/f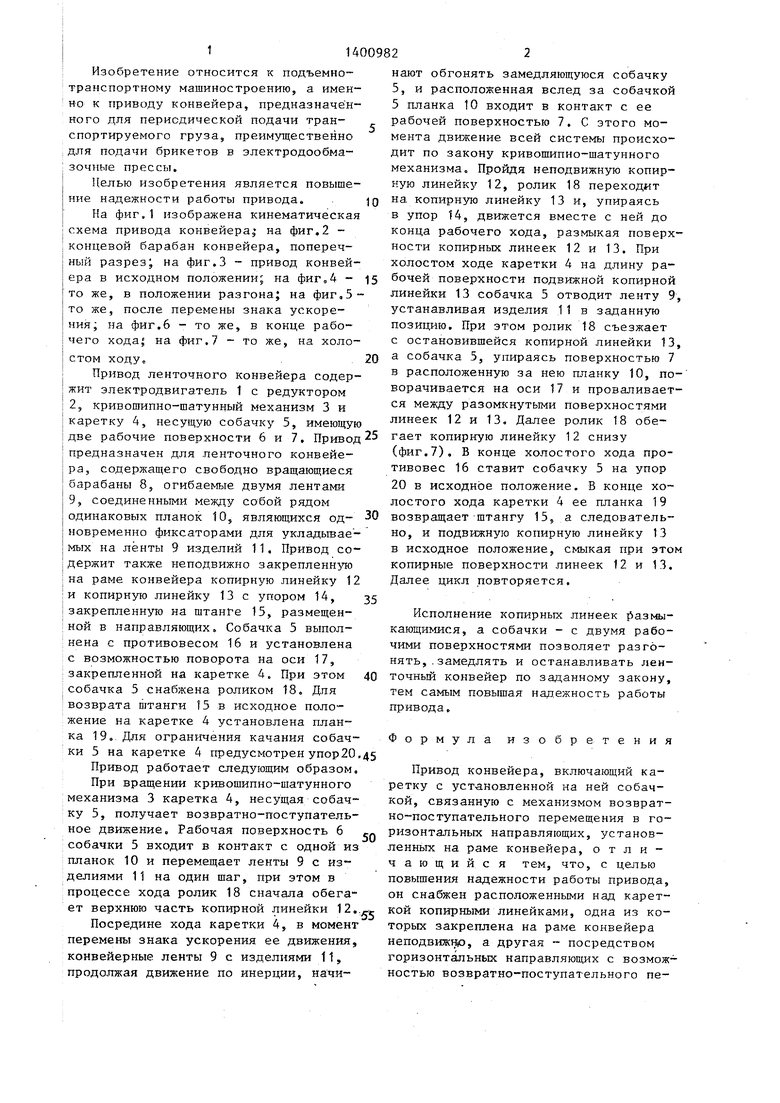
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического настила ткани на закройный стол | 1931 |
|
SU40943A1 |
| Шаговый конвейер | 1980 |
|
SU908690A1 |
| АВТОМАТ ДЛЯ ВЫСАДКИ ГВОЗДЕЙ | 1973 |
|
SU366659A1 |
| Конвейерная система линии технологической обработки | 1989 |
|
SU1728102A1 |
| Шаговый конвейер | 1977 |
|
SU747777A1 |
| МНОГОПОЗИЦИОННЫЙ ПРЕСС | 1992 |
|
RU2013173C1 |
| Отрезной автомат | 1975 |
|
SU555998A1 |
| Машина для изготовления плоских канатов | 1974 |
|
SU605428A1 |
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
| Шаговый конвейер | 1980 |
|
SU912606A1 |


«аг/
114
Изобретение относится к подъемно- транспортному машиностроению, а именно к приводу конвейера, предназначе н- ного для периодической подачи транспортируемого груза, преимущественно для подачи брикетов в электродообма- зочные прессы.
Целью изобретения является повышение надежности работы привода.
