Изобретение относится к машиностроению и может быть использовано в станках сЧПУ.
Целью изобретения является повышение надежности путем увеличения жесткости положения механической руки.
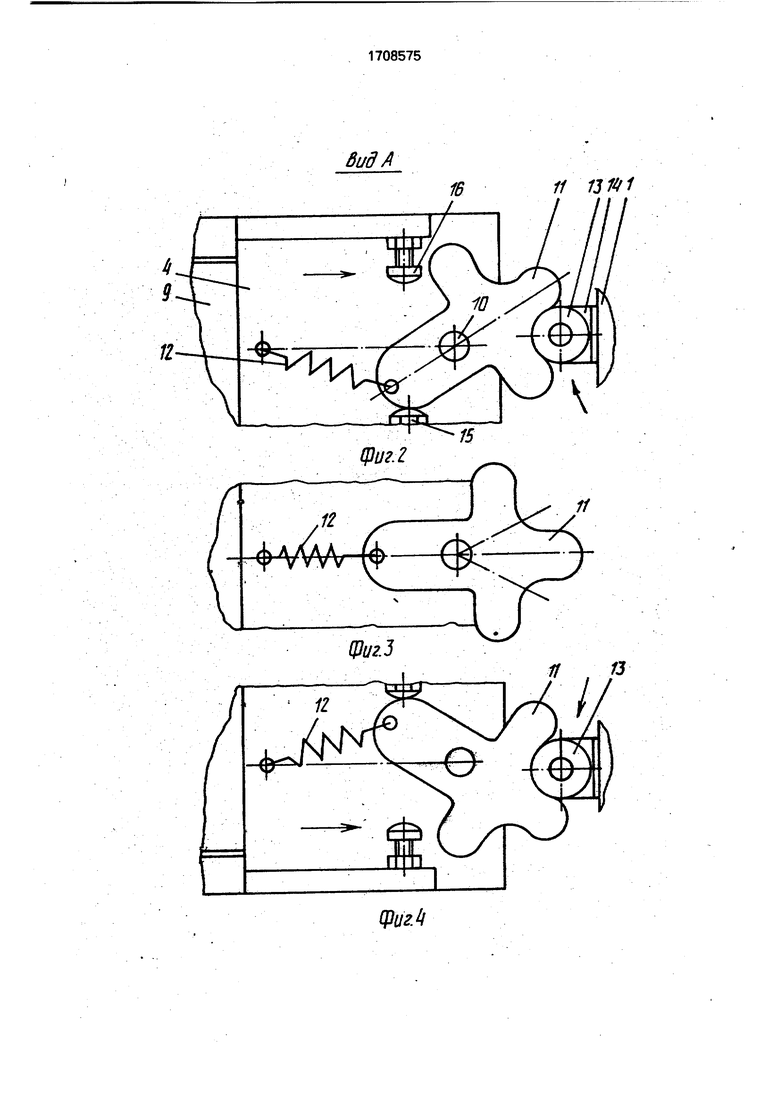
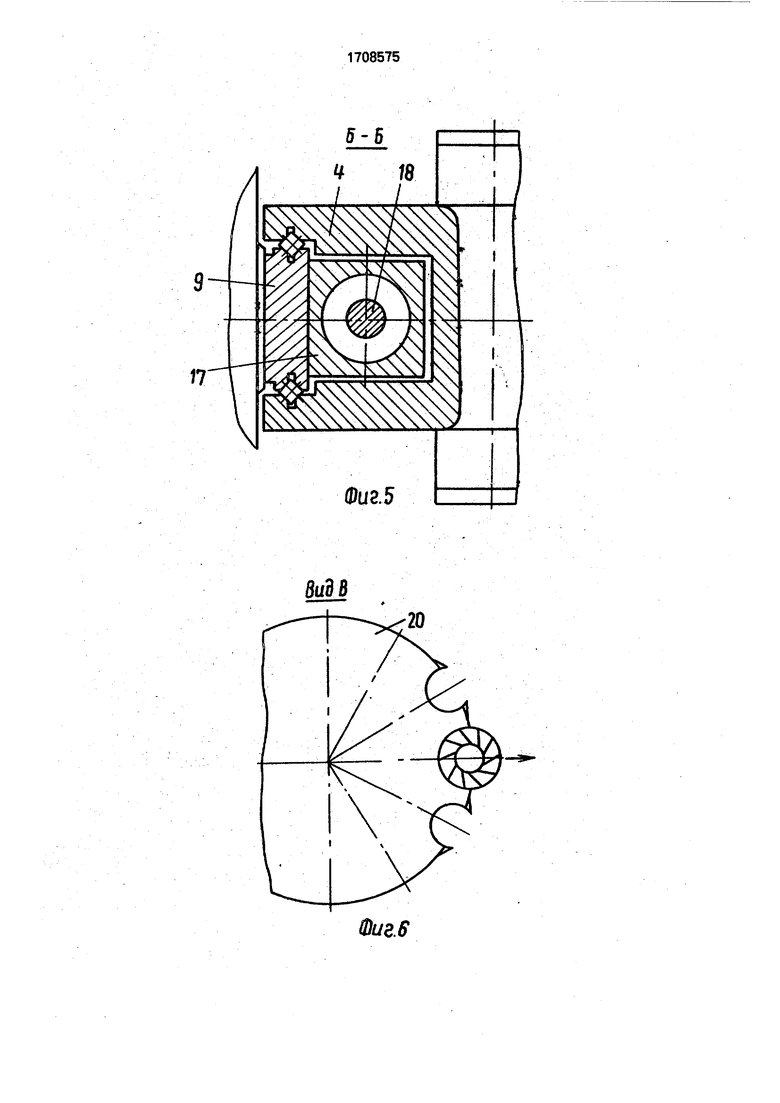
