4
О О 00
а
Изобретение относится к металлургическому машиностроению, в частности к машинам непрерывного транспортирования грузов.
Цель изобретения - расширение технологических возможностей конвейера путем обеспечения попарного соединения смежных грузов при транспортировании.
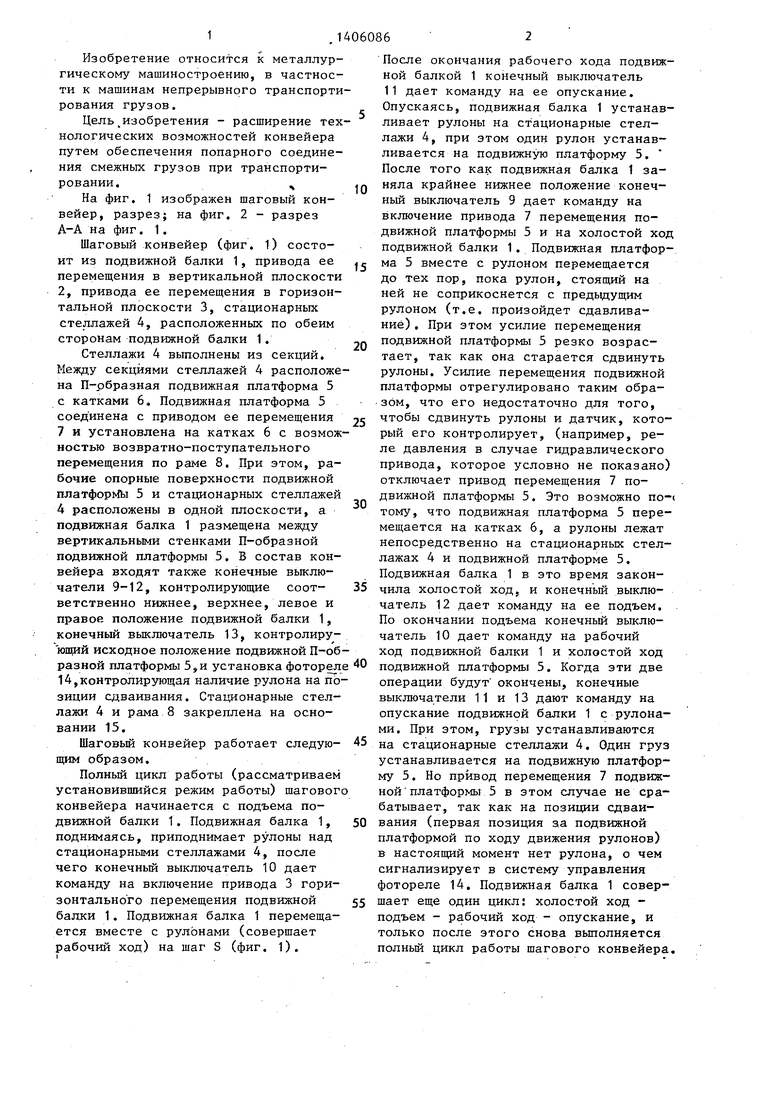
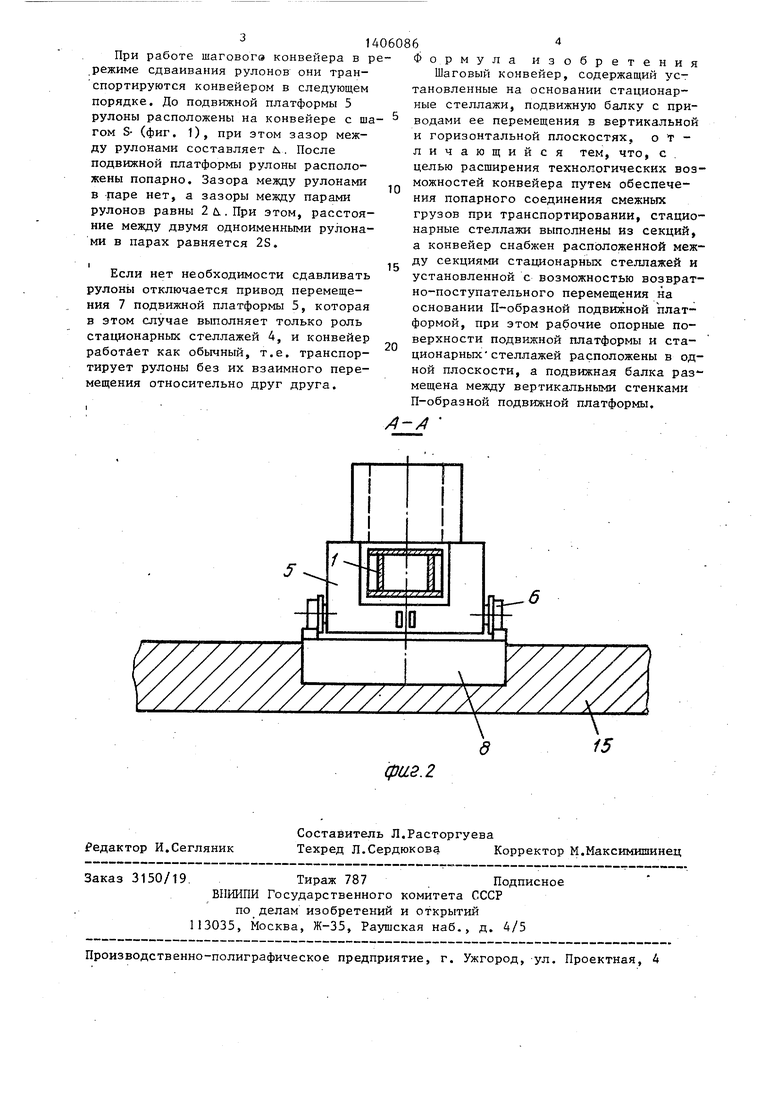
На фиг. 1 изображен шаговый конвейер, разрез; на фиг. 2 - разрез А-А на фиг. 1.
Шаговый конвейер (фиг. 1) состоит из подвижной балки 1, привода ее перемещения в вертикальной плоскости 2, привода ее перемещения в горизонтальной плоскости 3, стационарных стеллажей 4, расположенных по обеим сторонам подвижной балки I.
Стеллажи 4 выполнены из секций. Между секциями стеллажей 4 расположена П-рбразная подвижная платформа 5 с катками 6, Подвижная платформа 5 соединена с приводом ее перемещения 7 и установлена на катках 6 с возможностью возвратно-поступательного перемещения по раме 8. При этом, рабочие опорные поверхности подвижной платфор 5 и стационарных стеллажей 4 расположены в одной плоскости, а подвижная балка 1 размещена между вертикальными стенками П-образной подвижной платформы 5. В состав конвейера входят также конечные выключатели 9-12, контролирующие соот- ветственно нижнее, верхнее, левое и правое положение подвижной балки 1, конечный выключатель 13, контролирующий исходное положение подвижной П-образной платформы установка фоторел 14,контролирзт)щая наличие рулона на позиции сдваивания. Стационарные стеллажи 4 и рама 8 закреплена на основании 15.
Шаговый конвейер работает следую- щим образом.
Полный цикл работы (рассматриваем установившийся режим работы) шаговог конвейера начинается с подъема подвижной балки 1. Подвижная балка 1, поднимаясь, приподнимает рулоны над стационарными стеллажами 4, после чего конечный выключатель 10 дает команду на включение привода 3 горизонтального перемещения подвижной балки 1. Подвижная балка 1 перемещается вместе с рулонами (совершает рабочий ход) на шаг S (фиг. 1).
