Изобретение относится к металлургическому машиностроению, в частности к машинам непрерывного транспортирования грузов, и может быть использовано в участках подачи и уборки рулонов в агрегатах обработки полосового проката, и является усовершенствованием известного устройства, описанного в а.с. N° 1406086.
Известный шаговый конвейер содержит установленные на основании стационарные стеллажи, выполненные из секций, подвижную балку с приводами ее перемещения, П-образную подвижную платформу расположенную между секциями стационарных стеллажей.
Недостатком известного устройства является то, что оно не может быть применено в участках загрузки рулонами станов холодной прокатки, агрегатов обработки и отделки полосового проката по следующим основным причинам:
- с его помощью рулоны установленные цеховым краном на стационарные стеллажи произвольно в продольном направлении,невозможно расставить в процессе транспортирования с равномерным шагом, выдержав при этом зазоры между смежными рулонами. Это в свою очередь не позволяет устанавливать рулоны на кантователь, не повредив их при этом, без помощи оператора;
- невозможно также изменить направление движения рулонов в процессе транспортирования, не устанавливая при этом дополнительных механизмов.
Целью предлагаемого изобретения является расширение технологических возXI
00
2
ел
можностей конвейера путем обеспечения перемещения, с постоянным шагом изделий с вертикальным сквозным отверстием.
Поставленная цель достигается тем, что шаговый конвейер по а.с. № 1406086, содержащий установленные на основании стационарные стеллажи, выполненные из секций, П-образную подвижную платформу, расположенную между секциями стационарных стеллажей и установленную с возможностью возвратно-поступательного перемещения на основании, подвижную балку с приводами ее перемещения в вертикальной и горизонтальной плоскостях, размещенную между вертикальными стенками П-об- разной подвижной платформы, согласно изобретению. Он снабжен