.
(Л
ISD
ел
01
(Dof.t
Изобретение относится к подъемно, транспортному оборудованию, а именно к грузоподъемным кранам для обслуживания гидротехнических затворов.
Цель изобретения - повышение надежности работы.
На фиг. I представлен козловой кран в момент начала спуска затвора; на фиг. 2 - разрез А-А на фиг. 1;
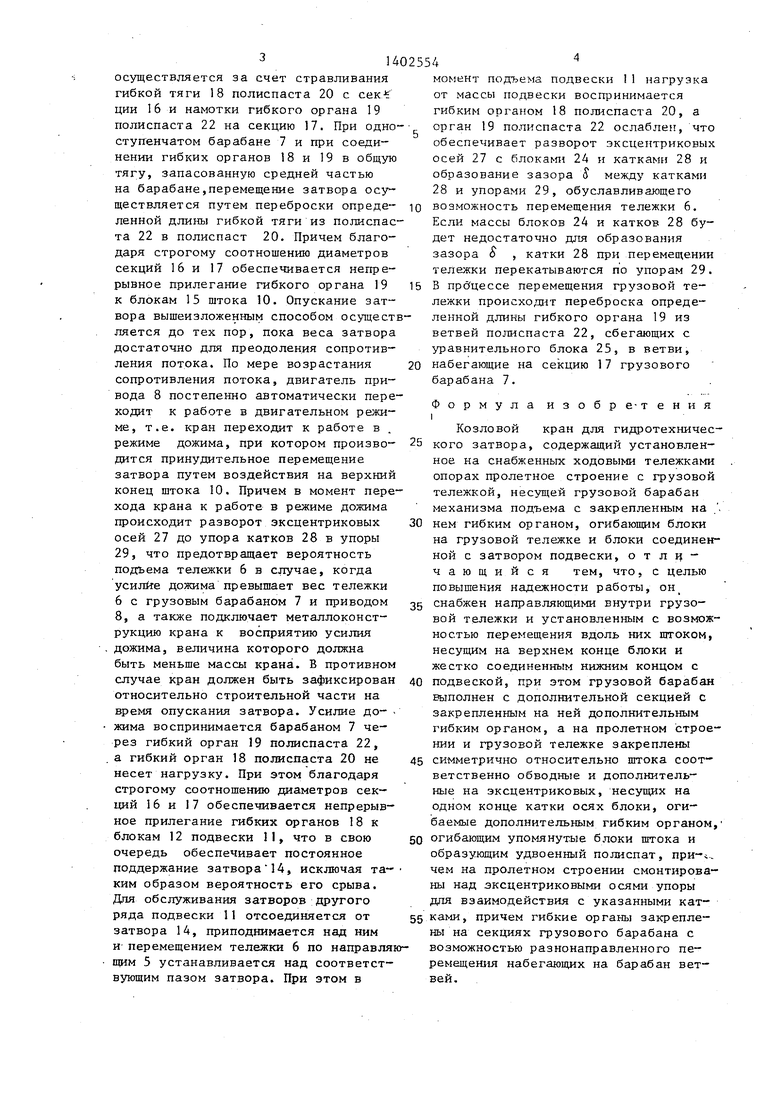
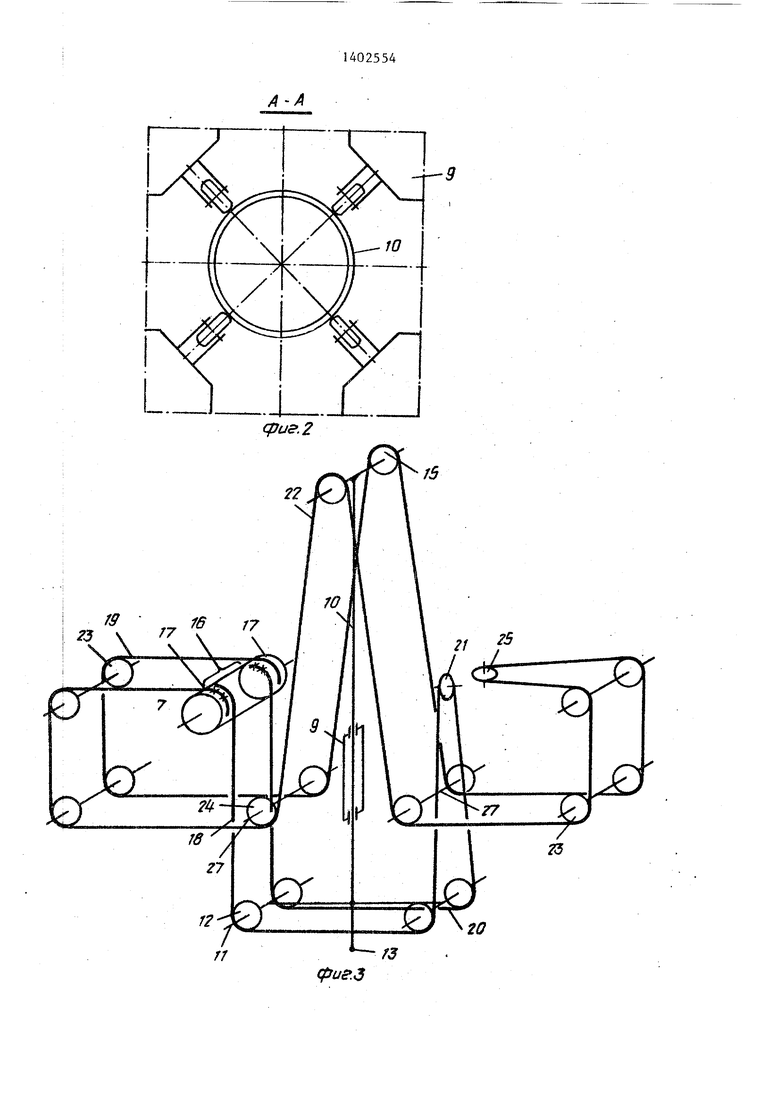
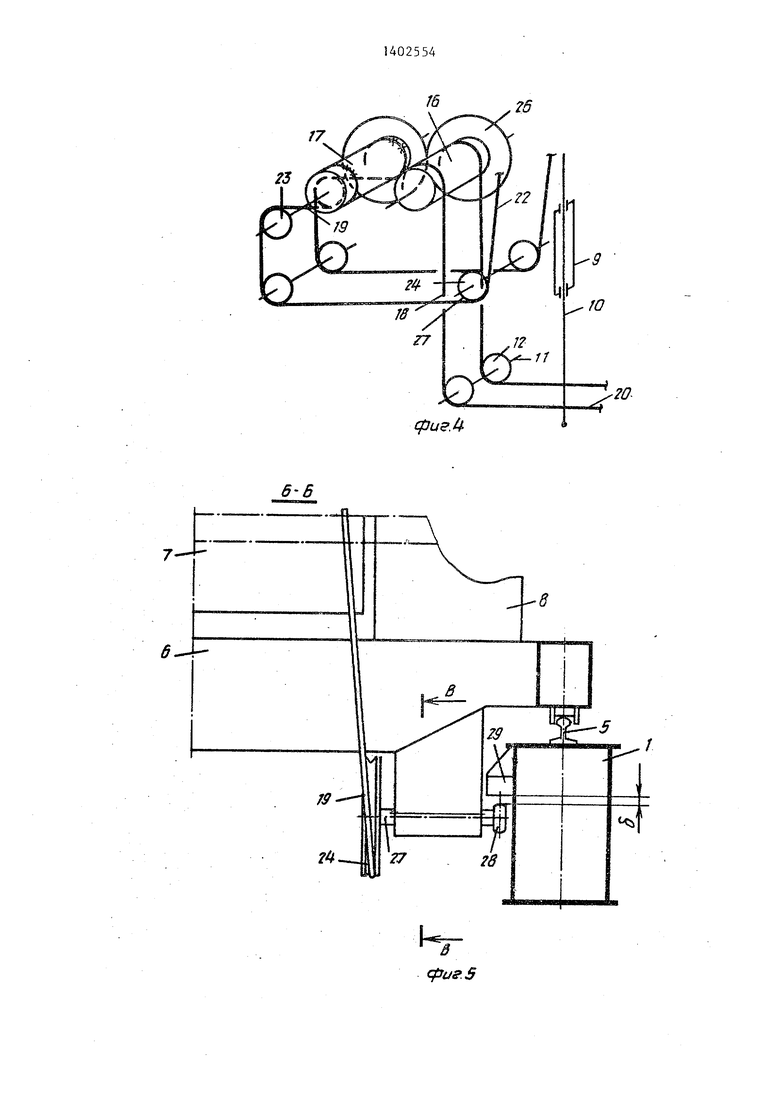
и фиг, 3 - схема запасовки гибких тяг полиспастов; на фиг. 4 - вариант выполнения грузового барабана с параллельным размещением его секций; на фиг. 5 - разрез Б-Б на фиг. 1;
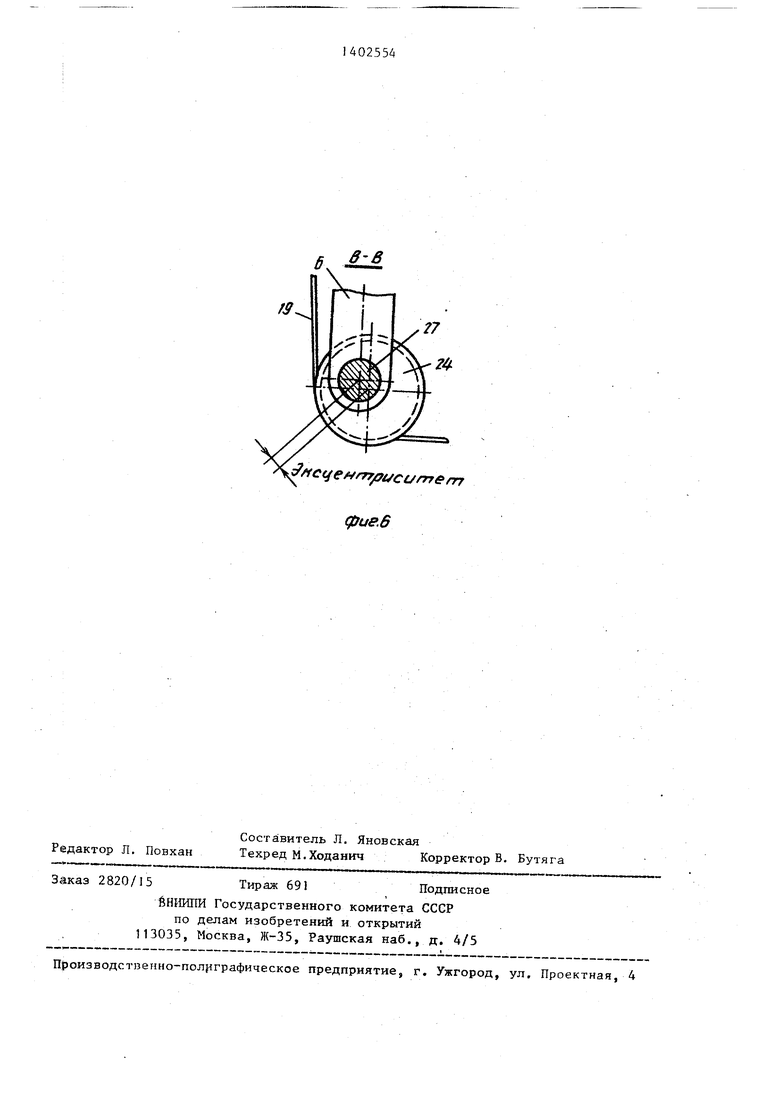
на фиг. 6 - разрез В-В на фиг. 5. : Козловой кран для гидротехнического затвора содержит пролетное строение 1, установленное посредством опор 2 и ходовых балок 3 на ходовые тележки 4. На направляющих 5 . пролетного