Изобретение относится к машиностроению и может быть использовано в манипуляторах с регулируемым уси лием захвата об1зектов. Известен охват промьпотеиного ро та, содержащий губки, одна из кото рых состоит из двух частей, подвиж ной и неподвижной, связанных между собой упругими элементами, и снабжена датчиком положения ее подвижной части 1. Однако известная конструкция не обеспечивает раздельной фиксации губок захвата, что ограничивает ег технологические возможности. Целью изобретения является расширение его технологических возмо-ж ностей. Поставленная цель достигается тем, что в схвате промышленного ро та , содержащем губки, одна из кото рых состоит из двух частей, подвиж ной и неподвижной, связанных между собой упругими элементами, и снабжена датчиком положения ее подвижн части, каждая губка выполнена из двух частей, подвижной и неподвижной, связанных между собой упругим элементами, и снабжена датчиком положения подвижной части и гидрав лическим приводом ее перемещения,, имеющим электрореологическую рабочую жидкость, при этом в губке выполнен канал для подачи рабочей жидкости, один из участков которог образован подвижной и неподвижной частями губки, а датчик положения подвижной части губки выполнен в виде конденсатора, пластины которо закреплены на подвижной части губк ,и на стенке канала. На чертеже изображен схват пром ленного робота. Схват содержит губки 1, каждая из которых выполнена из двух частей неподвижной 2 и подвижной 3, связан ных между собой упругими элементами 4. Каждая губка снабжена гидравлическим приводом 5 ее перемещения с электрореологической рабочей жидкос тью. В каждой губке выполнен канал б для подачи рабочей жидкости, соед ненный трубопроводами 7 с гидравлическим приводом. Один из участков канала 6 образован подвижной и непо вижной частями губки. Каждая губка снабжена датчиком положения ее подвижной части, выполненным в виде конденсатора, .одна пластина 8 котор го закреплена на стенке канала, а другая 9 - на подвижной части губки Схват работает следующим образом. Система управления приводами перемещения губок подает на пластин 8 и 9 конденсаторов высокое напряже Ние и включает насосную станцию (не показана. По трубопроводам электрореологическую жидкость подают в канал б, затем она попадает в трубопровод 7 и далее в гидравлический привод 5 губок 1. При этом привод воздействует на часть 2 губки, вследствие чего губка начинает смещаться. При взаимодействии подвижной части 3 губки 1 с захватываемым объектом происходит смещение подвижной части 3 относительно неподвижной части 2, что приводит-к деформации.