00 со
Изобретение относится к машиностроению и может быть использовано для перемещения цилиндрических деталей .
Цель изобретения - повышение надености работы,
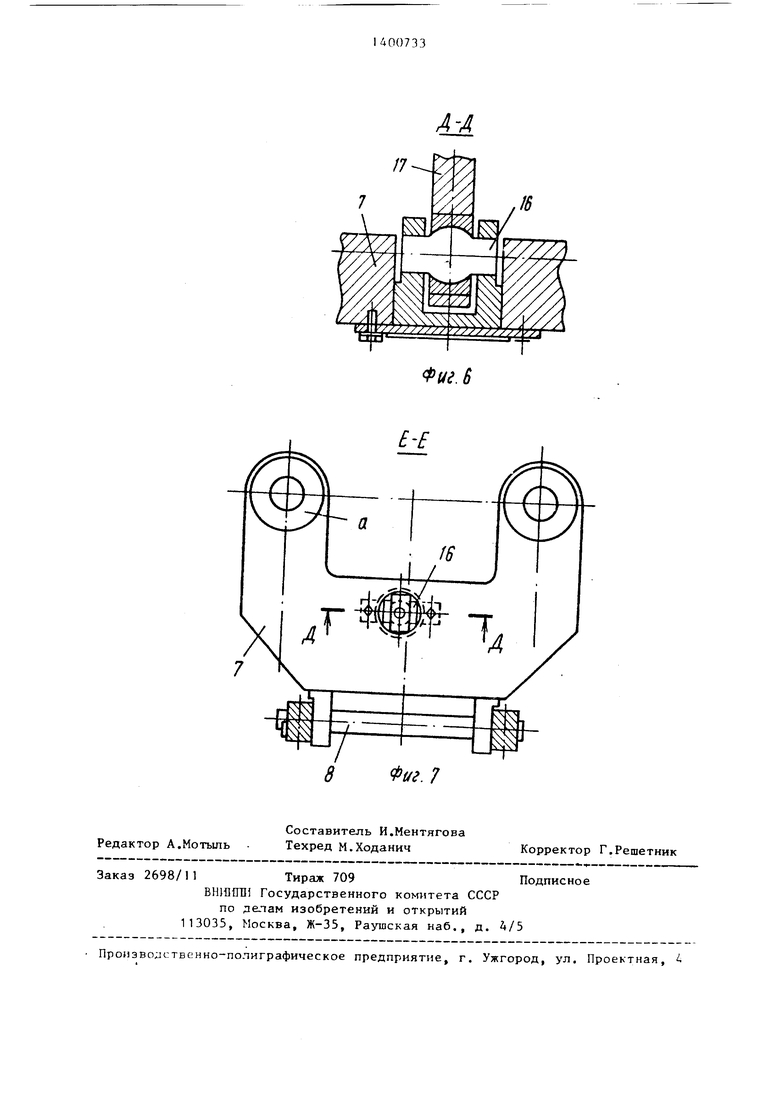
На фиг.1 изображено устройство дл перемещения цилиндрических деталей; на фиг.2 -вид А на фиг.1; на фиг.З - вид Б на фиг.1; на фиг.А -- разрез В-В на фиг.2; на фиг.З - разрез Г-Г на фиг.2; на фиг.6 - разрез Д-Д на фиг.7; на фиг. 7 - разрез Е-Е на фиг.1.
