оо
со
ел
05
4
фиг
Изобретение относится к грузозахватным устройствам и может быть использовано при создании различных манипуляторов в машиностроении, в частности в автоматических металлообрабатывающих линиях для деталей типа головки цилиндра.
Цель изобретения - расширение функциональных возможностей за счет обеспечения захвата детали, поданой в зону захвата с рассогласованием оси относительно оси захватного устройства.
На фиг. 1 представлен захват манипулятора в исходном положении, вид в плане; на фиг. 2 - захват при зажиме детали, установленной на базе.
Захват манипулятора содержит приводной цилиндр 1 и связанный с ним самоцент- рируюший рычажный механизм, состоящий из соединенных со штоком цилиндра 1 тяговых рычагов 2 и шарнирно соединенных с ними рычагов 3, несущих зажимные элементы 4 а/тя крепления обрабатываемой детали 5. Рычаги 3 связаны общей опорой, выполненной в виде штанги 6, концы которой шарнирно связаны с каждым из рычагов 3. На штанге 6 установлен регулируемый упор 7 и пружина 8, размещенная в корпусе 9 и обеспечивающая поджим упора 7 к корпусу 9 захвата, при этом штанга 6 размещена в направляющих корпусах 9 с возможностью осевого перемещения. Захват работает следующим образом.
Движением щтока цилиндра 1 в рабочее положение (влево по чертежу), зажимные элементы 4 перемещаются в направлении зажимаемой детали 5, ось симметрии которой смещена относительно оси симметрии захвата (упор 7 при этом поджат к кор- 5 пусу 9, как показано на фиг. 1). В момент касания детали 5 одним из зажимных элементов 4 соответствующий рычаг 3 останавливается и далее происходит перемещение штанги б в направляющих корпуса 9 до полного зажима детали 5 элементами 4. При этом пружина 8 сжимается и между упором 7 и корпусом 9 образуется зазор.
Таким образом, происходит самоустановка захвата по зажимаемой детали 5.
После снятия детали 5 с баз приспособ- 15 ления (не показано) щтанга 6 возвращается в исходное положение и упор 7 поджимается к корпусу 9.
Установка упора 7 должна обеспечить компенсацию любой ожидаемой неточности положения детали на базах и регулировку
20
25
30
исходного положения рычагов 3. Формула изобретения
Захват манипулятора, содержащий цилиндр, опору с установленными на ней рычагами и зажимными элементами, отличающийся тем, что, с целью расщирения функциональных возможностей, опора выполие- на в виде размещенной в направляющих подпружиненной штанги с упором, причем концы штанги шарнирно связаны с каждым из рычагов.
