8идА
(Л
с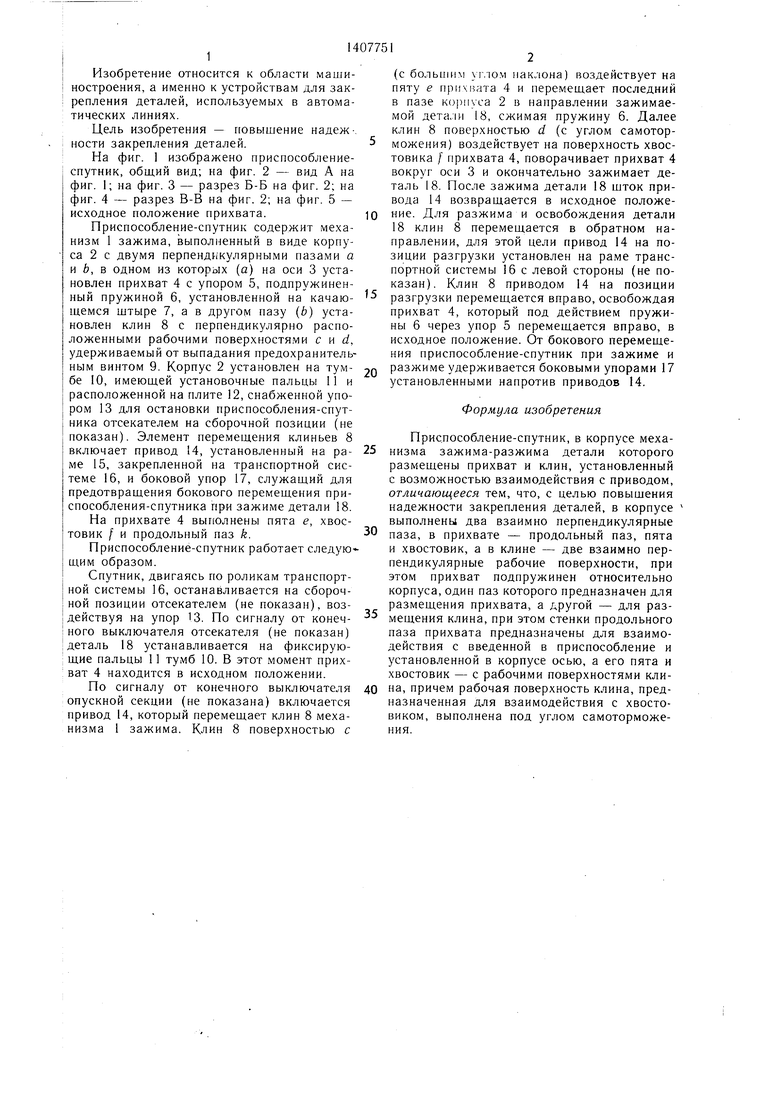
| название | год | авторы | номер документа |
|---|---|---|---|
| Металлорежущий станок | 1990 |
|
SU1830333A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ ДЕТАЛЕЙ | 1971 |
|
SU312733A1 |
| Технологический спутник | 1989 |
|
SU1683951A1 |
| Приспособление-спутник | 1989 |
|
SU1673367A1 |
| Автоматическая линия преимущественно для сборки и клепки дисков сцепления | 1981 |
|
SU977135A1 |
| Многопозиционное поворотное приспо-СОблЕНиЕ | 1979 |
|
SU837736A1 |
| Технологический спутник | 1986 |
|
SU1400847A1 |
| Способ загрузки токарных полуавтоматов деталями для их двусторонней обработки и автоматическая линия для его осуществления | 1988 |
|
SU1662807A1 |
| Приспособление-спутник | 1983 |
|
SU1169801A1 |
| Линия спутникового типа | 1989 |
|
SU1646798A1 |

Изобретение относится к области машиностроения, а именно к устройствам для закрепления деталей, используемых в автоматических линиях и позволяет ПОЕ5ЫСИТЬ надежность закрепления деталей путем выполнения в корпусе двух взаимно перпендикулярных пазов для размещения прихвата с продольным пазом, пятой и хвостовиком и клина с двумя взаимно перпендикулярными рабочими поверхностями. В корпусе 2 с двумя взаимно перпендикулярными пазами а и 1 на оси 3 установлен прихват 4 с продольным пазом k, пятой е и хвостовиком / и к.