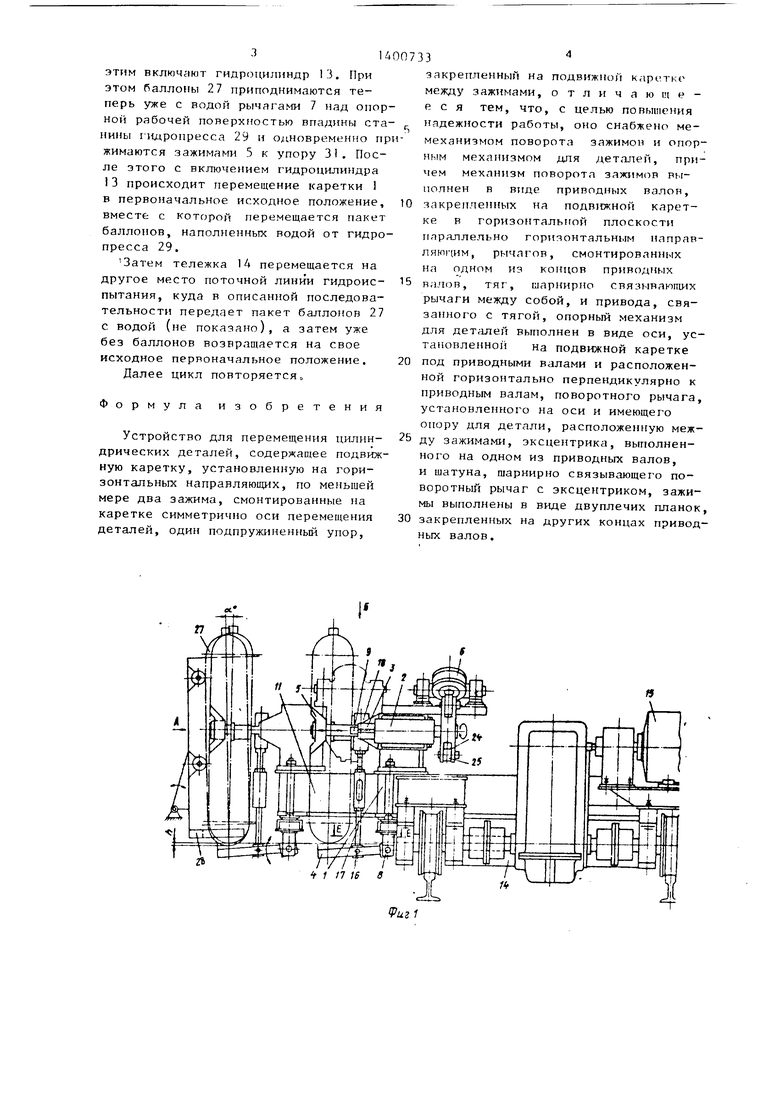
Устройство содержит подвижную каретку с опорой 2, механизм 3 попорота, опорный механизм 4, зажимы 5, припод 6 поворота. Опорньщ механизм выполнен Б виде рычагов 7 с onopat-m CL,установленных на осях 8, соедш1ен- ных посредством траверсы 9 с опорой 2. Подвижная каретка 1 установлена в направляющих 10 и 11 и связана со штоком 12 гидроцилиндра 13 (фиг.2), Направляющие 10 и 11 и пздроцидтпндр 13 размещены на тележке 14 с приводом 15 ее перемещения (фиг.2).
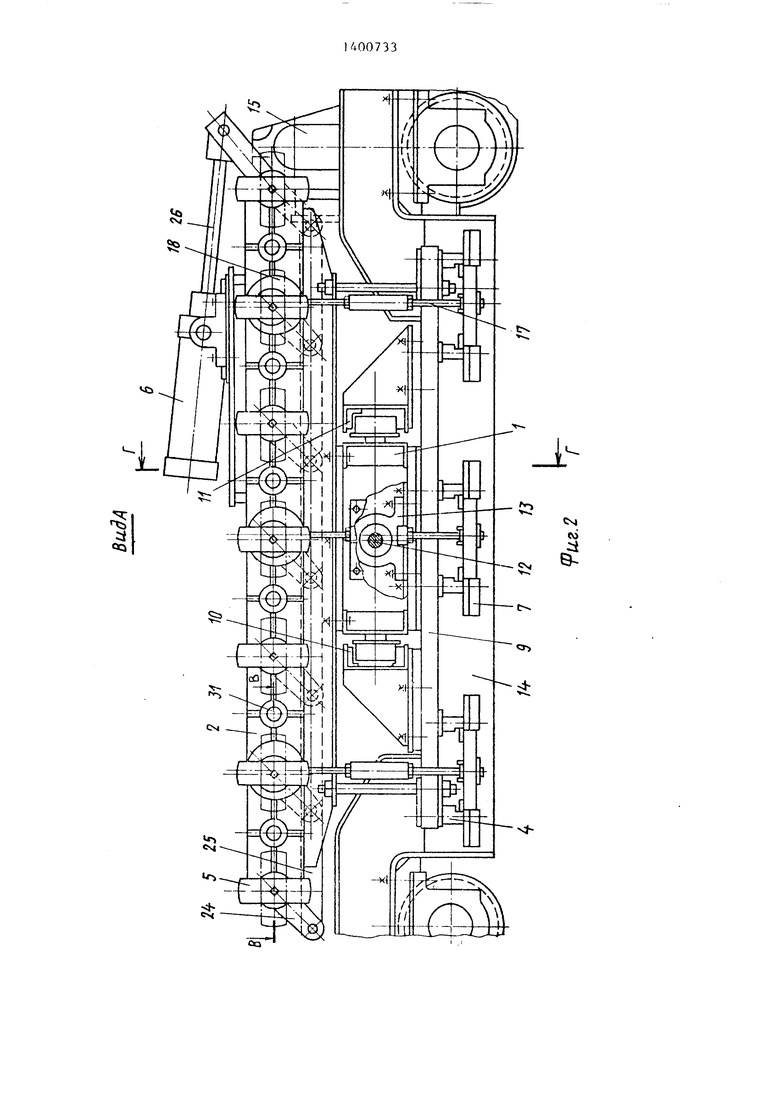
На рычаг ах 7 закреплены оси 16, связанные посредством тяги 17 с шатуном 18, установленным на подшипниках 19, Б опоре 2 смонтирован вал 20 при помощи подшипников 21 и 22. Зажим 5 выполнен в виле двуплечих планок, имеющргх форму конических призм, закрепленных на концах валов 20 и 23. На концах валов 20 и 23 за- креплены рычаги 24, которые шарнирно связаны с тягой 25, Последняя связа- на со штоком 26 привода 6, установленного на опоре 2. Устройство може применяться для перемещения пакета баллонов 27 с накопителем 28 на гидропресс 29, На вапах 20 выполнены эксцентрики 30. Подшипники 19 установлены на эксцентриках 30. Между зажимами 5 на подвижной каретке 1 смонтированы подпружиненные упоры 31
Устройство работает следующим образом.
Включают гидроцилиндр 13 через шток 12, перемещают подвижную каретк к накопителю 28. Опоры d рычагов 7 останавливаются под дном соответствущего баллона 27, находящегося на накопителе 28. После этого с включение привода 6 осу1дествляется поворот зажимов 5 вокруг оси валов 20 и 23 и
Q Q
0
5
одновременно с этим осуществляется подъем опор CL за счет поворота рычагов 7 вокруг оси 8. При этом происходит отрыв дна баллонов 27 от опор- пой поверхности накопителя 28 и од- новремнно смещение каждого баллона 27 зажимами 5 к упорам 31.
Затем вновь включают гидроцилиндр 13 на обратный ход штока 12. Каретка 1 возвращается в свое исходное положение, а вместе с ней перемещается пакет баллонов 27, стоящих в опорах а горловиной вверх. Перемещение происходит поперек оси перемещения тележки 14. С окончанием полного обратного хода штока 12 прием пакета баллонов 27 от накопителя 28 заканчивается. После этого осуществляется передача пакета баллонов теперь уже тележкой 14 на рабочие опорные поверх-. ности (не показаны) станины гидропресса 29. Это осуществляется таким образом, что включается привод 15 на перемещение тележки 14 с пакетом баллонов 27,
При этом тележка 14, перемещаясь, останавливается по команде датчиков напротив основания гидропресса 29. Ось каждой опоры а устанавливается напротив соответствующей оси паза (не показан) станины гидропресса 29.i Затем вновь включается гидроцилиндр 13. Рычаги 7 с установленными в них баллонами 27 перемещаются впередо При этом каждьй рычаг 7 размещенным в опоре (X балоном 27 входит во впадину (не показано) станины гидропресса 29, Рычаги 7, перемещаясь, останавливаются в тот момент, когда ось баллона, стоящего в опоре о., совместится с осью впадины станины гидропресса 29.
Далее с включением привода 6 на выдвижные штоки 26 осуществляется поворот зажимов 5 в обратную сторону вокруг валов 20 и 23 и одновременно с этим происходит опускание опор Ц, с баллонами 27 за счет обратного поворота рычагов 7 вокруг оси 8. При этом осу1цествляется отвод контактирующих рабочих поверхностей зажимов 5 с одновременной установкой дна баллона 27 на рабочую опорную поверхность станины гидропресса 29.
После окончания операции опрес- совки механизмы фиксации (не показаны) баллонов в гидропрессе 29 освобождают баллоны и одновременно с
-Ч1400733
этим включают гидр(5цилиндр 13. При этом баллоны 27 приподнимаются теперь уже с водой pычaгa fи 7 над опор- Hoii рабочей понерхностью впаднны станины гидропресса 29 и одновременно прижимаются зажимами 5 к упору 31, После этого с включением гидроцилиндра 13 происходит перемещение каретки 1 в первоначальное исходное положение, вместе с которой перемещается пакет баллонов, наполненных водой от гидропресса 29.
Затем тележка 1А перемещается на другое место поточной линии гидроиспытания, куда в описанной последовательности передает пакет баллонов 27 с водой (не показано), а затем уже без баллонов возвращается на свое исходное первоначальное положение. Далее цикл повторяется.
закрепленный на подвижной карс- ткг между зажимами, отличающееся тем, что, с целью повышения надежности работы, оно снабжено ме- механизмом поворота зажимон и опорным механизмом для деталей, причем механизм поворота зажимов выполнен в виде приводных валов,
10 закрепленных на подвижной каретке в горизоргтальной плоскости параллельно горизонтальным направ- ЛЯЮГ1ИМ, рычагов, смонтированных на одном из концов приводных
5 валов, тяг, ыарнирно связываюпшх рычаги между собой, и привода, связанного с тягой, опорный механизм для деталей выполнен в виде оси, установленной на подвижной каретке
20 под приводными валами и расположенной горизонтально перпендикулярно к приводным валам, поворотного рычага, установленного на оси и имеющего опору для детали, расположенную меж- Устройство для перемещения цилин- 25 ду зажимами, эксцентрика, выполненФормула изобретения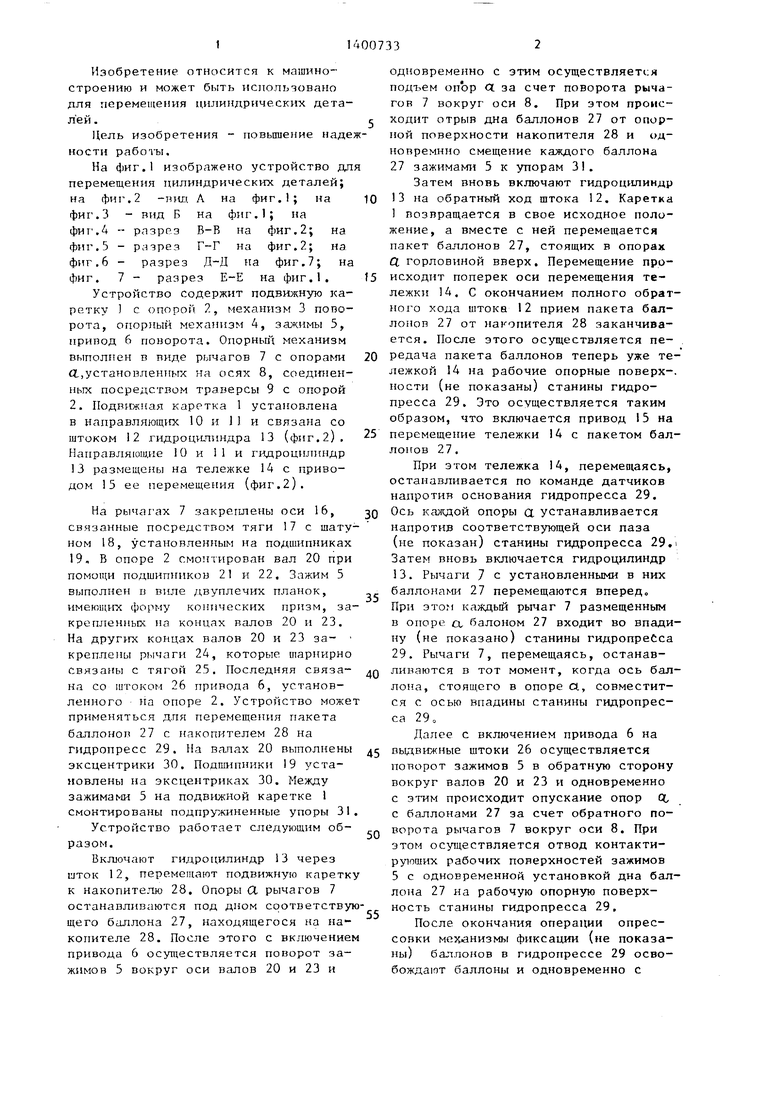
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия для сборки узлов | 1989 |
|
SU1722771A1 |
| Устройство для завинчивания деталей | 1986 |
|
SU1388259A1 |
| Установка для подачи полосы на размотку | 1990 |
|
SU1799651A1 |
| АВТОМАТ ДЛЯ РЕДУЦИРОВАНИЯ ТРУБ | 1999 |
|
RU2167729C2 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
| Устройство для формирования группы кирпичей и переноса их на вагонетку | 1982 |
|
SU1071434A1 |
| Устройство для вывинчивания подвесок | 1989 |
|
SU1703350A1 |
| Гибкая автоматизированная линия | 1988 |
|
SU1668104A1 |
| Станок для профильной заточки пил | 1979 |
|
SU803257A1 |
| ГИДРОПУЛЬСАЦИОННЫЙ ПРЕСС | 1991 |
|
RU2010658C1 |

