счет улучшения динамических характеристик перемещения схвата. При выдвижении штанги 3 от воздействия штока 7 через серьгу 10 и ролики 16 на поперечную полку копира 13 штанги обеспечивается вылет схвата 4. При достижении роликом 17 горизонтальной полки копира 14 серьга 10 отклоняется от вертикали и, воздействуя на губку 6, обеспечивает зажим инструмента. 6 ил.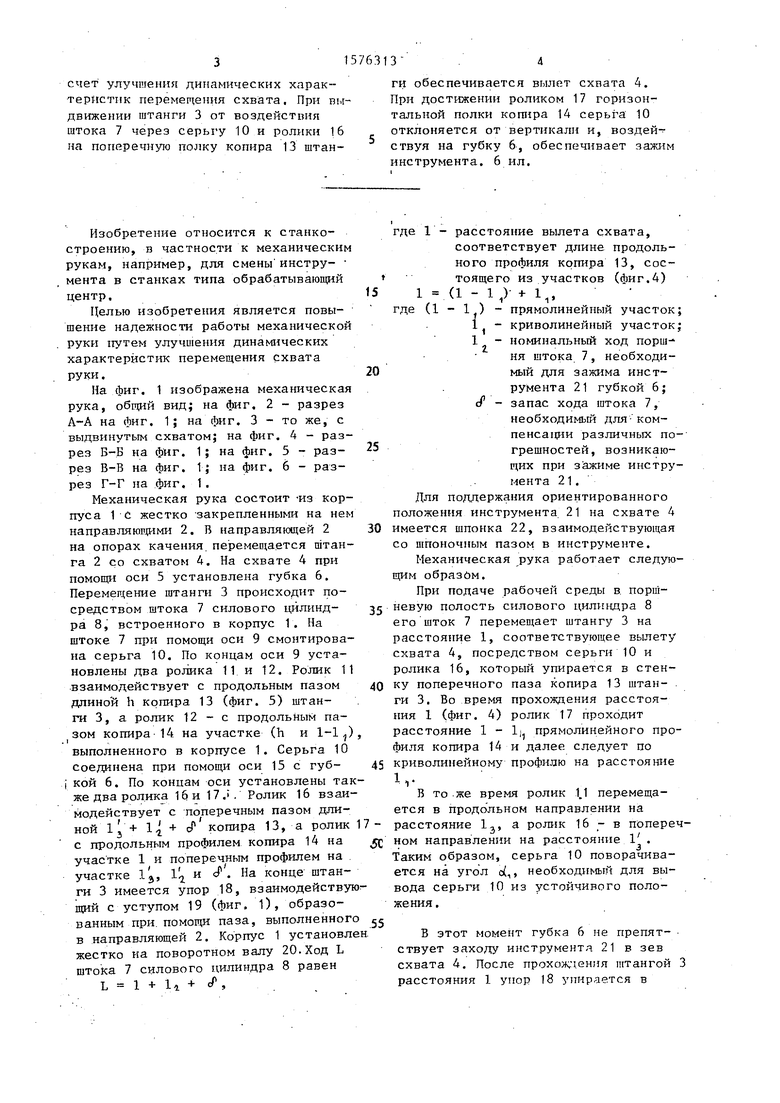
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Манипулятор для автоматической смены инструмента | 1986 |
|
SU1404247A2 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Устройство для автоматической смены инструмента | 1986 |
|
SU1421483A1 |
| Устройство для автоматической смены инструментов | 1986 |
|
SU1449314A1 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1425032A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Манипулятор для автоматической смены инструментов | 1986 |
|
SU1393578A1 |
| Робототехнологический комплекс | 1985 |
|
SU1289677A1 |
Изобретение относится к области станкостроения, в частности к механическим рукам, например, для смены инструмента в многоцелевых станках типа "обрабатывающий центр". Целью изобретения является повышение надежности работы механической руки за счет улучшения динамических характеристик перемещения схвата. При выдвижении штанги 3 от воздействия штока 7 через серьгу 10 и ролики 16 на поперечную полку копира 13 штанги обеспечивается вылет схвата 4. При достижении роликом 17 горизонтальной полки копира 14 серьга 10 отклоняется от вертикали и, воздействуя на губку 6, обеспечивает зажим инструмента. 6 ил.
Изобретение относится к станкостроению, в частности к механическим рукам, например, для смены инстру- мента в станках типа обрабатывающий центр.
Целью изобретения является повышение надежности работы механической руки путем улучшения динамических характеристик перемещения схвата руки.