дополнительной подвижной балкой с приводами ее перемещения в вертикальной и горизонтальной плоскостях, установленной с возможностью возвратно-поступательного перемещения между вертикальными стенками П-образ- ной подвижной платформы, и, по меньшей мере, одним фотодатчиком, при этом основная подвижная балка и подвижная платформа выполнены соответственно со сквозным продольным пазом и со сквозным вертикальным отверстием для прохождения луча фотодатчика. Подвижная платформа установлена с возможностью поворота вокруг вертикальной оси.
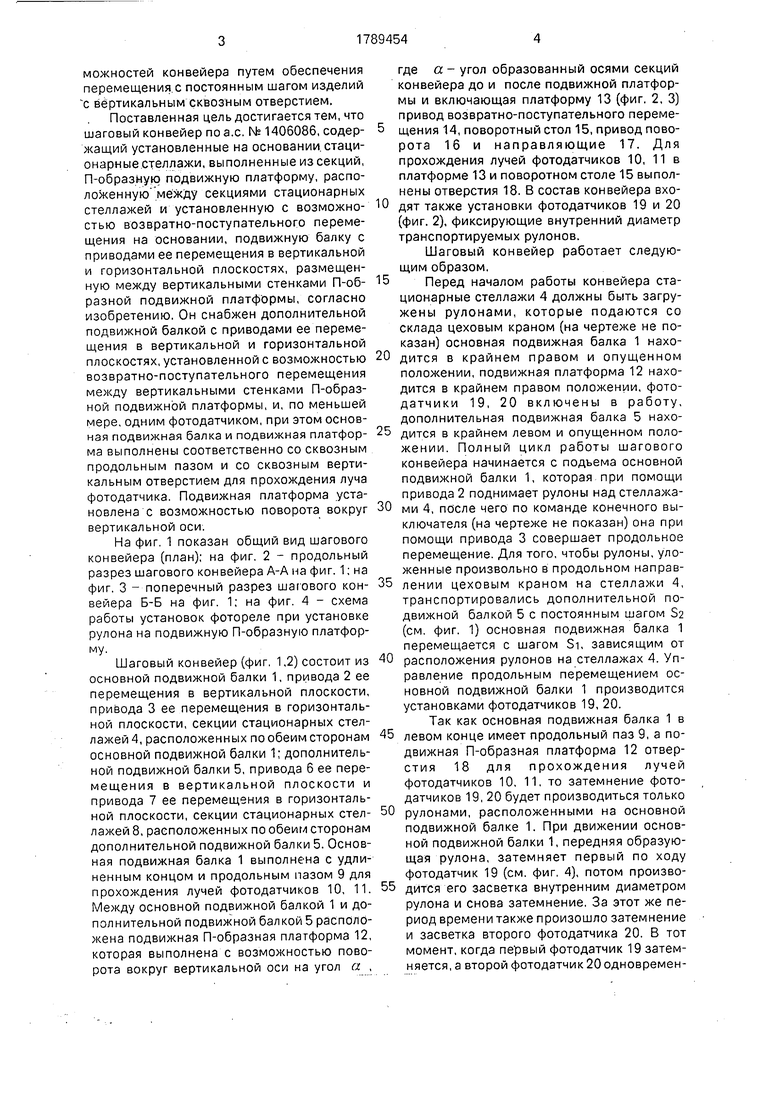
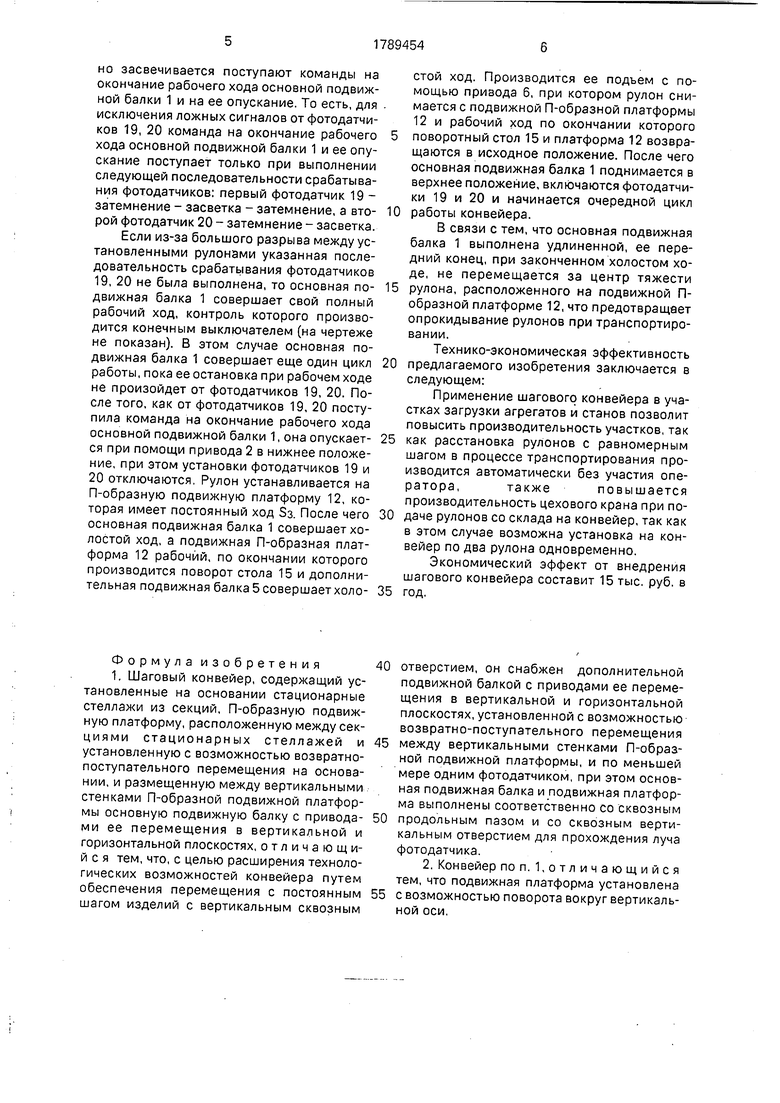
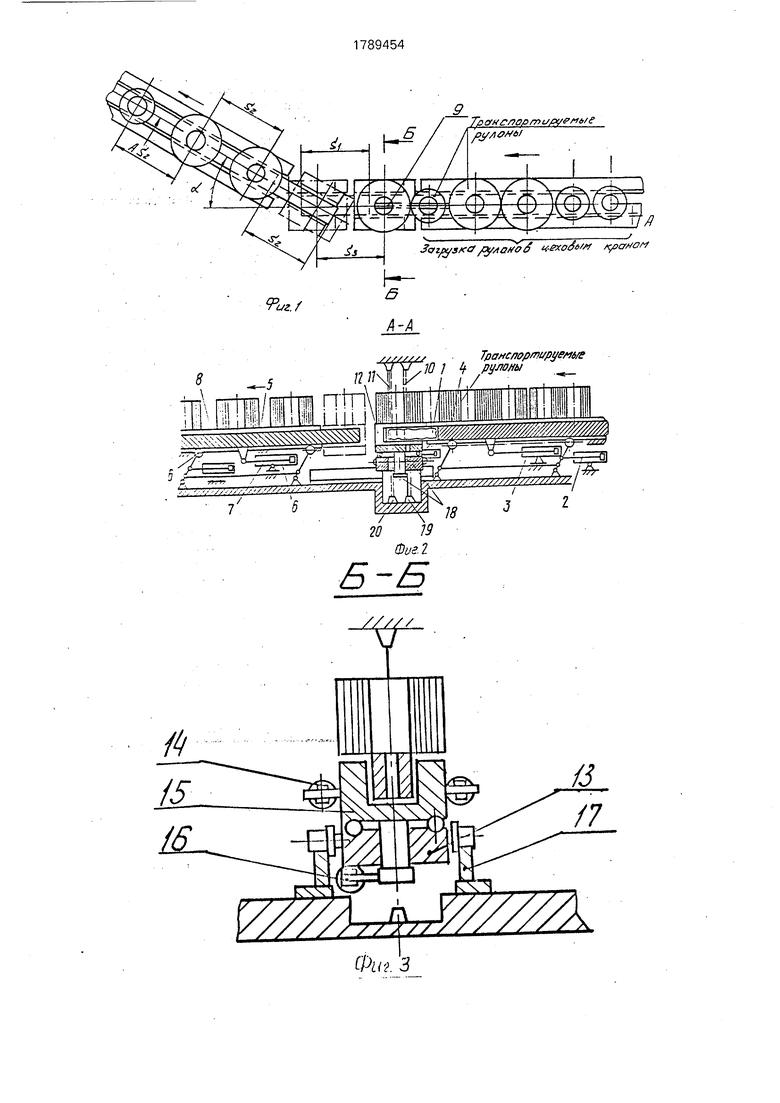
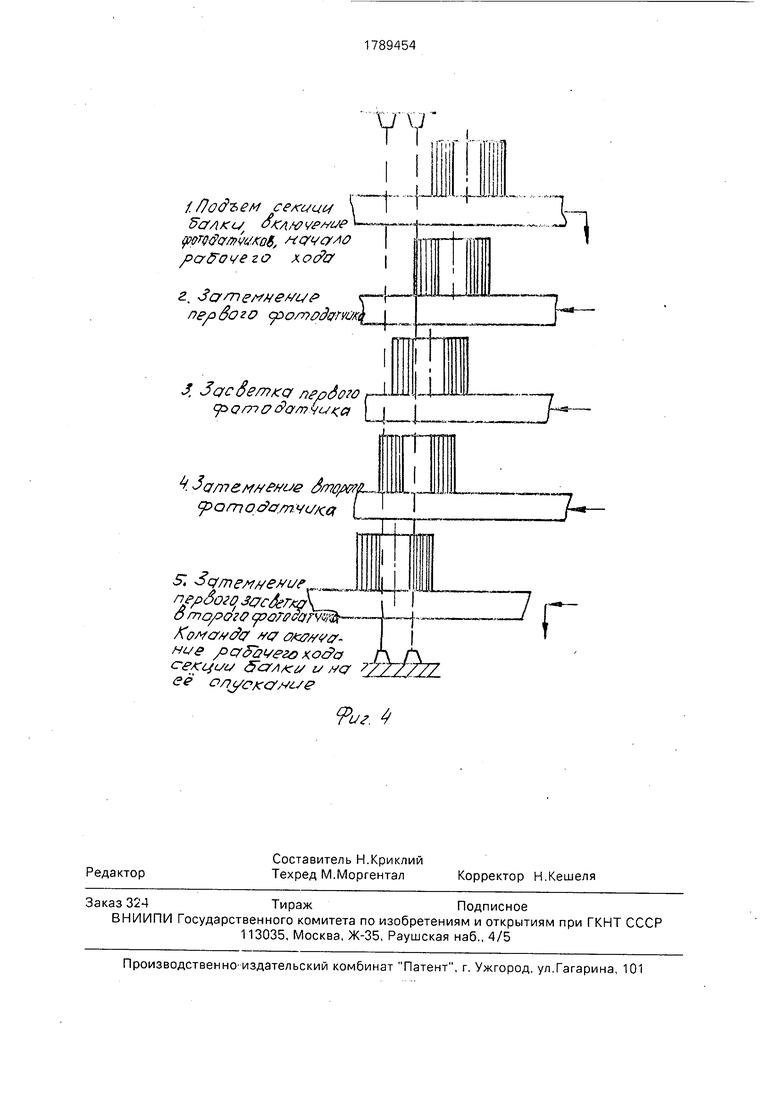
На фиг. 1 показан общий вид шагового конвейера (план); на фиг. 2 - продольный разрез шагового конвейера А-А на фиг. 1; на фиг. 3 - поперечный разрез шагового конвейера Б-Б на фиг. 1; на фиг. 4 - схема работы установок фотореле при установке рулона на подвижную П-образную платформу.