Изобретение относится к области машиностроения и может быть использовано для перемещения цилиндрических деталей. Цель - повьшение надежности- работы. Детали перемещаются из рабочей зоны пресса на последующие позиции обработки подвижной кареткой. Детали фиксируются на подвижной каретке зажимами, вьшолнеиными в виде двуплечих планок, и опорным механизмом. Зажимы снабжены механизмом поворота. Последний выполнен в виде приводных валов, закрепленных на подвижной каретке. Приводные валы расположены в горизонтальной плоскости параллельно один относительно другого. Зажимы смонтированы на одном из концов приводных валов. На других их концах закреплены рычаги. Рычаги шарнирно связаны между собой тягой. Тяга приводится в движение от привода. На подвижной каретке смонтирован подпружиненный упор, расположенный между зажимами. Опорный механизм выполнен в виде оси, закрепленной на подвижной каретке под приводными валами. Ось расположена горизонтально перпендикулярно к приводным валам. На оси установлен поворотный рычаг, имеющий опору для деталей, расположенную между зажимами. На одном из приводных валов выполнен эксцентрик. Эксцентрик шарнирно связан с поворот- ным рычагом при помощи шатуна, 7 ил. с $ (Л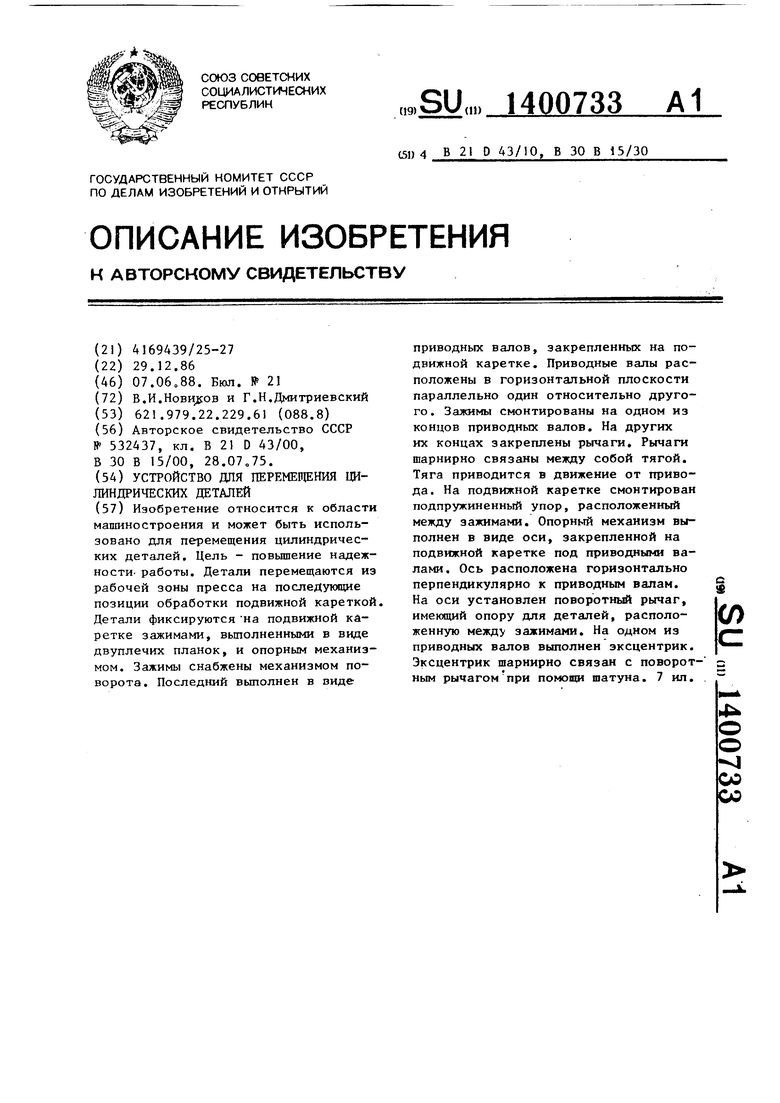
дрических деталей, содержапдее подвижную каретку, установленную на горизонтальных направляющих, по меньшей мере два зажима, смонтированные на каретке симметрично оси перемещения деталей, один подпружиненный упор.
ного на одном из приводных валов, и щатуна, шарнирно связывающего по- воротньц рычаг с эксцентриком, зажимы выполнены в виде двуплечих планок, 30 закрепленных на других концах приводных валов.
Вид 5
2
25
и
11
15
(раг.З
Л
22
г
26
fj
W
«
Риг. 5
16
Ф(/г.
Фиг.
| Устройство для захвата и перемещения штучных заготовок | 1975 |
|
SU532437A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