строения 1 смонтирована грузовая тележка 6, несущая грузовой барабан 7 с приводом 8. В вертикальных направляницих 9 тележки 6 смонти- рован средней частью шток 10. Нижний Крнец штока 10 жестко соединен с подвеской П, оснащенной блоками 12 и узлом 13 шарнирного соединения с затвором 14. Подвеска 11 может быть соединена с затвором 14 непосредственно или через пггангу (не показано) ;На верхнем конце штока 10 смонтирова- |ны блоки 15. Грузовой барабан 7 сос- |тоит из двух секций 16 и 17с двои- |ной нарезкой с гибкими органами 18 |и 19 соответственно. Гибкий орган |18 запасован в сдвоенный полиспаст |20 через блоки 12 подвески 11 и . уравнительный блок 21, смонтирован- ный на грузовой тележке 6. Гибкий ;орган 19 запасован в сдвоенный полис :паст 22 через обводные блоки 23, закрепленные на пролетном строении . ;1, блоки 24, смонтированные в нижней |части грузовой тележки, блоки 15, установленные на верхнем конце штопка 10 и уравнительный блок 25, смонтированный на грузовой тележке 6. Секции 16 и 17 грузового барабана 7 могут быть размещены соосно(фиг.3) при этом гибкие органы 18 и 19 долж. - ны быть запасованы на секциях во взаимно противоположных направлениях Грузовой барабан 7 может быть выполнен путем параллельного размещения секций 16 и 17 и соединения их с помощью зубчатой передачи 26 (фиг.4) при этом гибкие органы 18 и 19 долж
c 0 5 Q
5
ны быть запасованы в одном направлении, так как секции 16 и 17 вращаются в противоположных направлениях. Соотношение диаметров секций 16 и
17барабана 7 должно быть прямо пропорционально соотношению кратностей полиспатов 20 и 22 соответственно, что обеспечивает равенство скоростей вертикального поступательного перемещения участков гибких органов, огибающих блоки 15 штока 10 и блоки 12 подвески 11, и как следствие-непрерывное прилегание гибкого органа 18
к блокам 12 подвески 11 в процессе дожима затвора (что исключает вероятность среша затвора) , а также непрерывное прилегание гибкого органа 19 к блокам 15 штока 10. При соосном размещении секций 16 и 17 и равенстве их диаметров концы гибких органов
18и 19 могут быть соединены в общий тяговый орган, т.е. барабан 7 может быть выполнен перематывающим, что позволяет уменьшить длину гибких органов 18 и 19 и барабана 7. Блоки 24 смонтированы на грузовой тележке 6 посредством эксцентриковых осей 27 с катками 28, расположенными с возможностью взаимодействия с упорами 29, выполненными с заходными участками под катки 28 и закрепленными на пролетном строении 1 над. .эксцентри- ковыми осями 27. Тележка 6 оснащена противоугонным захватом 30.
Козловой кран работает следующим образом.
Для маневрирования тем или иным затвором гидросооружения грузовая тележка 6 перемещается к соответст вующему пазу, устанавливая над ним подвеску 11, и фиксируется при помощи противоугонного захвата 30 относительно направляющих 5. Причем во время перемещения тележки 6 катки 28 размещены с зазором S (20 мм) относительно упоров 29. Подъем зат- . вора 14 осуществляется вращением грузового барабана 7 в направлении подъема подвески 11 (на фнг. 1 - против часовой стрелки). Опускание затвора 14 производится вращением грузового барабана 7 в направлении опускания подвески 11 (на фиг. 1 - по часовой стрелке). При этом нагрузка от веса затвора воспринимается барабанам 7 через подвеску П, полиспаст 20, двигатель привода 8 работает в гене- раторном режиме, а опускание затвора
10
15
25
30
осуществляется за счет стравливания гибкой тяги 18 полиспаста 20 с секЛ ции 16 и намотки гибкого органа 19 полиспаста 22 на секцию 17. При одноступенчатом барабане 7 и при соединении гибких органов 18 и 19 в общую тягу, запасованную средней частью на барабане,перемещение затвора осуществляется путем переброски определенной длины гибкой тяги из полиспаста 22 в полиспаст 20. Причем благодаря строгому соотношению диаметров секций 16 и 17 обеспечивается непрерывное прилегание гибкого органа 19 к блокам 15 щтока 10. Опускание затвора вышеизложенным способом осуществляется до тех пор, пока веса затвора достаточно для преодоления сопротивления потока. По мере возрастания 20 сопротивления потока, двигатель привода 8 постепенно автоматически переходит к работе в двигательном режиме, т.е. кран переходит к работе в режиме дожима, при котором производится принудительное перемещение затвора путем воздействия на верхний конец штока 10. Причем в момент перехода крана к работе в режиме дожима происходит разворот эксцентриковых осей 27 до упора катков 28 в упоры 29, что предотвращает вероятность подъема тележки 6 в случае, когда усилие дожима превышает вес тележки 6 с грузовым барабаном 7 и приводом 8, а также подключает металлоконструкцию крана к восприятию усилия дожима, величина которого должна быть меньше массы крана. В противном случае кран должен быть зафиксирован относительно строительной части на время опускания затвора. Усилие до-
жима воспринимается барабаном 7 через гибкий орган 19 полиспаста 22,
а гибкий орган 18 полиспаста 20 не несет нагрузку. При этом благодаря строгому соотношению диаметров секций 16 и 17 обеспечивается непрерывное прилегание гибких органов 18 к блокам 12 подвески 11, что в свою очередь обеспечивает постоянное поддержание затвора 14, исключая та- КИМ образом вероятность его срыва. Для обслуживания затворов другого ряда подвески 11 отсоединяется от затвора 14, приподнимается над ним и перемещением тележки 6 по направляющим 5 устанавливается над соответствующим пазом затвора. При этом в
40
45
35
50
55
момент подъема подвески 1 нагрузка от массы подвески воспринимается гибким органом 18 полиспаста 20, а орган 19 полиспаста 22 ослаблен, что обеспечивает разворот эксцентриковых осей 27 с блоками 24 и катками 28 и образование зазора S между катками 28 и упорами 29, обуславливающего возможность перемещения тележки 6. Если массы блоков 24 и катков 28 будет недостаточно щш образования зазора S , катки 28 при перемещении тележки перекатываются по упорам 29. В процессе перемещения грузовой тележки происходит переброска определенной длины гибкого органа 19 из ветвей полиспаста 22, сбегающих с уравнительного блока 25, в ветви, набегающие на секцию 17 грузового барабана 7.
Ф о
р м у л а
Козловой кого затвора.
изобре-тения
кран для гидротехкичес- содержащий установленное на снабженных ходовыми тележками опорах пролетное строение с грузовой тележкой, несущей грузовой барабан механизма подъема с закрепленным на . нем гибким органом, огибающим блоки на грузовой тележке и блоки соединенной с затвором подвески, отлучающийся тем, что. с целью повышения надежности работы, он
снабжен направляющими внутри грузовой тележки и установленным с возможностью перемещения вдоль них штоком, несущим на верхнем конце блоки и жестко соединенным нижним концом с подвеской, при этом грузовой барабан выполнен с дополнительной секцией с закрепленным на ней дополнительным гибким органом, а на пролетном строении и грузовой тележке закреплены симметрично относительно штока соот ветственно обводные и дополнительные на эксцентриковых, несущих на одном конце катки осях блоки, огибаемые дополнительным гибким органом,
огибающим упомянутые блоки штока и образующим удвоенный полиспат, при-.. чем на пролетном строении смонтированы над эксцентриковыми осями упоры дпя взаимодействия с указанными катками, причем гибкие органы закреплены на секциях грузового барабана с возможностью разнонаправленного перемещения набегающих на барабан ветвей.