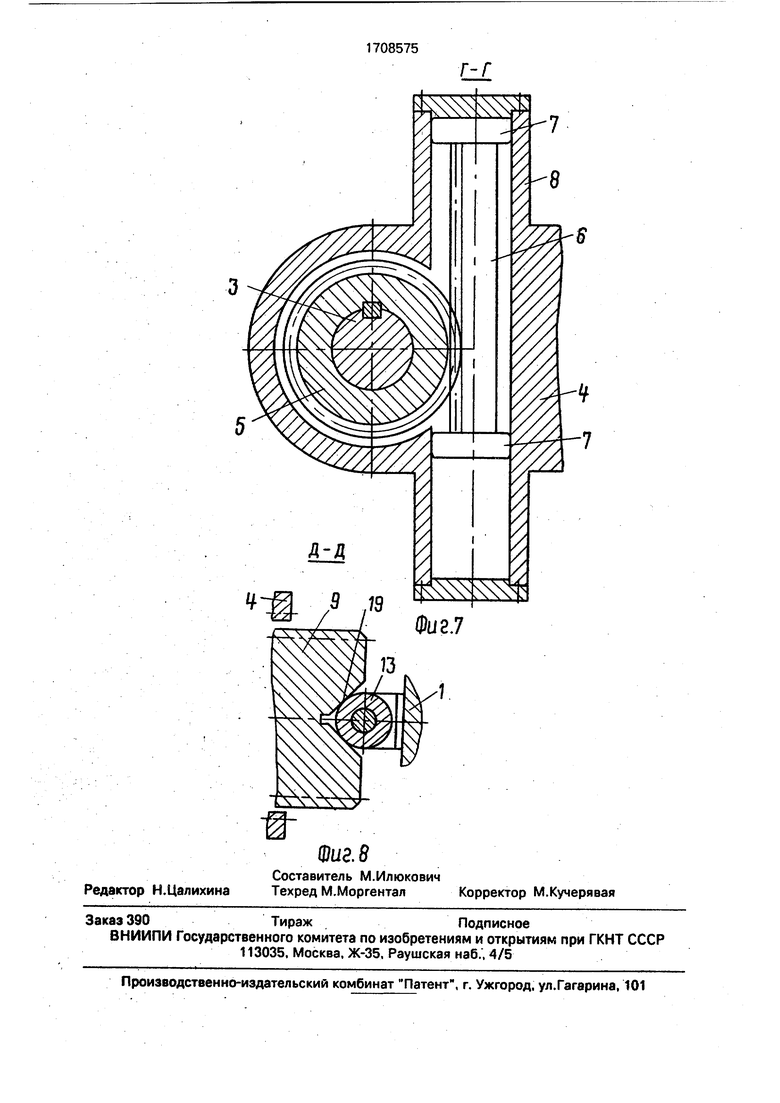
На фиг.1 показан общий вид описываемого устройства; на фйг,2 - вид по стрелке А на фиг.1; на фиг.3,4 - различные положения серьги; на фиг.5 - разрез Б-Б на фиг.1; на фиг.6 вид по стрелке В на фиг, 1; на фиг, - разрез Г-Г на фиг. 1; на фиг.8 - разрез Д-Д на фиг.1.