Шаговый конвейер (фиг. 1,2) состоит из основной подвижной балки 1, привода 2 ее перемещения в вертикальной плоскости, привода 3 ее перемещения в горизонтальной плоскости, секции стационарных стеллажей 4, расположенных по обеим сторонам основной подвижной балки 1; дополнительной подвижной балки 5, привода 6 ее перемещения в вертикальной плоскости и привода 7 ее перемещения в горизонтальной плоскости, секции стационарных стеллажей 8, расположенных по обеим сторонам дополнительной подвижной балки 5. Основная подвижная балка 1 выполнена с удлиненным концом и продольным пазом 9 для прохождения лучей фотодатчиков 10, 11. Между основной подвижной балкой 1 и дополнительной подвижной балкой 5 расположена подвижная П-образная платформа 12, которая выполнена с возможностью поворота вокруг вертикальной оси на угол а ,
где а - угол образованный осями секций конвейера до и после подвижной платформы и включающая платформу 13 (фиг. 2, 3) привод возвратно-поступательного перемещения 14, поворотный стол 15, привод поворота 16 и направляющие 17. Для прохождения лучей фотодатчиков 10, 11 в платформе 13 и поворотном столе 15 выполнены отверстия 18. В состав конвейера входят также установки фотодатчиков 19 и 20 (фиг. 2), фиксирующие внутренний диаметр транспортируемых рулонов.
Шаговый конвейер работает следующим образом.
5 Перед началом работы конвейера стационарные стеллажи 4 должны быть загружены рулонами, которые подаются со склада цеховым краном (на чертеже не показан) основная подвижная балка 1 нахо0
5
дится в крайнем правом и опущенном положении, подвижная платформа 12 находится в крайнем правом положении, фотодатчики 19, 20 включены в работу, дополнительная подвижная балка 5 находится в крайнем левом и опущенном положении. Полный цикл работы шагового конвейера начинается с подъема основной подвижной балки 1, которая при помощи привода 2 поднимает рулоны над стеллажа0 ми 4, после чего по команде конечного выключателя (на чертеже не показан) она при помощи привода 3 совершает продольное перемещение. Для того, чтобы рулоны, уложенные произвольно в продольном направ5 лении цеховым краном на стеллажи 4, транспортировались дополнительной подвижной балкой 5 с постоянным шагом $2 (см. фиг. 1) основная подвижная балка 1 перемещается с шагом Si, зависящим от
0 расположения рулонов на стеллажах 4. Управление продольным перемещением основной подвижной балки 1 производится установками фотодатчиков 19, 20.
Так как основная подвижная балка 1 в
5 левом конце имеет продольный паз 9, а подвижная П-образная платформа 12 отверстия 18 для прохождения лучей фотодатчиков 10, 11, то затемнение фотодатчиков 19, 20 будет производиться только
0 рулонами, расположенными на основной подвижной балке 1. При движении основной подвижной балки 1, передняя образующая рулона, затемняет первый по ходу фотодатчик 19 (см. фиг. 4), потом произво5 дится его засветка внутренним диаметром рулона и снова затемнение. За этот же период времени также произошло затемнение и засветка второго фотодатчика 20. В тот момент, когда первый фотодатчик 19 затемняется, а второй фотодатчик 20 одновременно засвечивается поступают команды на окончание рабочего хода основной подвижной балки 1 и на ее опускание. То есть, для исключения ложных сигналов от фотодатчиков 19, 20 команда на окончание рабочего хода основной подвижной балки 1 и ее опускание поступает только при выполнении следующей последовательности срабатывания фотодатчиков: первый фотодатчик 19 - затемнение - засветка - затемнение, а второй фотодатчик 20 - затемнение - засветка. Если из-за большого разрыва между установленными рулонами указанная последовательность срабатывания фотодатчиков 19, 20 не была выполнена, то основная подвижная балка 1 совершает свой полный рабочий ход, контроль которого производится конечным выключателем (на чертеже не показан). В этом случае основная подвижная балка 1 совершает еще один цикл работы, пока ее остановка при рабочем ходе не произойдет от фотодатчиков 19, 20. После того, как от фотодатчиков 19, 20 поступила команда на окончание рабочего хода основной подвижной балки 1, она опускается при помощи привода 2 в нижнее положение, при этом установки фотодатчиков 19 и 20 отключаются. Рулон устанавливается на П-образную подвижную платформу 12, которая имеет постоянный ход 5з. После чего основная подвижная балка 1 совершает холостой ход, а подвижная П-образная платформа 12 рабочий, по окончании которого производится поворот стола 15 и дополнительная подвижная балка5совершаетхолостой ход. Производится ее подъем с помощью привода 6, при котором рулон снимается с подвижной П-образной платформы 12 и рабочий ход по окончании которого
поворотный стол 15 и платформа 12 возвращаются в исходное положение. После чего основная подвижная балка 1 поднимается в верхнее положение, включаются фотодатчики 19 и 20 и начинается очередной цикл
работы конвейера.