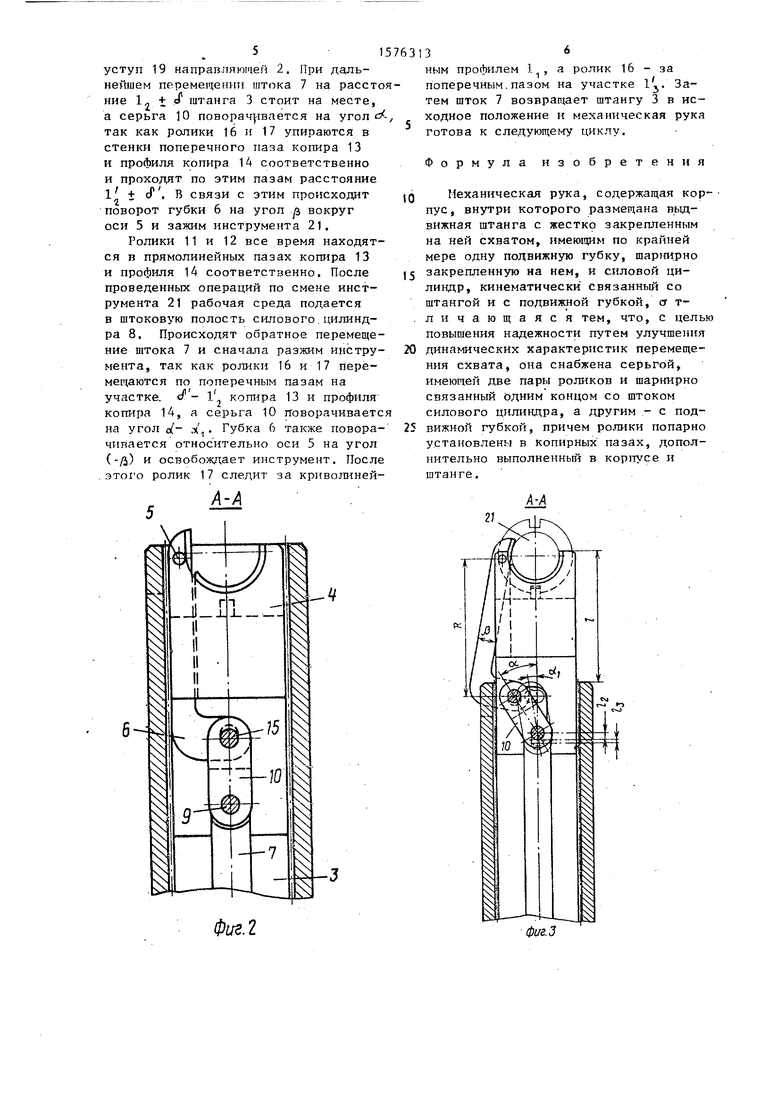
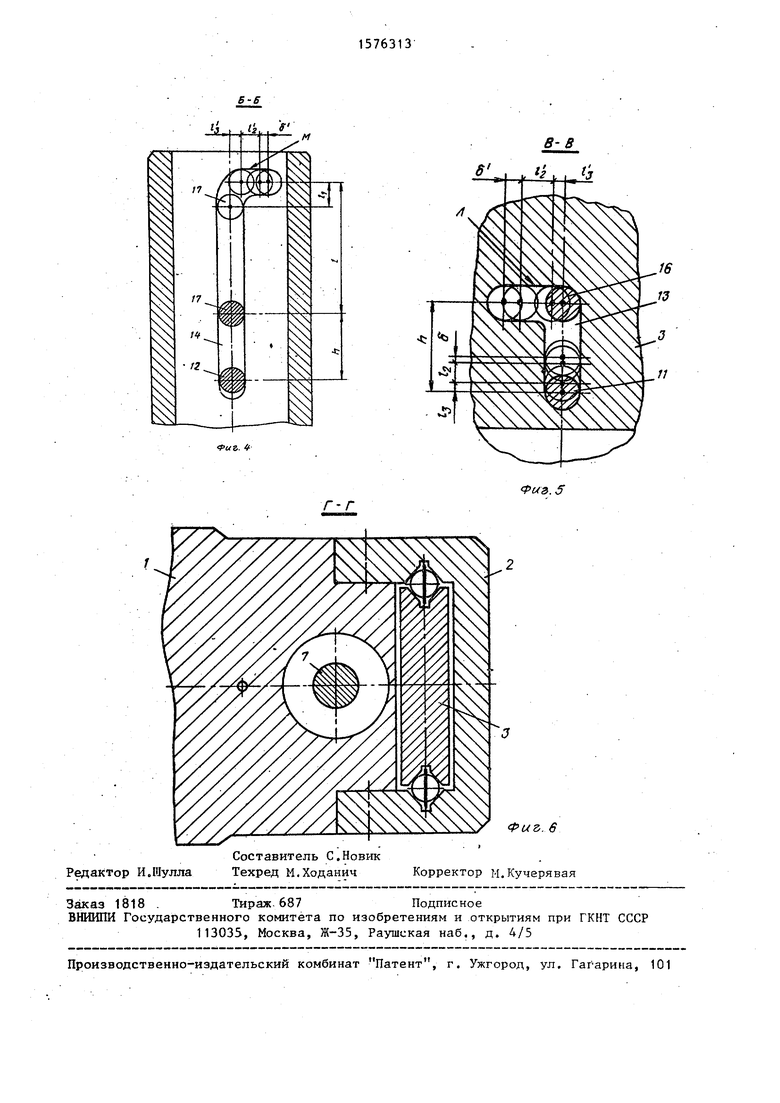
На фиг. 1 изображена механическая рука, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - то же, с выдвинутым охватом; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез В-В на фиг. 1; на фиг. 6 - разрез Г-Г на фиг. 1.
Механическая рука состоит -из корпуса 1 с жестко закрепленными на нем направляющими 2. В направляющей 2 на опорах качения перемещается штанга 2 со схватом 4. На схвате 4 при помощи оси 5 установлена губка 6. Перемещение штанги 3 происходит посредством штока 7 силового цйлинд- ра 8, встроенного в корпус 1. На штоке 7 при помощи оси 9 смонтирована серьга 10. По концам оси 9 установлены два ролика 11 и 12. Ролик 11 взаимодействует с продольным пазом длиной h копира 13 (фиг. 5) штанги 3, а ролик 12 - с продольным пазом копира 14 на участке (h и 1-1.,) выполненного в корпусе 1. Серьга 10 соединена при помощи оси 15 с губ- i кой 6. По концам оси установлены также два ролика 16 и 17.. Ролик 16 взаимодействует с поперечным пазом длиной lj + 1{ + сР копира 13, а ролик с продольным профилем копира 14 на участке 1 и поперечным профилем на участке l s, 1 г и /. На конце штанги 3 имеется упор 18, взаимодействующий с уступом 19 (фиг. 1), образованным при помощи паза, выполненного в направляющей 2. Корпус 1 установле жестко на поворотном валу 20.Ход L штока 7 силового цилиндра 8 равен
L 1 + Ъ
с/Ч
5
0
5
0 35 40 45 -
где 1 - расстояние вылета схвата,
