(Л
4Ьр.Э
) имеет хвостовик 14, соединенный с «им шарниром 15. В нижней части хвое- Ювик 14 имеет паз 16 и сопрягается с опорным звеном 8. В верхней части Промежуточное звено 7 имеет боковые йыступы 17 и 18 трубчатой формы. CtnopHoe звено 8 имеет в нижней части у|поры, и его шарнир 22 снабжен меха- н|измом возврата с пружинами 23 круче- . Оно связано с кулачками 24, имеющими выступы 25 и 26 каждый. На. раме 1 установлен упор 27 и раймещены датчики для взаимодействия с выступами 25, что позволяет при подходе тележки к заданной перегрузочной позиции опускать стол с грузом для установки груза на опоры, отключив пред- .варительно механизм горизонтального перемещения тележки. 2 з.п. ф-лы, 14 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ СКЛАД ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU371132A1 |
| ТЕЛЕЖКА-ЗАХВАТ ДЛЯ КАНТОВАНИЯ, ПЕРЕВОЗКИ И РАЗЛИВА ЖИДКОСТИ ИЗ ГОРИЗОНТАЛЬНОЙ БОЧКИ | 1989 |
|
RU2015050C1 |
| Контейнер | 1988 |
|
SU1570965A1 |
| Устройство для перегрузки изделий | 1981 |
|
SU1022919A2 |
| ПОДВИЖНОЕ ИРРИГАЦИОННОЕ УСТРОЙСТВО | 2008 |
|
RU2404569C2 |
| ПРИСТРОЕННАЯ К СКЛАДУ СТАНЦИЯ ДЛЯ РАЗГРУЗКИ И ПОГРУЗКИ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2258023C2 |
| ЖЕЛЕЗНОДОРОЖНЫЙ ВАГОН-ПЛАТФОРМА ДЛЯ ПЕРЕВОЗКИ КОНТЕЙНЕРОВ | 2021 |
|
RU2767224C1 |
| Вагонетка воздушно-трелевочной установки | 1960 |
|
SU135505A1 |
