную обойму полуматрицы с размещенным в ней подвижным боковым знаком, отличающаяся те.м, что, с целью повышения надежности и получения ноднутрений без литейного уклона, плита крепления установлена подвижно относительно подвижной обоймы полуматрицы, боковой знак установлен на ползуне, размещенном в обойме подвижной полуматрицы, а в подвижной плите установлена копирная колонка для перемещения ползуна и установлен двусторонний запирающий клин, выполненный с наклонными поверхностями, с возможностью взаимодействия с ответными поверхностями ползуна и неподвижной полуформы.
2.Форма по п. 1, отличающаяся тем, что поверхность клина, выполненная для взаимодействия с ответной поверхностью неподвижной полуформы, наклонена под углом к направлению разъема, меньшим угла наклона второй поверхности клина.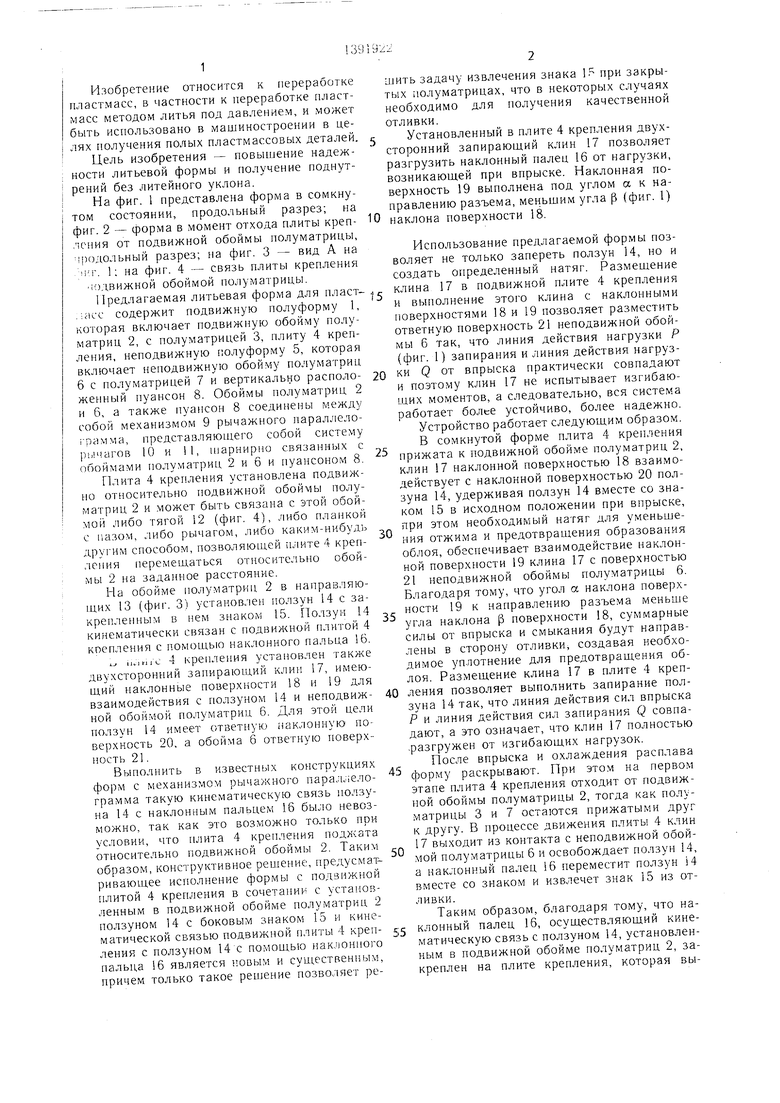
| название | год | авторы | номер документа |
|---|---|---|---|
| Литьевая форма для изготовления деталей с поднутрениями | 1984 |
|
SU1199648A1 |
| Литьевая форма для изготовления полых длинномерных полимерных изделий | 1986 |
|
SU1391919A1 |
| Литьевая форма для изготовления полимерных изделий | 1984 |
|
SU1186516A1 |
| Литьевая форма для пластмасс | 1986 |
|
SU1361002A1 |
| Литьевая форма для изготовления полых изделий | 1991 |
|
SU1794034A3 |
| Литьевая форма для изготовления полимерных изделий с поднутрениями | 1982 |
|
SU1122518A1 |
| Литьевая форма для изготовленияпОлиМЕРНыХ издЕлий C пОдНуТРЕНи-яМи | 1978 |
|
SU797882A1 |
| Литьевая форма | 1990 |
|
SU1735033A1 |
| Литьевая форма для изделий из полимерных материалов | 1989 |
|
SU1765023A1 |
| Литьевая пресс-форма | 1974 |
|
SU574897A1 |
Изобретение относится к переработке пластмасс литьем под давлением. Цель - повышение надежности работы формы и повышение качества изделий. Для этого плита 4 крепления установлена подвижно относительно подвижной обоймы полуматрицы 2. Знак 15 установлен на ползуне 14, размеп1ен- но.м в обойме подвижной полуматрицы 2. В подвижной плите 4 расположены копирная колонка 16 для перемещения ползуна и клин 17 с наклонными повер.хностями 8 и 19. Повер.хность 19 клина, взаимодействующая с неподвижной полуформой 6, наклонена под углом к направлению разъема, меньшим угла наклона повер.хности 18 клина. I з. п. ф-лы, 4 ил. (0
/7 W 20 21
0LfZ.2
Фиг.
Составитель С. Клюев
Редактор Ю. СередаТехред И. ВересКорректор А. Зимокосов
Заказ 1795/21Тираж 559Подписное
ВНИИПИ Государсгпеиного комитета СССР по делам изобретений и откоытий
I 13035, Л1осква, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое иредприятие, г. Ужгород, ул. Проектная, 4
ВидА
15
16
40
Фиг.З
| Дубов К | |||
| X | |||
| Технологическая оснастка для переработки термопластов | |||
| М.; ЦНИИТЭСтроймаш, 1983, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