исходного положения рычагов 3. Формула изобретения
Захват манипулятора, содержащий цилиндр, опору с установленными на ней рычагами и зажимными элементами, отличающийся тем, что, с целью расщирения функциональных возможностей, опора выполие- на в виде размещенной в направляющих подпружиненной штанги с упором, причем концы штанги шарнирно связаны с каждым из рычагов.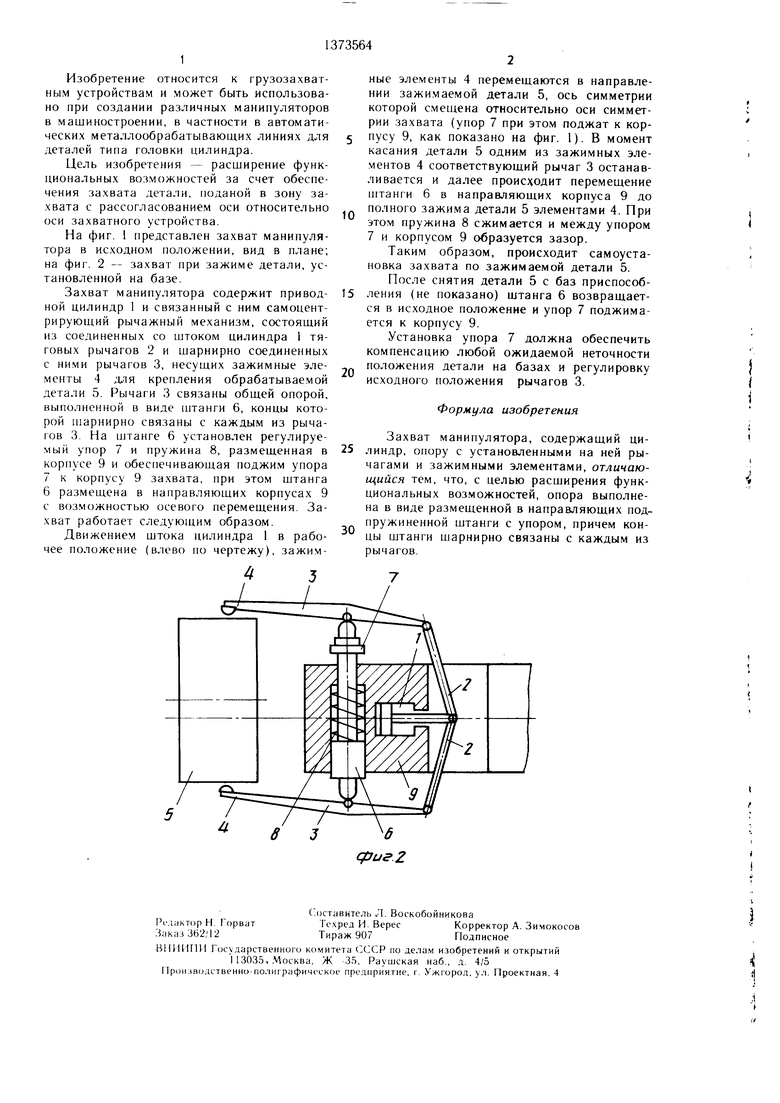
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1987 |
|
SU1537523A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Захват манипулятора | 1984 |
|
SU1333573A1 |
| Устройство для перемещения груза | 1982 |
|
SU1066909A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| САМОЦЕНТРИРУЮЩЕЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1994 |
|
RU2088396C1 |
| Зажимное устройство | 1984 |
|
SU1256900A1 |
| Захват манипулятора | 1979 |
|
SU837859A1 |
| Самоцентрирующий многокулачковый патрон | 1982 |
|
SU1065100A1 |
| Захват манипулятора | 1986 |
|
SU1380935A1 |
Изобретение относится к грузозахватным устройствам и может быть использовано при создании различных манинулято- ров в машиностроении, в частности в автоматических металлообрабатывающих линиях для деталей типа головки цилиндра. Цель изобретения - расширение функцио- наль) возможностей за счет обеспечения захвата детали, поданной в зону захвата с paccor. iacoEiaHHeM осей захвата и детали. Движением штока цилиндра 1 в рабочее положение зажимные ълемеит,: 4 перемешаются в направлении зажимаемой дега. 1и 5, ось симметрии которой смешена отно1.-ц- тельно оси симметрии за.хвата па величин) б (упор 7 при этом ноджат к корпусу ). В момент касания детали о одним из зажимных элементов 4 соответсгвуюпхш ы- чаг 3 останавливается, и да. 1е( происходит перемеп1ение штанги 6 в на11ранляюп1их корпуса 9 до полного зажима дета,-1и 5 мле ментами 4. При этом пружина 8 сжимается и между упором 7 и корпусом 9 образуется зазор а. Таким образом, происходит самоустановка захвата но зажимаемой дста. гп 5. После снятия детали 5 с баз приспособ,Ч - ния (не представлено) штапга 6 B()3np:iina ется в исходное положение и упор 7 поджи мается к корпусу 9. Установка пора 7 до, 1ж- на обеспечить компенсацию лн)Г)о11 ожидаемой неточности положения дсч.мп па базах и регулировку исходно о 1;о.|оженим |1мч,ч гов 3. 2 ил. (С (Л с:
| Захват промышленного робота | 1976 |
|
SU567600A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