Устройство содержит механическую руку 1 с захватами 2 под инструменты. Рука 1 закреплена на валу 3,.установленном в корпусе 4 с возможностью вращения. Привод вращения вала 3 выполнен в виде закрепленного на нем зубчатого колеса 5 и зубчатой рейки 6 с плунжерами 7, установленными в силовом цилиндре В. Корпус 4 с возможностью поступательного перемещения установлен на направляющей 9, размещенной на основании, базирующемся на станине станка. На корпусе 4 на оси 10 шарнирно,становлена серьга 11, подпружиненная пружиной 12. Серьга 11 взаимодействует с роликами 13, установленными с возможностью вращения на кронштейнах
14,закрепленных на руке 1. Вращение серьги 11 ограничено регулируемыми упорами
15,16, установленными на корпусе 4. На направляющей 9 закреплен силовой цилиндр 17 со штоком 18, жестко связанным с корпусом 4. В направляющей 9 выполнен паз 19, в котором частично размещается ролик 13..
Устройство работает следующим образом..
Рука 1 в начальный момент времени находится в правом положении (фиг.1). Силовой цилиндр 17 сдвигает корпус 4 с рукой 1
влево и захваты 2 захватывают инструмент, находящийся в магазине 20, и инструмент, находящийся в шпинделе 21 станка. Затем силовой цилиндр 17 сдвигает корпус 4 вправо, при этом серьга 11 находится во взаимодействии с роликом 13, придавая жесткость положению руки 1 относительно корпуса 4. Происходит поворот руки 1 на 180°Ьод действием рейки б, при этом в начале поворота один ролик 13 выходит из взаимодействия с серьгой 11, пружина 12 возвращает серьгу в нейтральнео положение (фиг.З), а затем другой ролик 13 входит в зацепление с серьгой (фиг.4). После зтого корпус 4 сдвигается влево и соответствующие инструменты помещаются в магазин 20 и шпиндель 21. При этом ролик 13 заходит в паз 19, повышая точность фиксации руки 1 относительно корпуса 4.
Формул а изобретени я Устройство для автоматической смены инструмента, содержащее основание с магазином инструментов и направляющей, на которой с возможностью поступательного перемещения установлен корпус с механической рукой, снабженной приводом ее вращения, причем рука закреплена средней частью на валу, установленном в корпусе, а на концах руки с возможностью поочередного взаимрдействия с магазином инструментов установлены захваты, отличающееся тем, что, с целью повышения надежности путем увеличения жесткости положения механической руки, оно снабжено серьгой и роликами, причем серьга установлена на корпусе с возможностью ограниченного поворота и подпружинена относительно корпуса, а ролики установлены на концах руки с возможностью вращения и поочередного взаимодействия с серьгой и дополнительно выполненным в направляющей пазом.
Вид А 11
Шиг.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Устройство для автоматическойСМЕНы иНСТРуМЕНТОВ HA МЕТАллО-РЕжущЕМ CTAHKE | 1978 |
|
SU852163A3 |
| Устройство для автоматической смены инструментов | 1986 |
|
SU1449314A1 |
| Устройство для автоматической смены инструмента | 1986 |
|
SU1421483A1 |
| Манипулятор для автоматической смены инструментов | 1986 |
|
SU1393578A1 |
| Манипулятор для автоматической смены инструмента | 1986 |
|
SU1404247A2 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Автооператор | 1974 |
|
SU554129A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Металлорежущий станок с устройством для автоматической смены инструмента | 1976 |
|
SU657953A1 |

диЭб
20
Фиг.&
| Проспект фирмы Fritz Verner (ФРГ) | |||
| Накаливаемый катод для разрядных трубок | 1925 |
|
SU1686A1 |
