Изобретение относится к манлиностроснию, а именно к захватным устройствам, например, промышленных манипуляторов.
Целью изобретения является повышение надежности захвата детали путем независимого настроечного перемеш,ения захватных рычагов относительно корпуса.
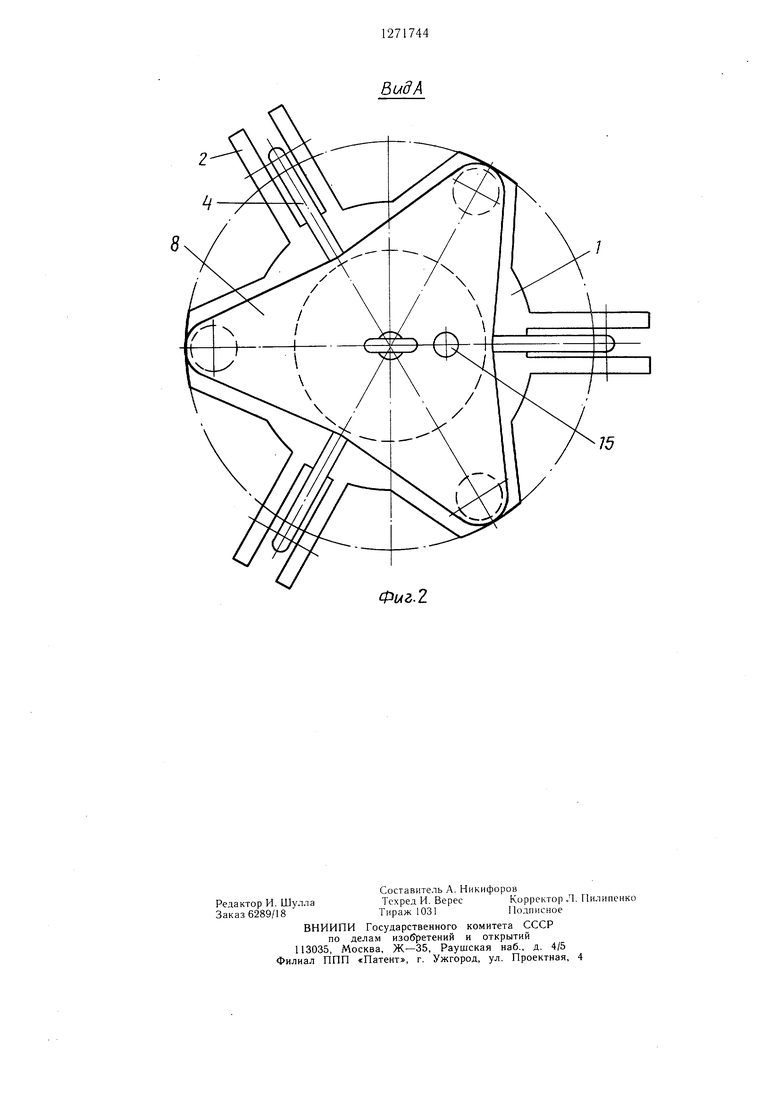
На фиг.1 изображен захват, разрез; па фиг.2 - вид А на фиг.1.
Захват выполнен в виде корпуса 1 с проушинами 2, в которых на осях 3 установлевы три Г-образных захватных рычага 4 с губками 5. Ось 3 каждого захватного рычага 4 имеет возможность эксцентричного установочного перемеш.ения в проушинах 2 корпуса 1 относительно оси захвата. Корпус 1 закреплен на штоке 6 пневмоцилиндра 7. Между корпусом 1 и верхней крышкой 8 пневмоцилиндра 7 установлены пружины 9, которые размешены концентрично по окружности. Нижняя крышка 10 пневмоцилиндра 7 снабжена концентрично расположенными в горизонтальной плоскости пазами 11, в которые входят штифты 12 верхних концов Г-образных рычагов 4. Пневмоцилиндр 7 имеет нижнюю полость 13, которая является рабочей. Верхняя полость 14 пневмоцилиндра 7 сообшена с атмосферой через отверстие 15. Захват зажимает деталь 16.
Захват работает следующим образом.
Когда воздух поступает в нижнюю полость 13 пневмоцилиндра 7, последний опускается и упирается нижней крьипкой 10 в корпус 1, сжимая пружины 9. Нри этом нижняя крышка 0 через пазы 11 воздействует на штифты 12 верхних концов рычагов 4 и разводит нижние концы рычагов 4 с губками 5. Захват готов к приему детали 16. При взятии детали 16 воздух из нижней полости 13 пневмоцилиндра 7 выпускается в атмосферу. Через отверстие 15 в верхней крышке воздух из атмосферы поступает в верхнюю полость 14. Нружины 9 поднимают пневмоцилиндр 7, нижняя крышка 10 с пазами 11 воздействует па верхние концы рычагов 4, поднимая их, при этом нижние концы с губками 5 сжимают деталь 16.
Так как пазы 11 в нижней крышке 10 пневмоцилиндра 7 и оси 3 рычагов 4 расположены в горизонтальной плоскости, то при
эксцентричном перемещении любого рычага 4 не меняется угол поворота и зажимное усилие (соотношение длин плеч остается постоянным) ни при минимальном, ни при максимальном удалении рычагов 4 от оси захвата. Сохранение постоянства зажимного усилия позволяет осуществлять обслуживание хрупких тонкостенных, например, керамических деталей 16 или вязких, например, глиняных деталей И), где необходимо ограничивать давление на единицу юверхности.
