со со
со со
со
Фиг.2
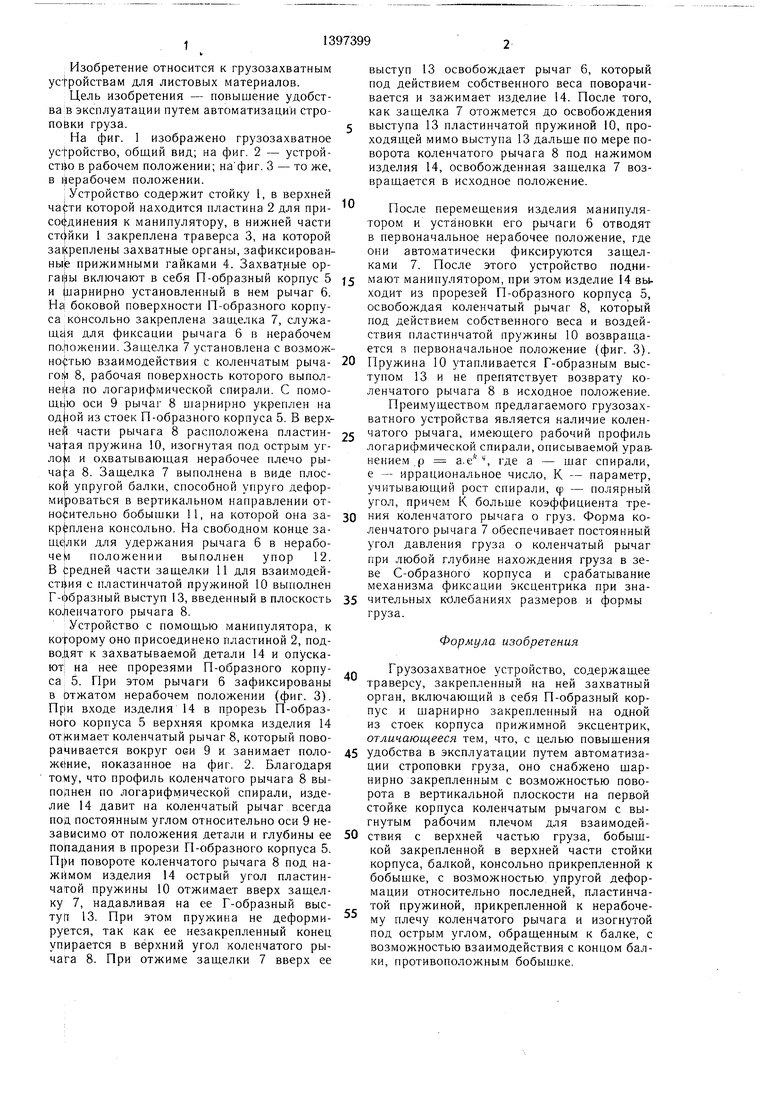
Изобретение относится к грузозахватным yctpoHCTBaM для листовых материалов.
Цель изобретения - повышение удобства в эксплуатации путем автоматизации строповки груза.
На фиг. 1 изображено грузозахватное yctpoftcTBO, общий вид; на фиг. 2 - устрой- CTijo в рабочем положении; на фиг. 3 - то же, в нерабочем положении.
; Устройство содержит стойку 1, в верхней ча||;ти которой находится пластина 2 для при- со(||динения к манипулятору, в нижней части стойки 1 закреплена траверса 3, на которой закреплены захватные органы, зафиксирован- ны прижимными гайками 4. Захватные ор- гафы включают в себя П-образный корпус 5 и (царнирно установленный в нем рычаг 6. На боковой поверхности П-образного корпуса консольно закреплена защелка 7, служащая для фиксации рычага 6 в нерабочем по.|1оже11ии. Защелка 7 установлена с возмож- но({;тью взаимодействия с коленчатым рыча- 8, рабочая поверхность которого выпол- Heijfa по логарифмической спирали. С помо- Ш.ЦЮ оси 9 рычаг 8 шарнирно укреплен на одйой из стоек П-образного корпуса 5. В верх- Heifi части рычага 8 расположена пластин- ча--ая пружина 10, изогнутая под острым углом и охватывающая нерабочее плечо рычага 8. Защелка 7 выполнена в виде плос- Koii упругой балки, способной упруго дефор- ми{)оваться в вертикальном направлении от- но ительно бобыщки 11, на которой она за- кр| плена консольно. На свободном конце за- щфки для удержания рычага 6 в нерабочей положении выполнен упор 12. В Средней части защелки 11 для взаимодей- с пластинчатой пружиной 10 BMnOviHeH Г-(| бразный выступ 13, введенный в плоскость ко.Ьенчатого рычага 8.