| Устройство для перегрузки штучных грузов | 1979 |
|
SU901172A1 |
| СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ И ВЫГРУЗКИ ГРУЗОПАКЕТОВ | 1989 |
|
RU2035371C1 |
Изобретение относится к механизации погрузочно-разгрузочньтх работ, л-А например, при складировании длинномерных изделий. Цель изобретения - упрощение конструкции и повышение удобства эксплуатации. Устройство содержит размещенные по торцам рамы 1 перегрузочной тележки рычаги управления, выполненные в виде шарнирного трехзвенника, СОСТОЯЩЕГО из концевого 6, промежуточного 7 и опорного 8 звеньев. Концевое звено 6 имеет хвостовик 9 с Т-образным пазом 10, сопрягающимся с шарниром 11 концевого и промежуточного звеньев, и снабжено роликами 12 и 13. Промежуточное звено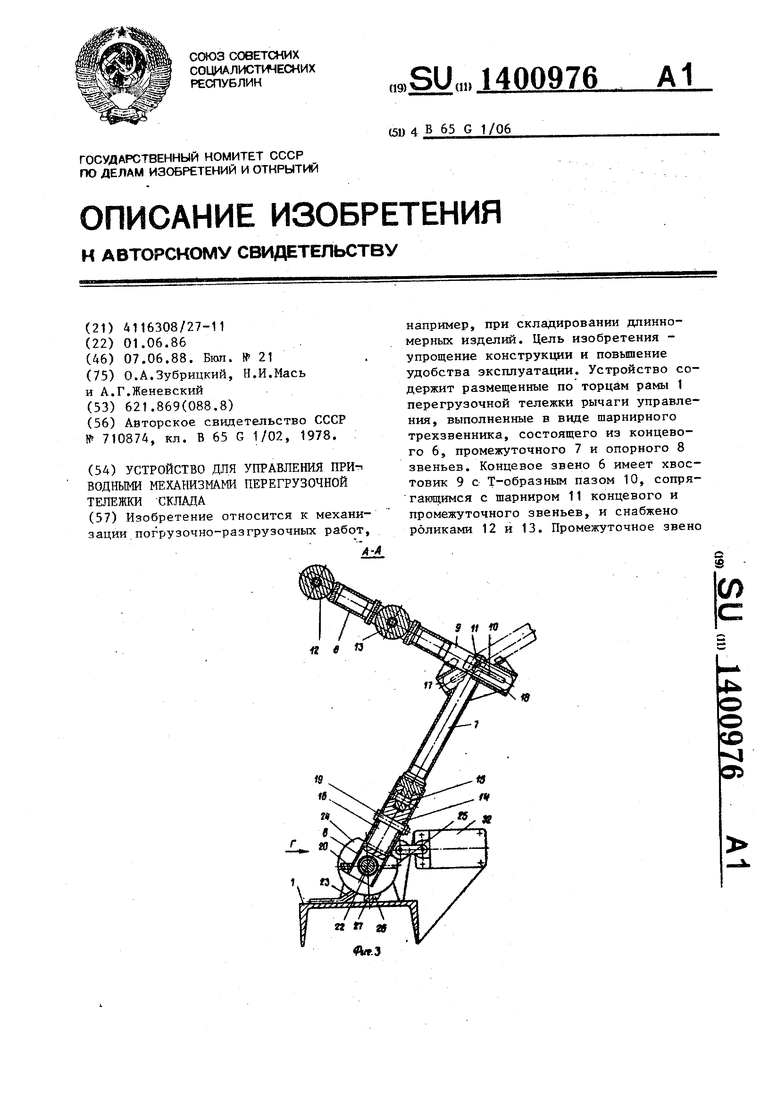
1
I Изобретение относится к механизаг. погрузочно-разгрузочных работ, например, при складировании длинно- м|врньгх изделий, в частности пачек ли- cjroBoro металла.
i Цель изобретения - упрощение конструкции и повышение удобства эксплуатации.
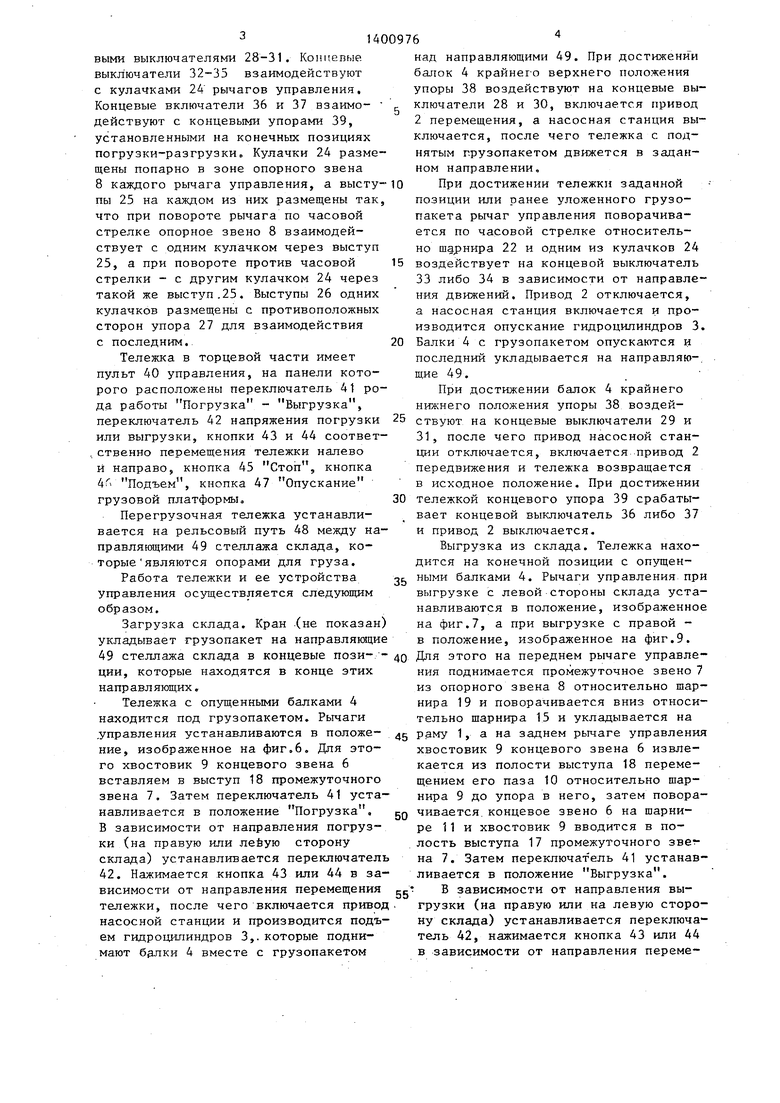
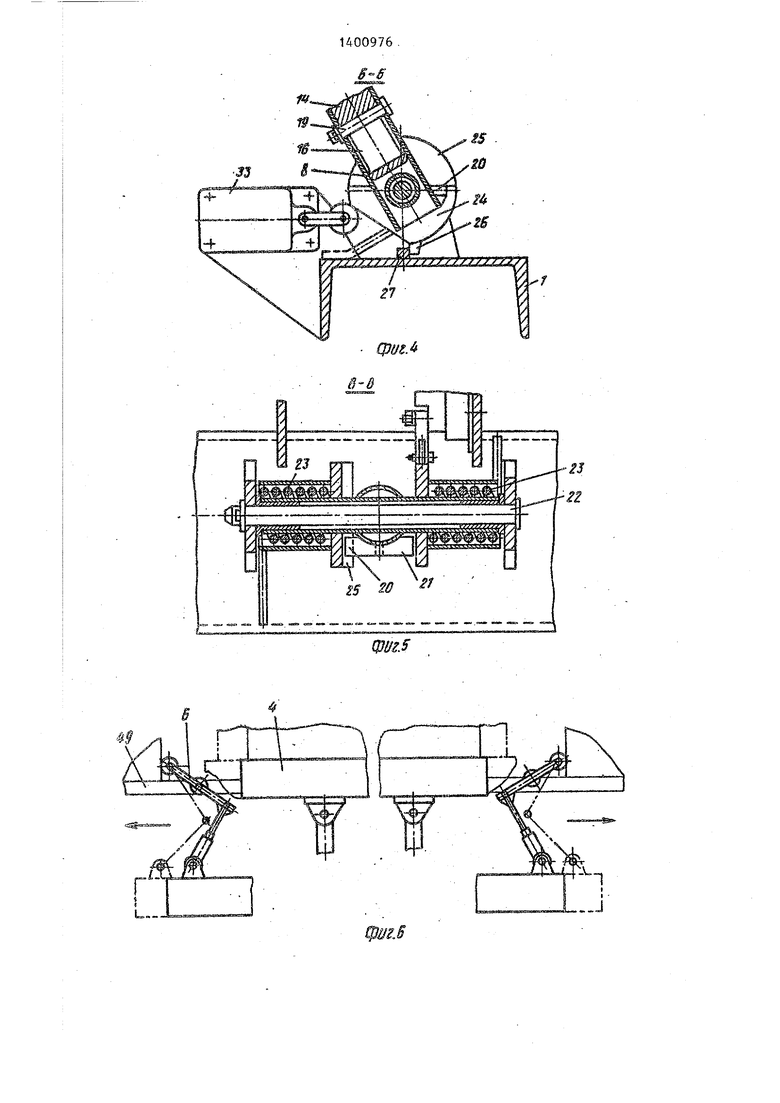
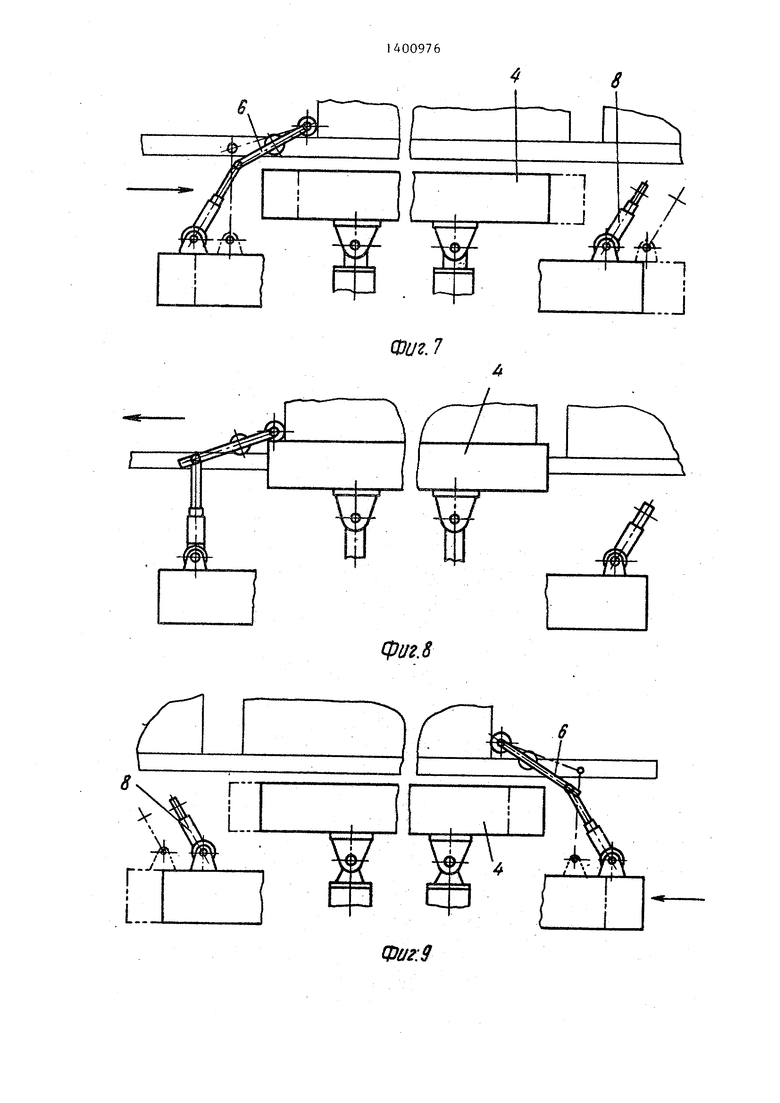
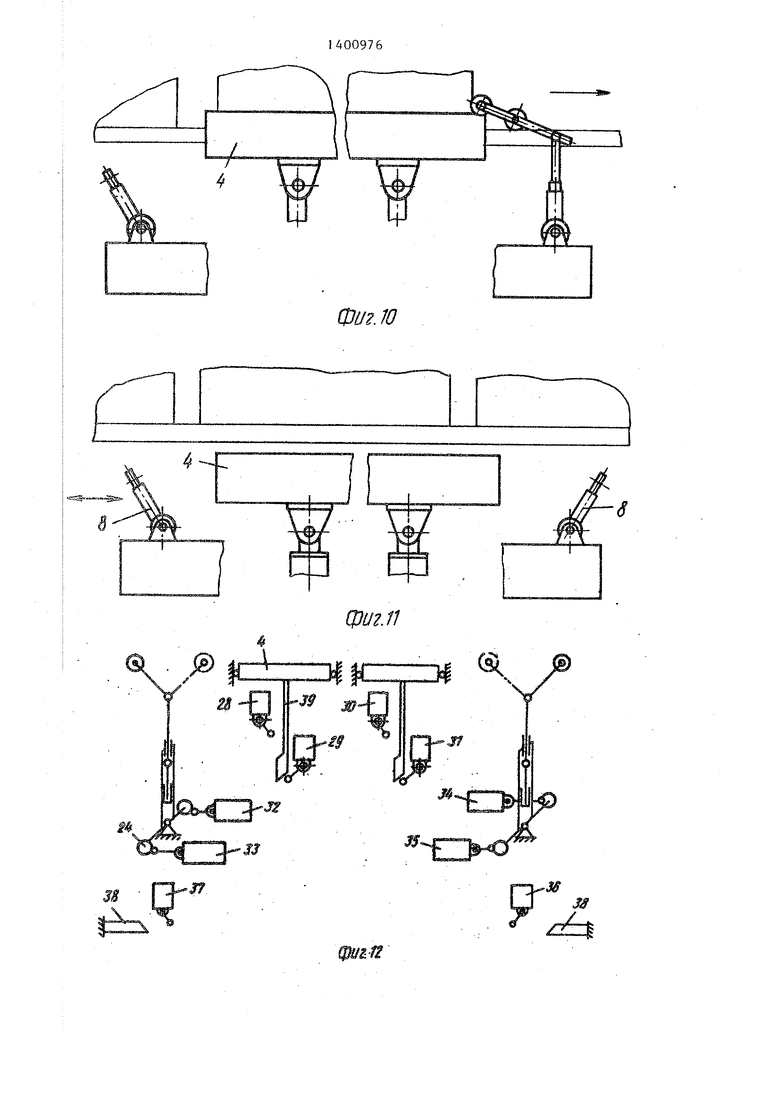
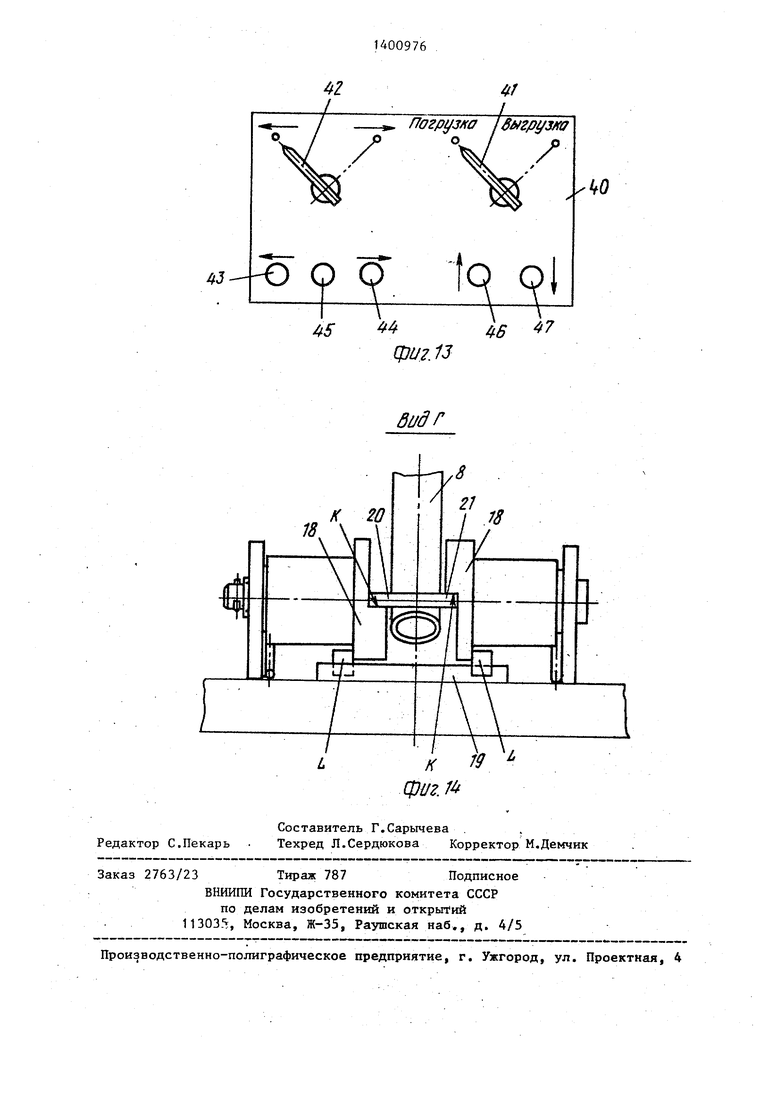
На фиг, изображена перегрузочная тележка с устройством для управления еч приводивши механизмами, вид сбоку} Hii фиг.2- то же, вид с торца, на фиг.З - разрез А-А на фиг.2; на фиг.4 р.13рез Б-Б на фиг.2 на фиг.5 - раз- риз В-В на фиг.2, на фиг.6 - положение рычагов управления и грузовой платформы при загрузке стеллажей склада на правую или на левую сторону, на фиг.7 и 8 - положение рычагов управления и грузовой платформы при впгрузке с левой стороны склада на- л(во, на фиг.9 и 10 - положение рыча- гфв управления и грузовой платформы выгрузке с правой стороны склада HcjinpaBoi на фиг. 11 - положение рыча- управления и грузовой платформы проезде тележки в конечные пози- под лежащим грузом на фиг. 12 - сз|:ематичное изображение расположения конечных выключателей на фиг.13 - пульта управления, на фиг, 14 - Г на фиг.З.
Перегрузочная тележка состоит из П€|редвижной рамы 1 с приводом 2 пере- меЦения, На передвижную раму 1 уста- нс|влены четьфе гидроцилиндра 3 с приводом от насосной станции (не показа- нй). На штоках гидроцилиндров 3 уста- нс|влена грузовая платформа подъемно-
15
5
Ю
5
0
5
0
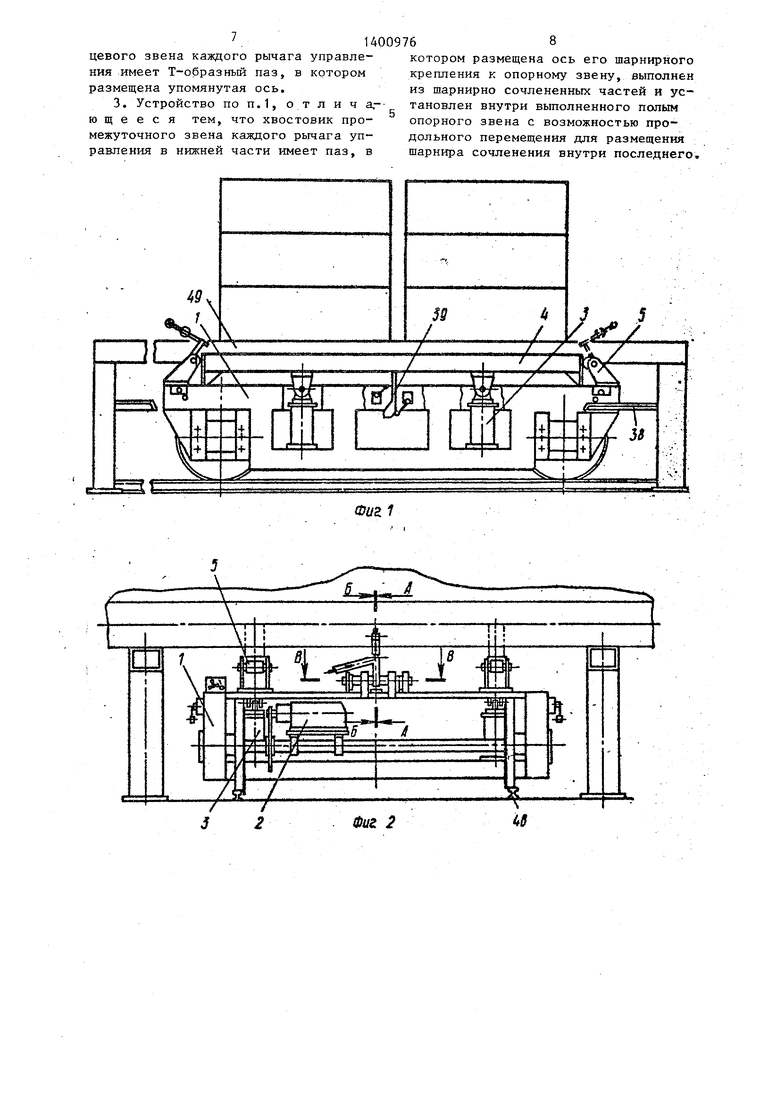
опускного стола, выполненная в виде двух, не связанных между собой, ба-° лок 4, расположенных вдоль тележки. Рама 1 снабжена упорами 5 с роликами, ,сопрягающимися с торцевыми поверхно-- стями балок 4. На раме 1 по торцам :Шарнирно установлены рычаги управления устройства управления приводными механизмами тележки, выполненные в виде шарнирного трех- звенника, состоящего из концевого 6, промежуточного 7 и опорного 8 звеньев. Концевое звено 6 имеет хвостовик 9 с Т7образным пазом ,10, сопрягающимся с шарниром 11 концевого и промежуточного звеньев, и снабжено роликами 12 и 13.
Промежуточное звено 7 имеет хвостовик, 14, соединенный с ним шарниром 15.
В нижней части хйостовик 14 имеет паз Л6 И сопрягается с опорньм звеном 8„ В верхней части промежуточное зве- .но 7 имеет боковые выступы 17 и 18 трубчатой формы, расположенные в пло- ,скости шарнира 19 промежуточного и опорного звеньев.
Опорное звено 8 имеет в нижней части упоры 20 и 21, при этом его шарнир 22 снабжен механизмом возврата, выполненным в виде пружин 23 кручения, и связано с кулачками 24, име- нлцими выступы 25 и 26 каждый. Упор 27 установлен на раме 1.
- Перегрузочная тележка снабжена концевыми выключателями 28-37 управления природами перемещения и насосной станции. На балках 4 установлены упоры 38, взаимодействующие с концевыми выключателями 28-31. Конпевые выключатели 32-35 взаимодействуют с кулачками 24 рычагов управления. Концевые включатели 36 и 37 взаимодействуют с концевыми упорами 39, установленными на конечных позициях погрузки-разгрузки. Кулачки 24 размещены попарно в зоне опорного звена 8 каждого рьгчага управления, а высту пы 25 на каждом из них размещены так что при повороте рычага по часовой стрелке опорное звено 8 взаимодействует с одним кулачком через выступ 25, а при повороте против часовой стрелки - с другим кулачком 24 через такой же выступ.25, Выступы 26 одних кулачков размещены с противоположных сторон упора 27 для взаимодействия с последним.
Тележка в торцевой части имеет пульт 40 управления, на панели которого расположены переключатель 41 рода работы Погрузка - Выгрузка, переключатель 42 напряжения погрузки или выгрузки, кнопки 43 и 44 соответ ,ственно перемещения тележки налево и направо, кнопка 45 Стоп, кнопка Подъем, кнопка 47 Опускание грузовой платформы.
Перегрузочная тележка устанавливается на рельсовый путь 48 между направляющими 49 стеллажа склада, которые являются опорами для груза.
Работа тележки и ее устройства управления осуществляется следующим образом.
Загрузка склада. Кран .(не показан укладывает грузопакет на направлякяци
49 стеллажа склада в концевые пози-/- 40 Для этого на переднем рычаге управлеции, которые находятся в конце этих направляющих,
Тележка с опущенными балками 4 находится под грузопакетом. Рычаги
.управления устанавливаются в положе- g раму 1, а на заднем рычаге управления
ние, изображенное на фиг.6. Для этого хвостовик 9 концевого звена 6 вставляем в выступ 18 промежуточного звена 7. Затем переключатель 41 устанавливается в положение Погрузка. В зависимости от направления погрузки (на правую или лейую сторону склада) устанавливается переключатель 42, Нажимается кнопка 43 или 44 в зависимости от направления перемещения тележки, после чего включается привод насосной станции и производится подъем гидроцилиндров 3,. которые поднимают 4 вместе с грузопакетом
50
55
хвостовик 9 концевого звена 6 извлекается из полости выступа 18 перемещением его паза 10 относительно щар- нира 9 до упора в него, затем поворачивается, концевое звено 6 на щарни- ре 11 и хвостовик 9 вводится в полость выступа 17 промежуточного зве на 7, Затем переключатель 41 устанавливается в положение Выгрузка.
В зависимости от направления выгрузки (на правую или на левую сторону склада) устанавливается переключатель 42, нажимается кнопка 43 или 44 в зависимости от направления переме0
над направляющими 49. При достижении балок 4 крайнег о верхнего положения упоры 38 воздействуют на концевые вы- ключатели 28 и 30, включается привод 2 перемещения, а насосная станция выключается, после чего тележка с поднятым г.рузопакетом движется в заданном направлении.
При достижении тележки заданной позиции или ранее уложенного грузо- пакета рычаг управления поворачивается по часовой стрелке относительно шарнира 22 и одним из кулачков 24
5 воздействует на концевой выключатель 33 либо 34 в зависимости от направления движений. Привод 2 отключается, а насосная станция включается и производится опускание гидроцилиндров 3,
0 Балки 4 с грузопакетом опускаются и последний укладывается на направляю-, щие 49,
При достижении балок 4 крайнего нижнего положения упоры 38 воздей5 ствуют на концевые выключатели 29 и 31, после чего привод насосной станции отключается, включается привод 2 передвижения и тележка возвращается в исходное положение. При достижении
0 тележкой концевого упора 39 срабатывает концевой выключатель 36 либо 37 и привод 2 выключается.
Выгрузка из склада. Тележка находится на конечной позиции с опущенР ными балками 4, Рычаги управления при выгрузке с левой стороны склада устанавливаются в положение, изображенное на фиг,7, а при выгрузке с правой - в положение, изображенное на фиг.9,
НИН поднимается промежуточное звено 7 из опорного звена 8 относительно шарнира 19 и поворачивается вниз относительно шарнира 15 и укладывается на
0
5
хвостовик 9 концевого звена 6 извлекается из полости выступа 18 перемещением его паза 10 относительно щар- нира 9 до упора в него, затем поворачивается, концевое звено 6 на щарни- ре 11 и хвостовик 9 вводится в полость выступа 17 промежуточного зве на 7, Затем переключатель 41 устанавливается в положение Выгрузка.
В зависимости от направления выгрузки (на правую или на левую сторону склада) устанавливается переключатель 42, нажимается кнопка 43 или 44 в зависимости от направления переме|щения тележки, после чего включается Привод 2 перемещения и тележка дви- |жется в заданном направлении с опу- 1щенными балками 4. Тележка проходит ;под лежащим на направляющих 49 грузо- лакетом и упирается в него задним ры- чагом управления, при этом балки 4 Ьказываются под грузопакетом. Рычаг |управления поворачивается относительно шарнира 22 и кулачком 24 воздействует на концевой выключатель 32 либо 35 в зависимости от направления цвижения.