соответствует длине продольного профиля копира 13, состоящего из участков (фиг.4) 1 (1 - ,) + 1п,
где (1 - lt) - прямолинейный участок; 1 - криволинейный участок; 1 - номинальный ход поршня штока 7, необходимый для зажима инструмента 21 губкой 6; cf - запас хода штока 7, необходимый для компенсации различных погрешностей, воэникаю- рщх при зажиме инструмента 21.
Для поддержания ориентированного положения инструмента 21 на схвате 4 имеется шпонка 22, взаимодействующая со шпоночным пазом в инструменте.
Механическая рука работает следующим образом.
При подаче рабочей среды в поршневую полость силового цилиндра 8 его шток 7 перемещает штангу 3 на расстояние 1, соответствующее вылету схвата 4, посредством серьги 10 и ролика 16, который упирается в стенку поперечного паза копира 13 штанги 3. Во время прохождения расстояния 1 (фиг. 4) ролик 17 проходит расстояние 1 - 1 прямолинейного профиля копира 14 и далее следует по криволинейному профилю на расстояние
1,В то же время ролик 1.1 перемещается в продольном направлении на расстояние 13, а ролик 16 - в поперечном направлении на расстояние 1 . Таким образом, серьга 10 поворачивается на угол о(, необходимый для вывода серьги 10 из устойчивого положения.
В этот момент губка 6 не препятствует заходу инструмента 21 в зев схвата 4. После прохождения штангой 3 расстояния 1 упор 18 упирается в
Фиг. I
фигЗ
4 „Ь
м
/
1
1
1
С
fuz
Фиг. 5
Фиг, 6
| Передок к тракторным плугам | 1927 |
|
SU14493A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