-щн 8 с двумя взаимно перпендикулярными рабочими поверхностями. Клин 8 установлен с возможностью взаимодействия с приводом. Прихват 4 подпружинен пружиной 6. установленной на качаюпюмся штыре 7, п закрепляет деталь 18. 5 ил.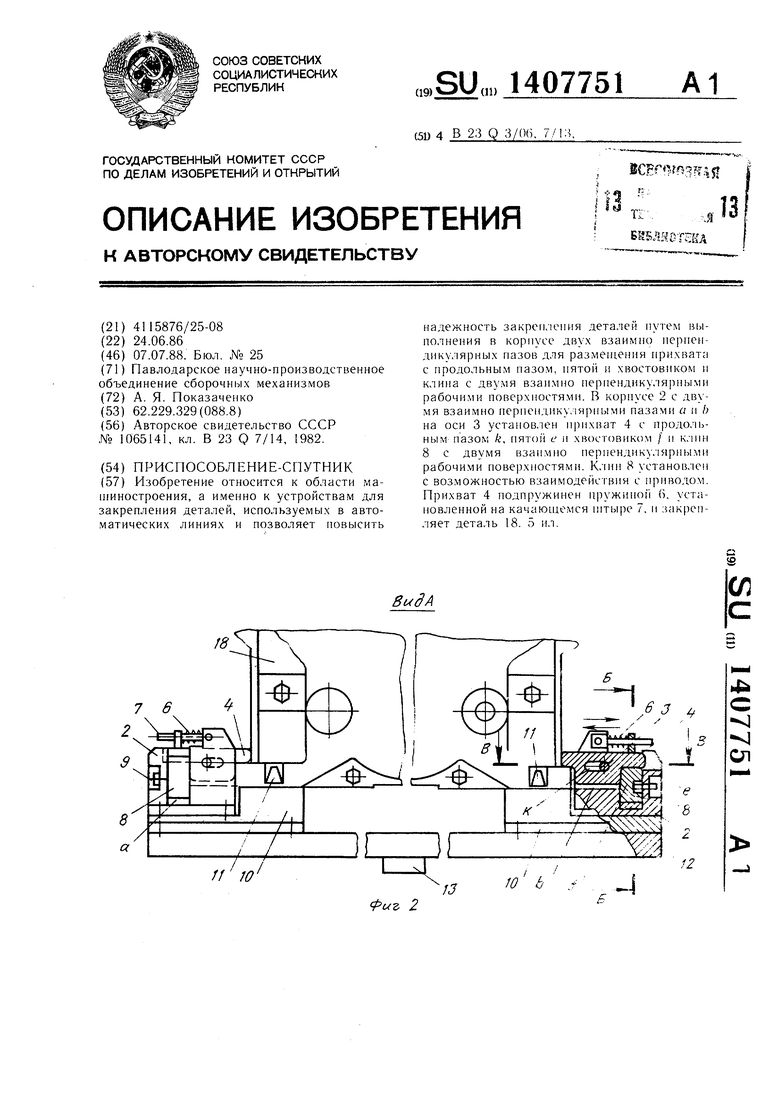
фиг 2
Изобретение относится к области машиностроения, а именно к устройствам для закрепления деталей, используемых в автоматических линиях.
Цель изобретения - г овышение надежности закрепления деталей.
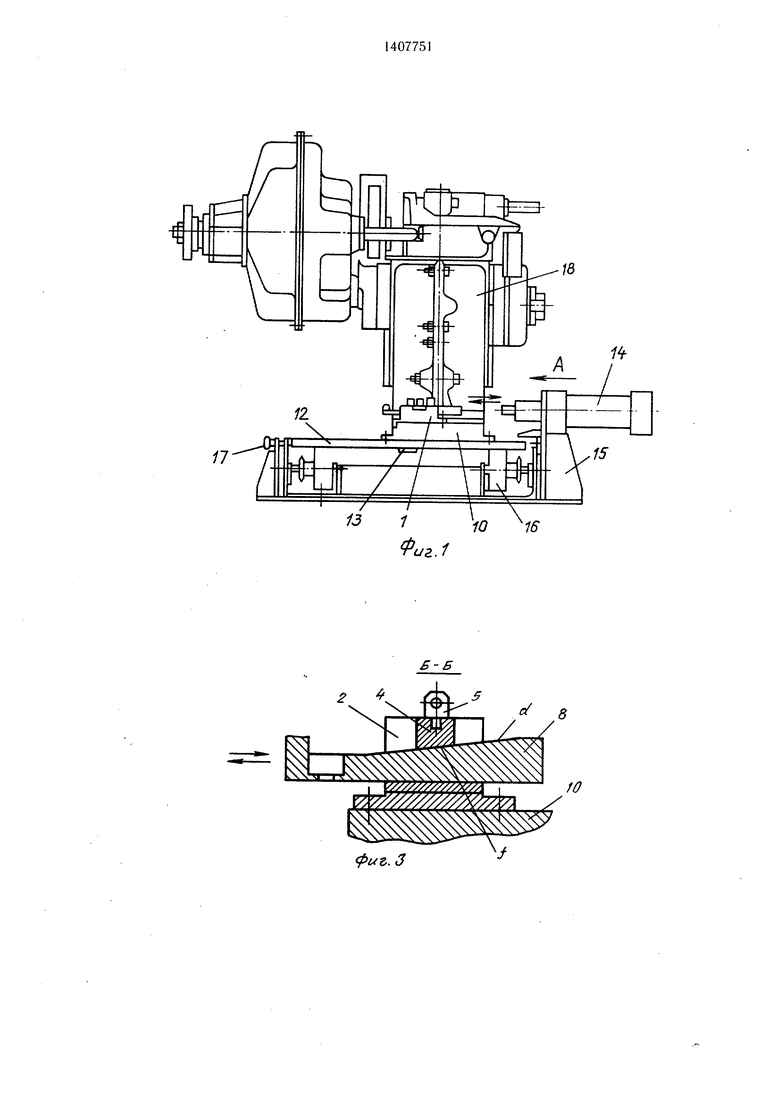
На фиг. 1 изображено приспособление- спутник, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 -- исходное положение прихвата.
Приспособление-спутник содержит механизм 1 зажима, выполненный в виде корпуса 2 с двумя перпендикулярными пазами а и и, в одном из которых (а) на оси 3 установлен прихват 4 с упором 5, подпружиненный пружиной 6, установленной на качаю- щемся штыре 7, а в другом пазу (Ь) установлен клин 8 с перпендикулярно расположенными рабочими поверхностями с d, удерживаемый от выпадания предохранительным винтом 9. Корпус 2 установлен на тум- бе 10, имеющей установочные пальцы 11 и расположенной на плите 12, снабженной упором 13 для остановки приспособления-спутника отсекателем на сборочной позиции (не показан). