о
1чЭ
4
Изобретение относится к металлообработ- ботке, в частности к станочной оснастке, предназначенной для закрепления обрабатываемых деталей на металлорежущих станках.
Целью изобретения является расширение технологических возможностей путем увеличения диапазона размеров поджимаемой детали.
Указанная цель достигается тем, что клиновой упор устанавливается с возможностью возвратно-поступательного перемещения параллельно оси опорного элемента.
На чертеже изображена подводимая опора, продольный разрез.
Подводимая опора состоит из корпуса 1, в котором в направляющей втулке 2 установлен подвижной толкатель 3 с пазом и отверстием для крепления в нем клинового упора 4. Толкатель 3 жестко связан со штоком 5 гидроцилиндра 6,, который сообщает толкателю 3 возвратно-поступательное перемещение вдоль оси. На корпусе 1 смонтирован также стакан 7 с направляющей втулкой 8, в которой установлен опорный элемент 9 с клиновым скосом 10. Направляющие втулки 2 и 8 и стакан 7 имеют паз для перемещения клинового упора 4. Опорный элемент 9 подпружинен пружиной 11 сжатия с одного торца, а на другом - укреплена сменная поджимная пята 12 для упора в зажимаемую деталь 13.
Подводимая опора работает следующим образом.
В исходном положении щток 5 гидроцилиндра привода и толкатель 3, связанный с
ним, находятся в отведенном от детали положении, т.е. в крайнем левом положении. При этом клиновой упор 4 своим торцом контактирует с боковым торцом клинового скоса 10 опорного элемента 9, удерживая последний в отведенном положении и сжимая при этом пружину И. Гидроцилиндр б щто- ком 5 подает толкатель 3 с клиновым упором 4 в направляющей втулке 2. Под действием усилия пружины 11 опорный элемент 9 перемещается также вправо, при этом торец клинового скоса догоняет упор 4 до тех пор, пока опорный элемент 9 не упрется своей пятой 12 в зажимную деталь 13. При этом толкатель 3 продолжает двигаться вправо, пока клиновой упор 4 не заклинит опорный элемент 9. Для отвода опорного эле.мен- та 9 Б исходное положение толкатель 3 с клиновым упором 4 перемещается от гидроцилиндра влево, действуя на торец клинового скоса опорного элемента 9, и отводит последний, сжимая пружину 11 до тех пор, пока не выберется весь ход штока 5 гидроцилиндра.
Формула изобретения
Подводимая опора, в корпусе которой параллельно установлены с возможностью возвратно-поступательного перемещения подпружиненный опорный эле.мент и толкатель, между которыми расположен клиновой упор, отличомщаяся тем, что, с целью расширения технологических возможностей путем увеличения диапазона размеров поджимаемой детали, клиновой упор закреплен на толкателе.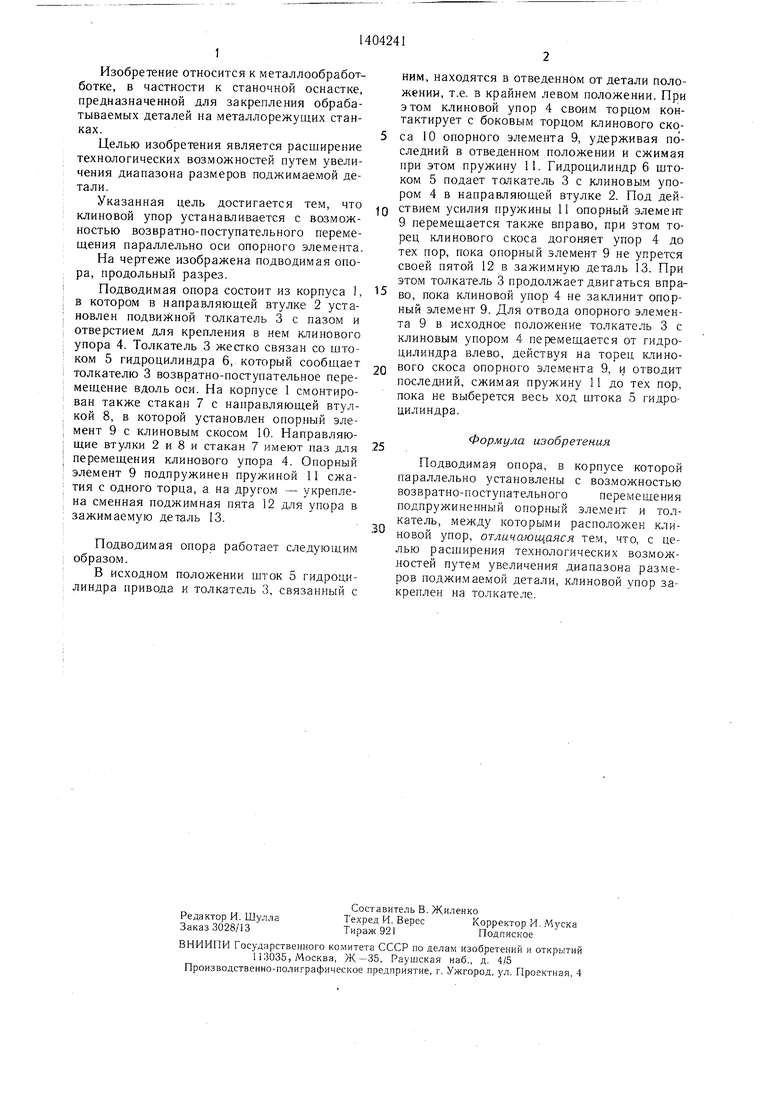
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод подводимой опоры | 1977 |
|
SU621532A1 |
| Подводимая опора | 1990 |
|
SU1757839A1 |
| Самоустанавливающаяся опора | 1990 |
|
SU1742026A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАИОВКИ И ЗАКРЕПЛЕНИЯ ПРИ ОБРАБОТКЕ СКОСОВ ИЗДЕЛИЙ ТИПА КОРПУСА БУРОВОГО ДОЛОТА | 1968 |
|
SU208416A1 |
| Загрузочно-разгрузочное устройство | 1987 |
|
SU1563893A1 |
| Автоматический станок для накатывания знаков на цилиндрических изделиях | 1960 |
|
SU133785A1 |
| Подводимая опора | 1990 |
|
SU1710270A1 |
| Устройство для обработки деталей типа гильз цилиндров | 1983 |
|
SU1122441A2 |
| Подводимая опора | 1986 |
|
SU1340967A1 |
| Автоматическая линия | 1988 |
|
SU1708545A1 |
Изобретение относится к металлообработке, в частности к станочной оснастке, предназначенной для закрепления деталей на металлообрабатывающих станках. Цель изобретения - расширение технологических возможностей путем увеличения диапазона размеров зажимаемой детали. В корпусе 1 ycTaHOB.netuM подвижный таткатель 3 с закрепленным в нем клиновым упором 4 и взаимодействующий с пружиной 11 опорный элемент 9 с клиновым скосом 10. Подводимая опора работает следующим образом. В исходном положении толкатель 3 находится в отведенном от детати положении. При этом клиновой упор 4 своим торцом контактирует с боковым торцом клинового скоса 10 опорного элемента 9. При перемещении таткателя 3 в направлепии закрепляемой опорный элемент 9 под действием пружины 11 перемещается вместе с ним до момента касания с закрепляемой деталью, при это.м толкатель 3 продолжает дижсние, пока клиновой упор 4 не заклинит опорный элемент 9. Для отвода опорного элемента 9 в исходное положение толкатель 3 с клиновым упором 4 перемеи.ается в обратном направлении, перемещая за собой опорный элемент. 1 ил. с в (Л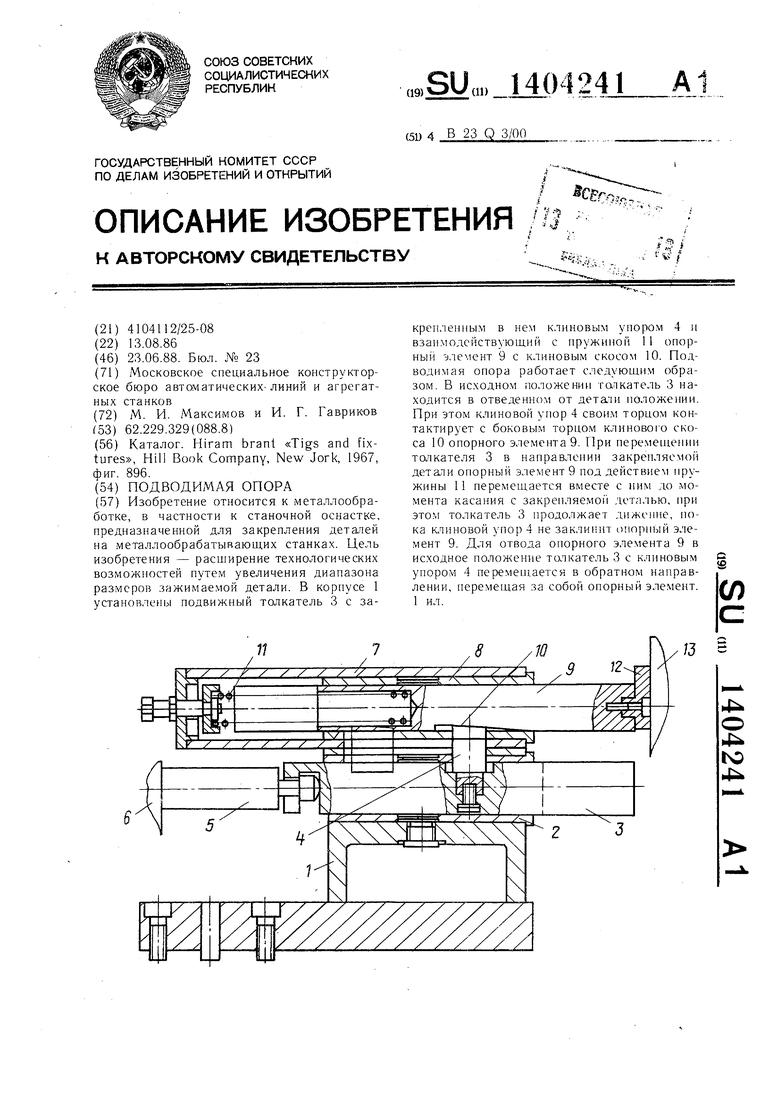
| Каталог | |||
| Hiram brant «Tigs and fi.x- tures, Hill Book Company, New Jork, 1967, фиг | |||
| Нож для соломорезки | 1922 |
|
SU896A1 |