r-9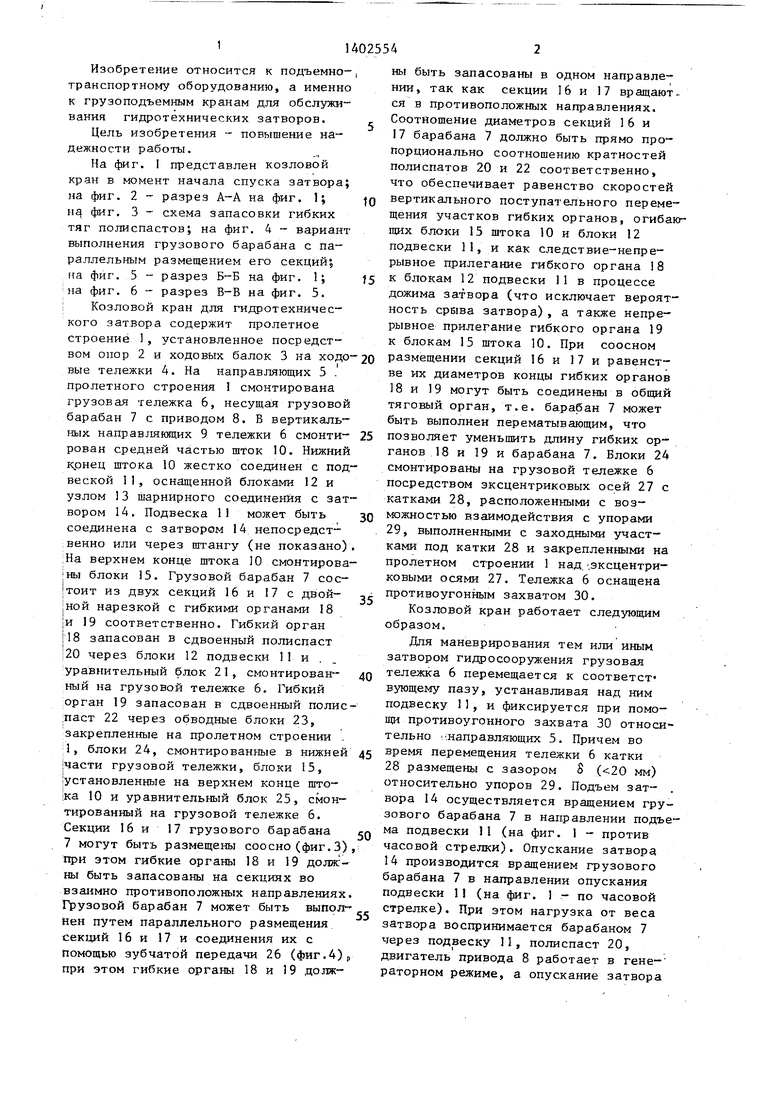
| название | год | авторы | номер документа |
|---|---|---|---|
| Козловой кран для гидротехнического затвора | 1986 |
|
SU1428683A2 |
| Козловой кран для гидротехнического затвора | 1985 |
|
SU1312059A2 |
| Козловой кран для гидротехнического затвора | 1985 |
|
SU1283213A1 |
| Козловой кран для гидротехнического затвора | 1982 |
|
SU1084234A1 |
| Грузоподъемное устройство | 1973 |
|
SU531786A1 |
| Кран для гидротехнических затворов | 1988 |
|
SU1602851A1 |
| Грузоподъемное устройство | 1987 |
|
SU1638099A1 |
| Грузоподъемное устройство | 1973 |
|
SU527371A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Козловой кран для обслуживания гидротехнического оборудования | 1982 |
|
SU1039857A1 |