В связи с тем, что основная подвижная балка 1 выполнена удлиненной, ее передний конец, при законченном холостом ходе, не перемещается за центр тяжести
рулона, расположенного на подвижной П- образной платформе 12, что предотвращает опрокидывание рулонов при транспортировании.
Технико-экономическая эффективность
предлагаемого изобретения заключается в следующем:
Применение шагового конвейера в участках загрузки агрегатов и станов позволит повысить производительность участков, так
как расстановка рулонов с равномерным шагом в процессе транспортирования производится автоматически без участия оператора,также повышается производительность цехового крана при подаче рулонов со склада на конвейер, так как в этом случае возможна установка на конвейер по два рулона одновременно.
Экономический эффект от внедрения шагового конвейера составит 15 тыс. руб. в
год.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1986 |
|
SU1406086A1 |
| Устройство для транспортировки проката | 1990 |
|
SU1774890A3 |
| Шаговый конвейер | 1990 |
|
SU1768475A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ РУЛОНОВ НА СТАН | 1993 |
|
RU2094149C1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Укладчик листов в пакеты на поддоны | 1979 |
|
SU821356A1 |
| Устройство для упаковки в металлическую обертку рулонов | 1983 |
|
SU1137019A1 |
| Механизированный склад-накопитель штучных грузов | 1988 |
|
SU1648852A1 |
| Поточная линия для сборки и сварки рамных металлоконструкций | 1975 |
|
SU919842A1 |
| Система складирования продуктов с использованием несущих элементов | 1981 |
|
SU1271369A3 |
Использование: изобретение относится к металлургическому машиностроению, в частности к машинам непрерывного транспортирования грузов, и может быть использовано в участках подачи и уборки рулонов в агрегатах обработки полосового проката. Цель изобретения - расширение технологических возможностей конвейера путем обеспечения перемещения с постоянным шагом изделий с вертикальным сквозным отверстием. Сущность изобретения: шаговый конвейер, содержит стационарные стеллажи 4, выполненные из секций, П-об- разную подвижную платформу 12, подвижную балку 1 с приводами 2,3 ее перемещения в вертикальной и горизонтальной плоскостях. Новым в устройстве является то, что конвейер снабжен дополнительной подвижной балкой 5 с приводом 6 ее перемещения в вертикальной плоскости и приводом 7 ее перемещения в горизонтальной плоскости, установленной с возможностью возвратно-поступательного перемещения между вертикальными стенками П-образной подвижной платформы 13. Подвижная платформа 12 установлена с возможностью поворота вокруг вертикальной оси. 1 з.п. ф-лы, 4 ил. ел С
Формула изобретения 1. Шаговый конвейер, содержащий установленные на основании стационарные стеллажи из секций, П-образную подвижную платформу, расположенную между сек- циями стационарных стеллажей и установленную с возможностью возвратно- поступательного перемещения на основании, и размещенную между вертикальными стенками П-образной подвижной платформы основную подвижную балку с приводами ее перемещения в вертикальной и горизонтальной плоскостях, отличающийся тем, что, с целью расширения технологических возможностей конвейера путем обеспечения перемещения с постоянным шагом изделий с вертикальным сквозным
отверстием, он снабжен дополнительной подвижной балкой с приводами ее перемещения в вертикальной и горизонтальной плоскостях, установленной с возможностью возвратно-поступательного перемещения
между вертикальными стенками П-образной подвижной платформы, и по меньшей мере одним фотодатчиком, при этом основная подвижная балка и подвижная платформа выполнены соответственно со сквозным
продольным пазом и со сквозным вертикальным отверстием для прохождения луча фотодатчика.
с возможностью поворота вокруг вертикальной оси.
Фш. 3
. O(J/I teSVHeWUC- Ъ Г
первого
vf 3q cSe/7 K y педбого (7/77 г Ъ /77у2/ й ) )I
1ГТ
9иг. 4
т/и
у
II Тп-
ш
| Шаговый конвейер | 1986 |
|
SU1406086A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