Кроме того, каждый из трех рычагов 4 установлен с возможностью эксцентричного перемещения в проупсинах 2 корпуса 1, поэтому обеспечивается захват деталей 16 широкого диапазона диаметров и деталей, конфигурация которых отличается от правильной окружности, например типа эллипс. При последовательном эксцентричном перемеш,ении рычагов 4 ОТНОСИ ельно оси захвата наименьпшй зажимаемый диаметр последующего диапазона лежит внутри предыдущего диапазона, т. е. обеспечивается зажим всех промежуточных диаметров обслуживаемого диапазона, а наибольший зажимаемый диаметр получается при максимальном раздвижении всех трех рычагов 4.
Зажим детали 16 осуществляется за счет усилия пружин 9, что исключает ее выпадывание при падении давления рабочей среды в питающей магистрали.
Формула изобретения
Захват, содержащий корпус, в проушинах которого па осях установлены захватные рычаги, и привод, выполненный в виде силового цилиндра с верхней и нижней крышками и связанный с пружинами, отличающийся тем, что, с целью повышения надежности захвата детали, ось каждого захватногорычага размещена в проушине корпуса с возможностью эксцентричного установочного перемещения, при этом корпус закреплен па штоке силового цилиндра, а пружины размешены концентрично между корпусом и верхней крышкой силового цилиндра, причем в пижней крышке силового цилиндра выполнены концентричные пазы, предназначенные для размещения верхних концов захватных рычагов.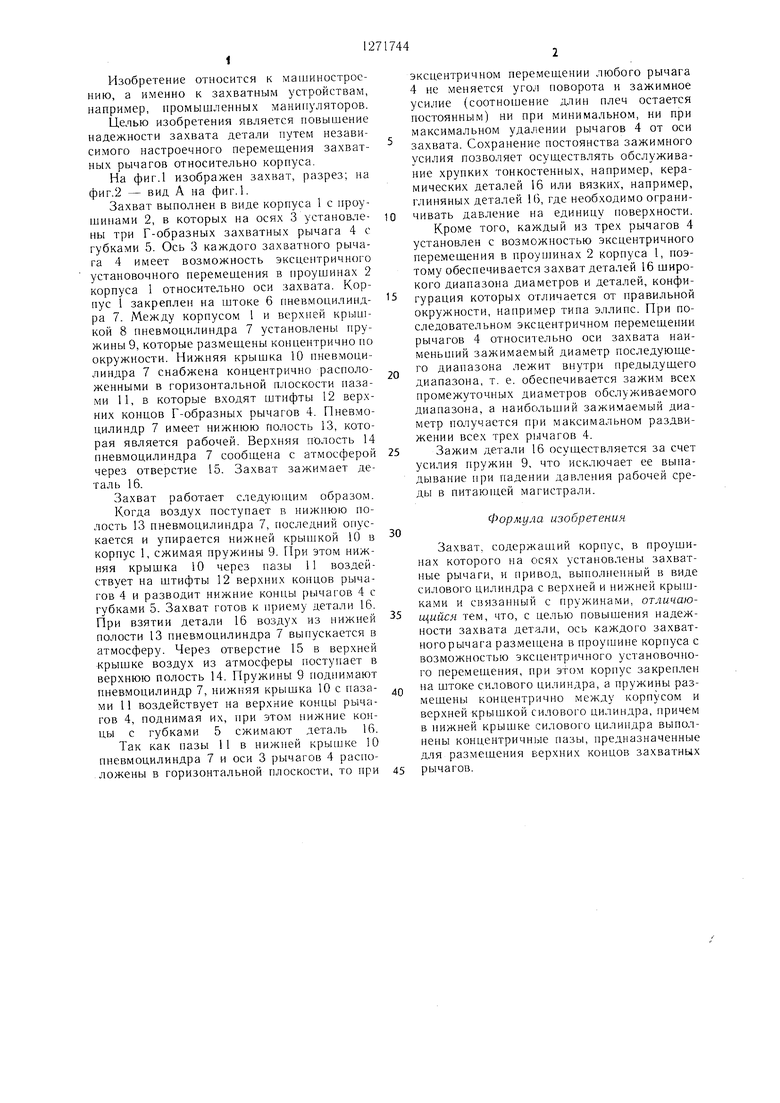
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1980 |
|
SU984861A2 |
| Захват | 1980 |
|
SU905061A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Автооператор | 1981 |
|
SU1028467A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Схват | 1989 |
|
SU1701516A1 |
| Захватное устройство | 1981 |
|
SU1006211A1 |
Изобретение относится к машиностроению, а именно к захватным устройствам, например, промышленных манипуляторов. Изобретение позволяет повысить надежность захвата деталей путем независимого настроечного перемещения захватных рычагов относительно корпуса. Затем содержит корпус 1 с проушинами 2, в которых на осях 3 установлены три Г-образных рычага 4 с губками 5. Ось 3 каждого рычага 4 имеет возможность эксцентричного установочного перемещения в проушинах 2 корпуса 1 относительно оси захвата. Корпус 1 закреплен на щтоке 6 пневмоцилиндра 7. Между корпусом 1и верхней крышкой 8 пневмоцилиндра 7 концентрично установлены пружины 9. В нижней крышке 10 пневмоцилиндра 7 выполнены концентрические пазы 11, в которые входят штифты 12 верхних концов рычагов 4. 2ил. (Л N3 1 4ik
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ | 1993 |
|
RU2085400C1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