I Привод 2 отключается, включается {привод насосной станции и производится подъем гидроцилиндров 3, Балки 4 поднимаются с грузопакетом над направляющими 49, При достижении балок 4 крайнего верхнего положения упоры 38 воздействуют на концевые выключа™ гели 28 и 30, насосная станция отклю- дается, а привод 2 включается и те- .|1ежка движется в заданную сторону вклада. При достижении тележкой кои™ цевого упора 39 срабатывает концевой ыключатель 38 либо-37, привод 2 и производится опускание гидроцииндров 3, Балки 4 с грузопакетом Опускаются и последний устанавливает- - ся на направляющие 49 При достижении (алок 4 крайнего нижнего положения
поры 38 воздействуют на концевые вы- |:лючатели 29 и 31 j после чего выклю- ается природ насосной станции.
Для проезда тележки в конечные по- иции под лежащими грузопакетами на аправляющих 49 стеллажа склада ры- аги управления устанавливают в поло- :ение, изображенное на фиг,11. Для cJToro промежуточные звенья 7 подни- из опорных звеньев 8, поворачи ают вниз относительно шарнира 22 и у|кладьшают на раму 1о Балки 4 нахо- д|ятся в опущенном положении. Нажимают к|нопку 43 или 44 в зависимости от не- с1бходимого направления движения, вклю- привод 2, после чего тележка движется в заданном направлении. При достижении тележки концевого упора 39 срабатывает концевой выключатель 36 И; 37 и привод 2 выключается,
Таким образом, описанное устройст- вЬ управления позволяет перегрузочной тЁлежке осуществить следующие техно- л&гические операции: погрузку с пра- вЬй либо с левой стороны склада, пе- рЁгрузку с левой либо с правой стороны склада на правую либо левую стороны для выгрузки грузов,, проезд тележки в конечные позиции под лежащим на направляющих склада грузом.
Формула изобретения
1, Устройство для управления приводными механизмами перегрузочной тележки склада, имеющей подъемно-опускной стол для груза, содержащее подпружиненные рьЕчаги управления, шар- нирно закрепленные на торцах рамы перегрузочной тележки с возможностью взаимодействия другими концами с грузом, кулачки с выступами, связанные с рычагами управления, и управляющие чувствительные элементы, связанные с механизмом горизонтального переме-. щения перегрузочной тележки и механизмом вертикального перемещения ла этой тележки, отличаю щее- с я тем, что, с целью упрощения конструкции и повышения удобства эксплуатации, рычаги управления выполнены из трех шарнирно соединенных звеньев, из которых концевые соединены с промежуточными с Возможностью поворота в вертикальной плоскости, параллельной продольной оси рамы тележки, и фиксации в двух противоположных направлениях, промежуточные - с возможностью фиксации в убранном положении с опорными .Звеньями, которые снабжены противоположно размещенными в нижней их части упорами, при этом кулачки попарно расположены в .зоне нижней,части опорных звеньев с возможностью взаимодействия выступа каждого из них с соответствующим упором опорного звена каждого рычага управления, на раме тележки установлены ограничительные упоры для кулачков, а чувствительные элементы выполнены в виде конечных выключателей, попарно размещенных в зоне опорного звена каждого рычага соответственно кулачкам с возможностью взаимодействия с последними,
2„ Устройство по п,1, о т л и ч а- ю щ е е с я тем, что промежуточное звено каждого рычага в верхней части выполнено с двумя расположенными под углом друг к другу и сопряженными между собой трубчатыми выступами с общим проемом в верхней части, ось шарнира к репления установлена в зоне сопряжения выступов, а хвостовик концевого звена каждого рычага управления имеет Т-образный паз, в котором размещена упомянутая ось.
котором размещена ось его шарнирного крепления к опорному звену, выполнен из шарнирно сочлененных частей и установлен внутри выполненного полым опорного звена с возможностью продольного перемещения для размещения шарнира сочленения внутри последнего.
/
//
т
й:
11
Фиг 2
US
фиг Л
Фиг,1
фиг.В
Фиг:3
JL
Фи2. Ю
I .
Jf
ffl
fe-
}| .
3§
M
42 I
9 9 1q 9
ip.
4S 7
J I
Погр1/з/(а IBAfZpt/s/ej Q /P
0
да./J
видГ