Q
0
s 5 0
5
0 5
0
После окончания рабочего хода подвижной балкой 1 конечный выключатель 11 дает команду на ее опускание. Опускаясь, подвижная балка 1 устанавливает рулоны на стационарные стеллажи 4, при этом один рулон устанавливается на подвижную платформу 5. После того как подвижная балка 1 заняла крайнее нижнее положение конечный выключатель 9 дает команду на включение привода 7 перемещения подвижной платформы 5 и на холостой ход подвижной балки 1 . Подвижная платформа 5 вместе с рулоном перемещается до тех пор, пока рулон, стоящий на ней не соприкоснется с предыдущим рулоном (т.е. произойдет сдавливание) , При этом усилие перемещения подвижной платформы 5 резко возрастает, так как она старается сдвинуть рулоны. Усилие перемещения подвижной платформы отрегулировано таким образом, что его недостаточно для того, чтобы сдвинуть рулоны и датчик, который его контролирует, (например, реле давления в случае гидравлического привода, которое условно не показано) отключает привод перемещения 7 подвижной платформы 5. Это возможно по- тому, что подвижная платформа 5 перемещается на катках 6, а рулоны лежат непосредственно на стационарных стеллажах 4 и подвижной платформе 5. Подвижная балка 1 в это время закончила холостой ХОД; и конечньй выключатель 12 дает команду на ее подъем. По окончании подъема конечный выключатель 10 дает команду на рабочий ход подвижной балки 1 и холостой ход подвижной платформы 5. Когда эти две операции будут окончены, конечные выключатели 11 и 13 дают команду на опускание подвижной балки 1 с рулонами. При этом, грузы устанавливаются на стационарные стеллажи 4. Один груз устанавливается на подвижную платфор му 5. Но привод перемещения 7 подвижной платформы 5 в этом случае не срабатывает, так как на позиции сдваивания (первая позиция за подвижной платформой по ходу движения рулонов) в настоящий момент нет рулона, о чем сигнализирует в систему управления фотореле 14, Подвижная балка 1 совершает еще один цикл: холостой ход - подъем - рабочий ход - опускание, и только после этого снова вьшолняется полный цикл работы шагового конвейера.
При работе шаговогв конвейера в ре режиме сдваивания рулонов они транспортируются конвейером в следующем порядке. До подвижной платформы 5 рулоны расположены на конвейере с шагом S- (фиг, 1), при этом зазор между рулонами составляет . После подвижной платформы рулоны расположены попарно. Зазора между рулонами в паре нет, а зазоры между парами рулонов равны 2 и.. При этом, расстояние между двумя одноименными рулонами в парах равняется 2S.
Если нет необходимости сдавливать рулоны отключается привод перемещения 7 подвижной платформы 5, которая в этом случае выполняет только роль стационарных стеллажей 4, и конвейер работает как обычный, т.е. транспортирует рулоны без их взаимного перемещения относительно друг друга.