упругого элемента 4, уменьшению зазора между пластинами и к возрастанию напряженности электрического поля между пластинами 8 и 9 конденсатора. Электрореологическая жидкость, находящаяся в канале 6, на участке, образованном пластинами конденсатора, затвердевает, вследствие чего расход ее в привод губки 1 прекращается и губка не перемещается. После этого весь расход электрореологической жлдкости поступает к приводам других губок, вызывaяJ их ускоренное перемещение до тех пор, пока они также не коснутся захватываемого объекта, при этом повторится описанный процесс и все губки остановятся. Весь расход насосной станции при неподвижных губках поступает на слив. После того, как все губки остановятся, сила зажима захватываемого объекта может быть изменена. Для этого системой управления изменяется напряжение на плстинах конденсаторов. Понижение напряжения вызовет необходимость дополнительного смеще ния подвижных пластин 9 конденсаторов для восстановления такой напряжённости электрического поля между пластинами конденсаторов, которая вызовет затвердевание электрореологической жидкости. Необходимое смещение пластины 9 получают при дополнительном пере мещении губок, смещении подвижных частей 3 и дополнительном сжатии упругих элементов 4, которые действуют на захваченный объект с большей силой. При дожиме система управления приводом отключает насос, снимает напряжение с пластин 8 и 9 конденсаторов , электрореологическая жидкость в участках каналов 6, образованных пластинами конденсаторов, вновь переходит в жидкое состояние. После этого приводы возвращаются в исходное положение, вытесняя через подводящие трубопроводы 7 и каналы б находящуюся в них электрореологическую жидкость на слив, воздейстэУч т на корпусы губок; оаскоывая захват. Предлагаемое устройство обеспечивает раздельную фиксацию губок, что
j10935454
снижает требования к точности пози- расширяется область его испольэовационирования захвата по отношению ния, и, следовательно, функциональк захватыйаемому объекту, поэтому ные возможности.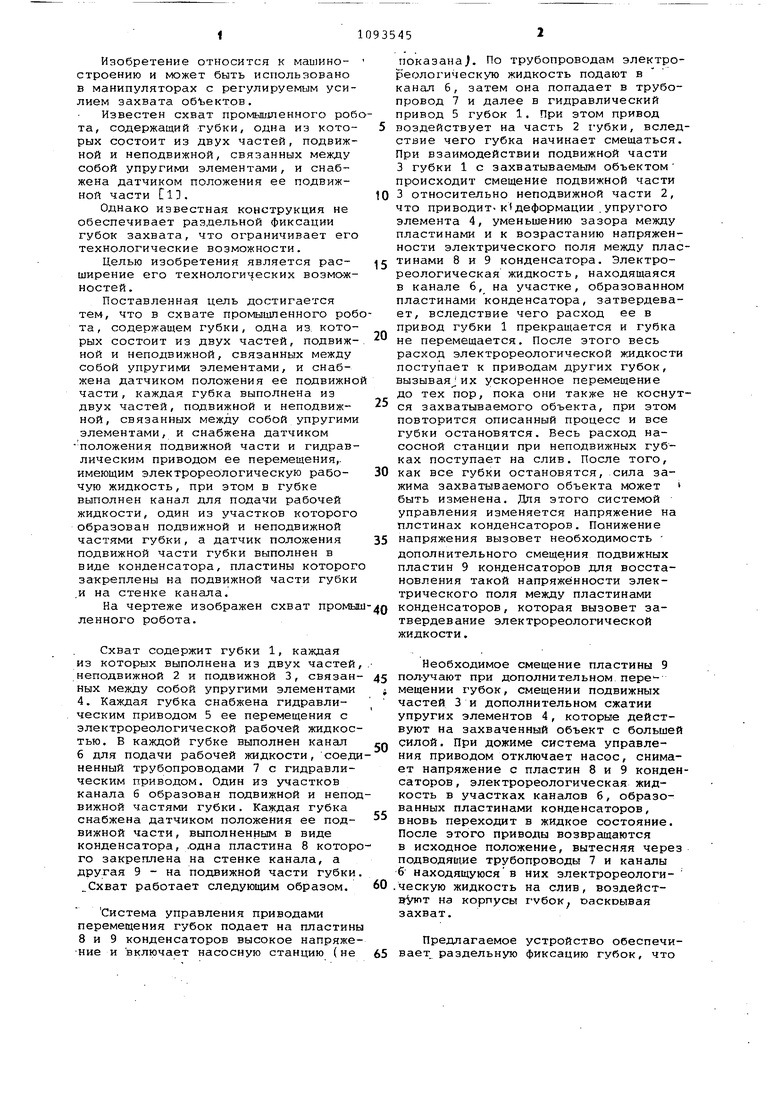
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1983 |
|
SU1085810A1 |
| Схват промышленного робота | 1986 |
|
SU1315307A2 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Схват промышленного робота | 1990 |
|
SU1798188A1 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| Схват микроманипулятора | 1981 |
|
SU1009756A1 |
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
| Схват робота | 1986 |
|
SU1445949A1 |
| Амортизатор | 1983 |
|
SU1147875A1 |
| Схват манипулятора (его варианты) | 1983 |
|
SU1229035A1 |
СХВАТ ПРОМЫШЛЕННОГО РОБОТА, содержащий губки, одна из которых состоит из двух частей, подвижной и неподвижной, связанных между собой упругими элементами, и снабжена датчиком положения ее подвижной части, отличающийся тем. что, с целью расширения его технологических возможностей путем обеспечения раздельной фиксации губок, каждая губка выполнена из двух частей, подвижной и неподвижной, связанных между собой упругими элементами, и снабжена датчиком положения подвижной части и гидравличесКИМ приводом ее перемещения, имеющим электрореологическую рабочую жидкость, при этом в губке выполнен канал для подачи этой рабочей жидкости, один из участков которого Образован подвижной и неподвижной частями губок, а датчик положения подвижной части губки выполнен в виде конденсатора, пластины которого закреплены на подвижной части (Л ,губки и на стенке канала. СО 00 сд 4 ел