Устройство с помощью манипулятора, к KofopoMy оно присоединено пластиной 2, подводят к захватываемой детали 14 и опускают; на нее прорезями П-образного корпуса 5. При этом рычаги 6 зафиксированы в Отжатом нерабочем положении (фиг. 3). При входе изделия 14 в прорезь П-образного корпуса 5 верхняя кромка изделия 14 отжимает коленчатый рычаг 8, который поворачивается вокруг оси 9 и занимает поло- жс(ние, показанное на фиг. 2. Благодаря тому, что профиль коленчатого рычага 8 вы- поднен по логарифмической спирали, изделие 14 давит на коленчатый рычаг всегда под постоянным углом относительно оси 9 независимо от положения детали и глубины ее попадания в прорези П-образного корпуса 5. При повороте коленчатого рычага 8 под нажимом изделия 14 острый угол пластинчатой пружины 10 отжимает вверх защелку 7, надавливая на ее Г-образный выступ 13. При этом пружина не деформируется, так как ее незакрепленный конец упирается в верхний угол коленчатого рычага 8. При отжиме защелки 7 вверх ее
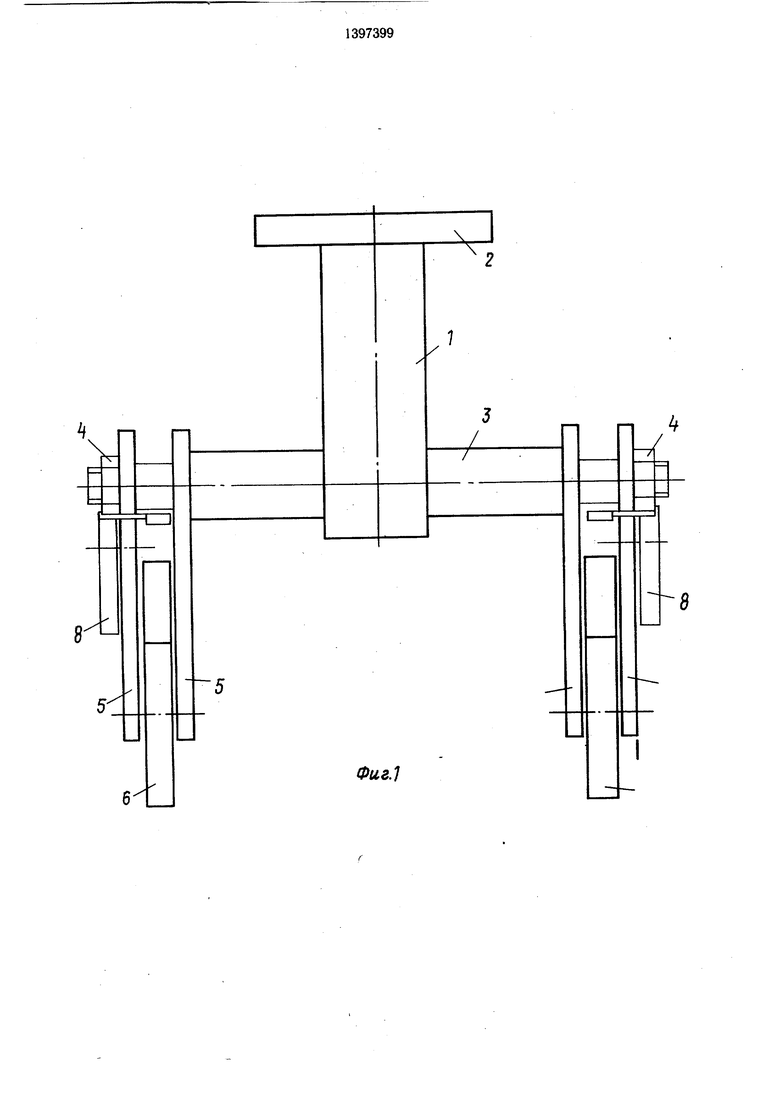
выступ 13 освобождает рычаг 6, который под действием собственного веса поворачивается и зажимает изделие 14. После того, как защелка 7 отожмется до освобождения 5 выступа 13 пластинчатой пружиной 10, проходящей мимо выступа 13 дальще по мере поворота коленчатого рычага 8 под нажимом изделия 14, освобожденная защелка 7 возвращается в исходное положение.