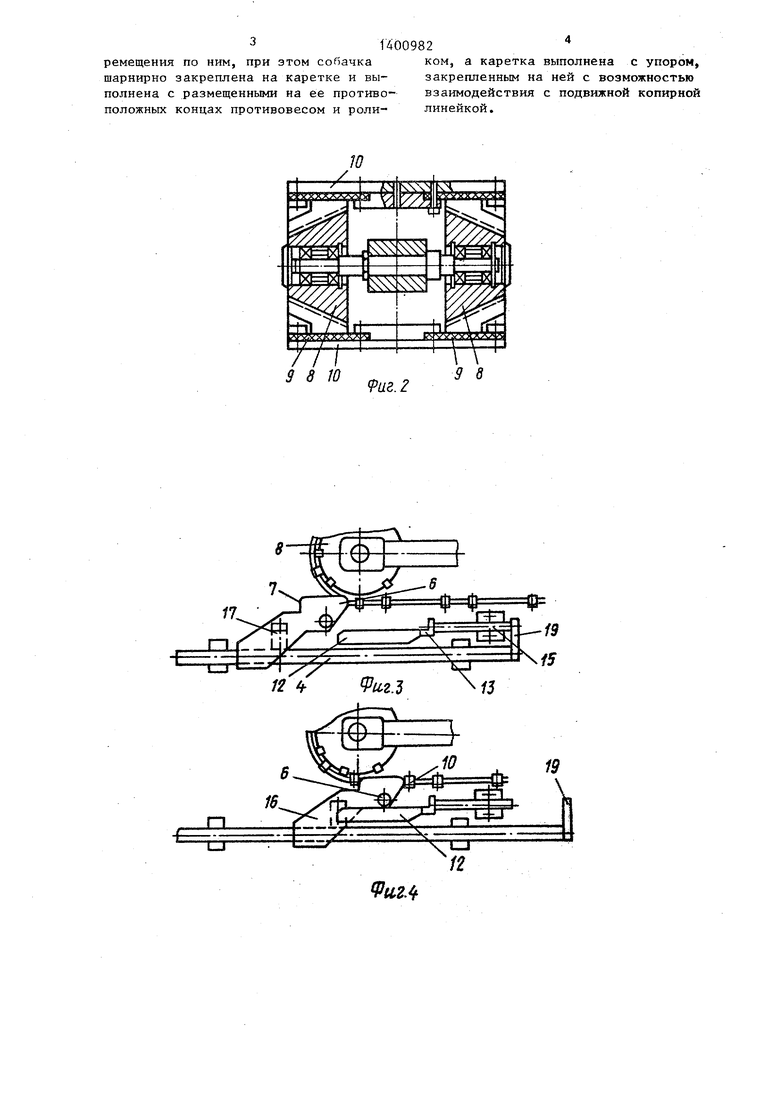
На фиг,1 изображена кинематическая схема привода конвейера на фиг,2 - концевой барабан конвейера, поперечный разрез; на фиг.З - привод конвейера в исходном положении; на фиг,4 -
то же, в положении разгона; на фиг,5то же, после перемены знака ускорения; иа фиг.6 - то же, в конце рабочего хода; на фиг.7 - то же, на холостом ходу,. 20
Привод ленточного конвейера содержит электродвигатель 1 с редуктором 2, кривошипно-шатунный механизм 3 и каретку 4, несущую собачку 5, имеющую две рабочие поверхности 6 и 7. Привод 25 гает копирную линейку 12 снизу
нают обгонять замедляющуюся соб 5, и расположенная вслед за соб 5 планка 10 входит в контакт с рабочей поверхностью 7. С этого мента движение всей системы про дит по закону кривошипно-шатунн механизма. Пройдя неподвижную к ную линейку 12, ролик 18 перехо на копирную линейку 13 и, упира в упор 14, движется вместе с н конца рабочего хода, размыкая п ности копирных линеек 12 и 13. холостом ходе каретки 4 на дли бочей поверхности подвижной коп линейки 13 собачка 5 отводит ле устанавливая изделия 11 в зада позицию. При этом ролик 18 съе с остановившейся копирной линей а собачка 5, упираясь поверхно в расположенную за нею планку ворачивается на оси 17 и провал ся между разомкнутьми поверхно линеек 12 и 13. Далее ролик 18
(фиг.7). В конце холостого ход тивовес 16 ставит собачку 5 на 20 в исходное положение. В кон лостого хода каретки 4 ее план возвращает-штангу 15, а следов но, и подвижную копирную линей в исходное положение, смыкая п копирные поверхности линеек 12 Далее цикл повторяется.
30
предназначен для ленточного конвейера, содержащего свободно вращающиеся барабаны 8, огибаемые двумя лентами 9, соединенными между собой рядом одинаковых планок 10, являющихся одновременно фиксаторами для укладьтае- мых на ленты 9 изделий 11. Привод содержит также неподвижно закрепленную на раме конвейера копирную линейку 12 и копирную линейку 13 с упором 14, 35 закрепленную на штанге 15, размещенной в направляющих. Собачка 5 выполнена с противовесом 16 и установлена с возможностью поворота на оси 17, закрепленной на каретке 4. При этом 40 собачка 5 снабжена роликом 18. Дпя возврата штанги 15 в исходное положение на каретке 4 установлена планка 19, Для ограничения качания собачки 5 на каретке 4 гфедусмотрен упор20,45
Привод работает следующим образом.