Изобретение относится к подъемно-транспортному оборудованию. Цель изобретения - повышение надежности работы. Козловой кран содержит пролетное строение 1 с грузовой тележкой 6, в вертикальных направляющих 9 которой установлен шток 10, соеди- неиный с подвеской 11 и несущий на верхнем конце блоки 12. На пролетном строении установлены блоки 23, на грузовой тележке на эксцентриковых осях-блоки 24, а на подвеске 11 - блоки 12, огибаемые гибкими органами 19, 18, закрепленными на секциях грузового барабана и образующими сдвоенные полиспасты. На пролетном строении закреплен упор 29, взаимодействующий с катками 28, установленными на эксцентриковых осях, 6 ил.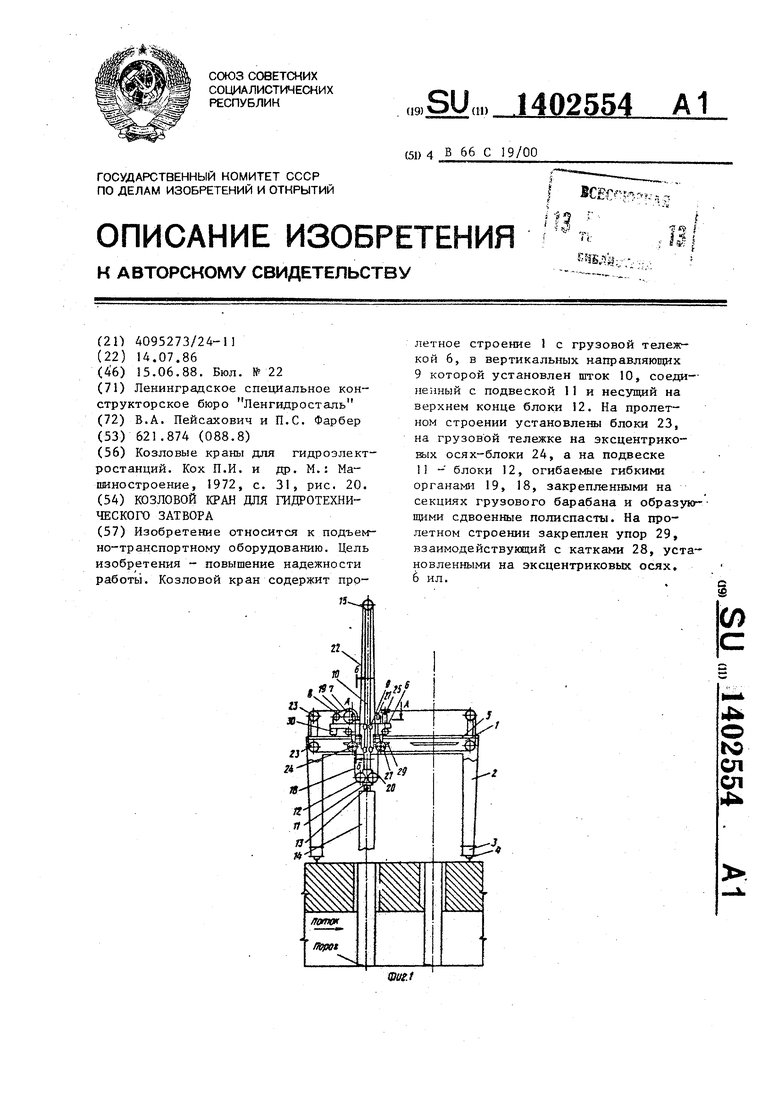
сриг.2
фиг.З
20
17
/J
20
HcfJue.S
/
ccfe rry/y c
в-в
27
ите/гт
фие.6
| Козловые краны для гидроэлектростанций | |||
| Кох П.И | |||
| и др | |||
| М.: Машиностроение, 1972, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