После перемещения изделия манипулятором и установки его рычаги 6 отводят в первоначальное нерабочее положение, где они автоматически фиксируются защелками 7. После этого устройство подни 5 мают манипулятором, при этом изделие 14 вь ходит из прорезей П-образного корпуса 5, освобождая коленчатый рычаг 8, который под действием собственного веса и воздействия пластинчатой пружины 10 возвращается н первоначальное положение (фиг. 3).
20 Пружина 10 утапливается Г-образным выступом 13 и не препятствует возврату коленчатого рычага 8 в исходное положение. Преимуществом предлагаемого грузозахватного устройства является наличие колен25 чатого рычага, имеющего рабочий профиль логарифмической спирали, описываемой уравнением .р а., где а - щаг спирали, е - иррациональное число, К - параметр, учитывающий рост спирали, ф - полярный угол, причем К больше коэффициента тре30 НИИ коленчатого рычага о груз. Форма коленчатого рычага 7 обеспечивает постоянный угол давления груза о коленчатый рычаг при любой глубине нахождения груза в зеве С-образного корпуса и срабатывание механизма фиксации эксцентрика при зна35 чительных колебаниях размеров и формы груза.
Формула изобретения
- Грузозахватное устройство, содержащее траверсу, закрепленный на ней захватный орган, включающий и себя П-образный корпус и щарнирно закрепленный на одной из стоек корпуса прижимной эксцентрик, отличающееся тем, что, с целью повыщения 45 удобства в эксплуатации путем автоматизации строповки груза, оно снабжено щарнирно закрепленным с возможностью поворота в вертикальной плоскости на первой стойке корпуса коленчатым рычагом с выгнутым рабочим плечом для взаимодей- 50 ствия с верхней частью груза, бобыщ- кой закрепленной в верхней части стойки корпуса, балкой, консольно прикрепленной к бобыщке, с возможностью упругой деформации относительно последней, пластинчатой пружиной, прикрепленной к нерабоче55
му плечу коленчатого рычага и изогнутой под острым углом, обращенным к балке, с возможностью взаимодействия с концом балки, противоположным бобыщке.
му плечу коленчатого рычага и изогнутой под острым углом, обращенным к балке, с возможностью взаимодействия с концом балки, противоположным бобыщке.