При вращении кривошипно-шатунного механизма 3 каретка 4, несущая собачку 5, получает возвратно-поступательное движение. Рабочая поверхность 6 собачки 5 входит в контакт с одной из планок 10 и перемещает ленты 9 с изделиями 11 на один шаг, при этом в процессе хода ролик 18 сначала обегает верхнюю часть копирной линейки 12..-. кой копирными линейками, одна из ко50
(фиг.7). В конце холостого хода противовес 16 ставит собачку 5 на упор 20 в исходное положение. В конце холостого хода каретки 4 ее планка 19 возвращает-штангу 15, а следовательно, и подвижную копирную линейку 13 в исходное положение, смыкая при этом копирные поверхности линеек 12 и 13. Далее цикл повторяется.
Исполнение копирных линеек {Размыкающимися, а собачки - с двумя рабочими поверхностями позволяет разгонять, . замедлять и останавливать лен- точньгй конвейер по за;а,анному закону, тем самым повышая надежность работы привода.
Формула изобретения
Привод конвейера, включающий каретку с установленной на ней собачкой, связанную с механизмом возвратно-поступательного перемещения в горизонтальных направляющих, установленных на раме конвейера, отличающийся тем, что, с целью повышения надежности работы привода, он снабжен расположенными над каретПосредине хода каретки 4, в момент перемены знака ускорения ее движения, конвейерные ленты 9 с изделиями 11, продолжая движение по инерции, начнторых закреплена на раме конвейера неподвиж, а другая - посредством горизонтальных направляющих с возможностью возвратно-поступательного пегает копирную линейку 12 снизу
нают обгонять замедляющуюся собачку 5, и расположенная вслед за собачкой 5 планка 10 входит в контакт с ее рабочей поверхностью 7. С этого момента движение всей системы происходит по закону кривошипно-шатунного механизма. Пройдя неподвижную копирную линейку 12, ролик 18 переходит на копирную линейку 13 и, упираясь в упор 14, движется вместе с ней до конца рабочего хода, размыкая поверхности копирных линеек 12 и 13. При холостом ходе каретки 4 на длину рабочей поверхности подвижной копирной линейки 13 собачка 5 отводит ленту 9, устанавливая изделия 11 в заданную позицию. При этом ролик 18 съезжает с остановившейся копирной линейки 13, а собачка 5, упираясь поверхностью 7 в расположенную за нею планку 10, поворачивается на оси 17 и проваливается между разомкнутьми поверхностями линеек 12 и 13. Далее ролик 18 обегает копирную линейку 12 снизу
кой копирными линейками, одна из ко
(фиг.7). В конце холостого хода противовес 16 ставит собачку 5 на упор 20 в исходное положение. В конце холостого хода каретки 4 ее планка 19 возвращает-штангу 15, а следовательно, и подвижную копирную линейку 13 в исходное положение, смыкая при этом копирные поверхности линеек 12 и 13. Далее цикл повторяется.
Исполнение копирных линеек {Размыкающимися, а собачки - с двумя рабочими поверхностями позволяет разгонять, . замедлять и останавливать лен- точньгй конвейер по за;а,анному закону, тем самым повышая надежность работы привода.
Формула изобретения
Привод конвейера, включающий каретку с установленной на ней собачкой, связанную с механизмом возвратно-поступательного перемещения в горизонтальных направляющих, установленных на раме конвейера, отличающийся тем, что, с целью повышения надежности работы привода, он снабжен расположенными над каретторых закреплена на раме конвейера неподвиж, а другая - посредством горизонтальных направляющих с возможностью возвратно-поступательного пе 1400982
ремещения по ним, при этом собачка ком, а каретка выполнена с упором,
шарнирно закреплена на каретке и выполнена с размещенными на ее противоположных концах противовесом и ролизакрепленным на ней с возможностью взаимодействия с подвижной копирной
линейкой.
t / / /
/п
9 8 10
закрепленным на ней с возможностью взаимодействия с подвижной копирной
линейкой.
9аг.2
Vu,Z4
12 16
m
П Ь ш,1
ц.г.5
| Привод ленточного конвейера | 1979 |
|
SU859257A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Шаговый конвейер Пар-Пан | 1982 |
|
SU1118590A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