0
5
0
Ф о р мула изобретения
Шаговый конвейер, содержащий установленные на основании стационарные стеллажи, подвижную балку с приводами ее перемещения в вертикальной и горизонтальной плоскостях, отличающийся тем, что, с целью расширения технологических возможностей конвейера путем обеспечения попарного соединения смежных грузов при транспортировании, стационарные стеллажи выполнены из секций, а конвейер снабжен расположенной между секциями стационарных стеллажей и установленной с возможностью возвратно-поступательного перемещения на основании П-образной подвижной платформой, при этом рабочие опорные поверхности подвижной платформы и стационарных стеллажей расположены в одной плоскости, а подвижная балка размещена между вертикальными стенками П-образной подвижной платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1989 |
|
SU1789454A1 |
| Устройство для транспортировки проката | 1990 |
|
SU1774890A3 |
| Шаговый конвейер | 1990 |
|
SU1768475A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ РУЛОНОВ НА СТАН | 1993 |
|
RU2094149C1 |
| Шаговый конвейер | 1982 |
|
SU1062141A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Стеллаж для сыра | 1988 |
|
SU1519600A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| Система складирования продуктов с использованием несущих элементов | 1981 |
|
SU1271369A3 |
Изобретение относится к метал-. лургическому машиностроению, в частности к машинам непрерывного транспортирования грузов. Цель изобретения - расширение технологических возможностей конвейера путем обеспечения попарного соединения смежных грузов при транспортировании. На основании конвейера установлены стационарные стеллажи 4, выполненные из секций. Между секциями стеллажей 4 на основании конвейера возвратно-поступл-тельно перемещается П-образная платформа (П) 5, Рабочие опорные поверхности П и стеллажей 4 расположены в одной плоскости. Между вертикальными стенками П размещена подвижная балка 1 с приводами 2 и 3 ее перемещения в вертикальной и горизонтальной плоскостях. Опускаясь, балка 1 устанавливает рулоны на стеллажи 4, и один рулон на П 5, которая перемещается до тех пор, пока рулон не соприкоснется с предьщущим. Балка 1 совершает рабочий ход, а П 5 - холостой, после чего балка 1 с рулонами опускается. Грузы устанавливаются на стеллажи 4, а один груз - на П 5. Так как на П 5 нет рулона, балка 1 совершает еще один холостой ход. Затем выполняется полный цикл работы шагового конвейера. 2 ил. с S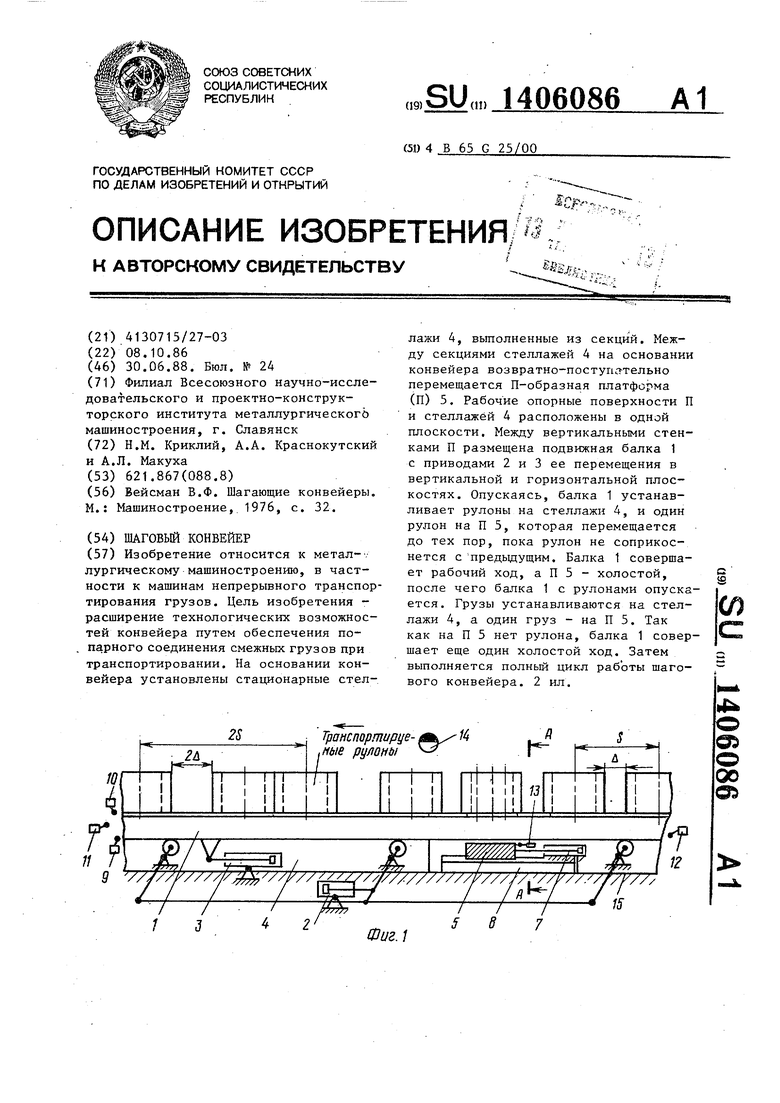
д
15
| Вейсман В.Ф | |||
| Шагающие конвейеры | |||
| М.: Машиностроение, 1976, с | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