г
/
/
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство для грузов с проушинами | 1983 |
|
SU1164192A1 |
| Захватное устройство для грузов с цапфами | 1985 |
|
SU1316972A1 |
| ГРУЗОПОДЪЕМНАЯ ТРАВЕРСА ДЛЯ КРУПНОРАЗМЕРНЫХГРУЗОВ | 1966 |
|
SU183353A1 |
| Захватное устройство | 1989 |
|
SU1726351A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захват-кантователь для колонн | 1982 |
|
SU1071568A1 |
| Ручной вакуумный захват | 1975 |
|
SU658065A1 |
| Грузозахватная траверса | 1978 |
|
SU765186A1 |
| Устройство для захвата слоя штучных изделий | 1986 |
|
SU1382803A1 |
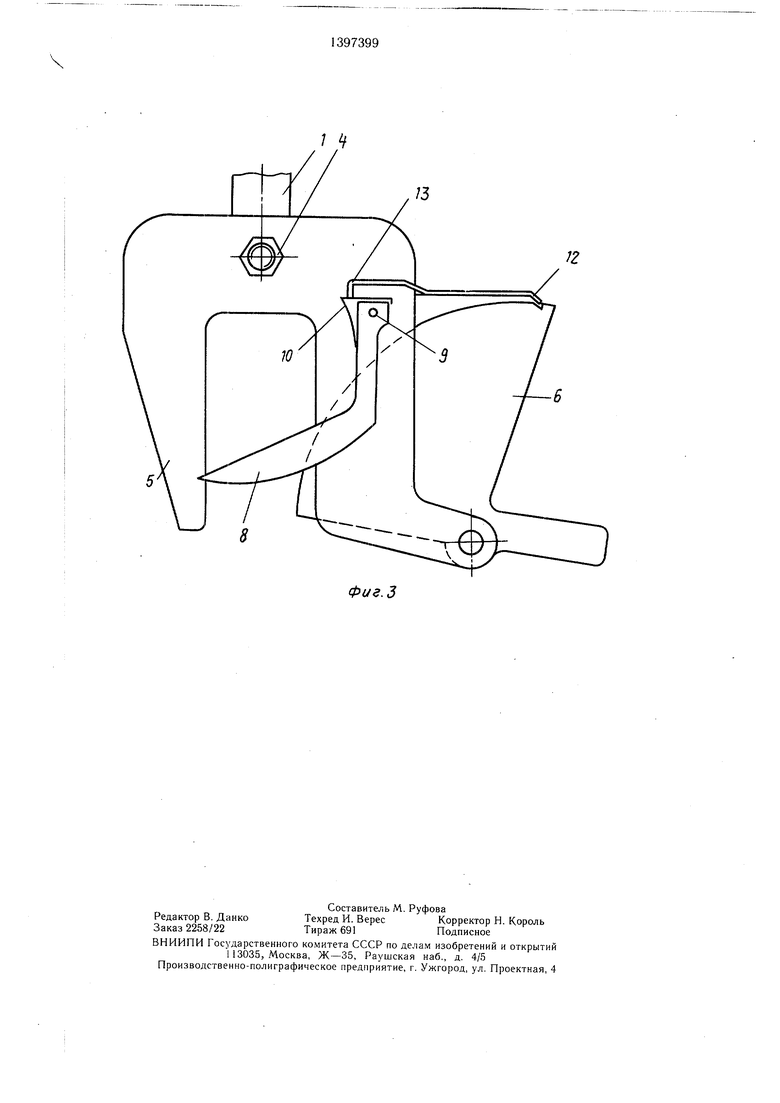
Изобретение относится к грузозахватным устройствам для листовых материалов. Цель изобретения - повышение удобства в эксплуатации путем автоматизации строповки груза. Устройство содержит стойку 1, траверсу 3, на которой закреплены захватные органы, включающие в себя П-образный корпус 5 и шарнирно установленный в нем рычаг 6. На боковой поверхности П-об- разного корпуса консольно закреплена защелка 7, служащая для фиксации рычага 6 в нерабочем положении, и шарнирно закреплен коленчатый рычаг 8, в верхней части которого закреплена пластинчатая пружина 10. Защелка 7 выполнена в виде плоской упругой балки, способной упруго деформироваться относительно бобышки 11. При входе изделия 14 в прорезь П-образного корпуса 5 верхняя кромка изделия 14 отжимает коленчатый рычаг 8, который поворачивается вокруг оси 9. При этом пластинчатая пружина 10 отжимает вверх защелку 7, надавливая на ее Г-образный выступ 13, и освобождает рычаг 6, который под действием собственной массы поворачивается и зажимает изделие 14. После транспортировки изделия рычаги 6 отводят в первоначальное нерабочее положение, где они фиксируются защелками 7, и изделие освобождают от захвата. 3 ил. I сл CZ
Фиг.1
IZ
Фиг.З
| Захват для листовых материалов | 1959 |
|
SU130174A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
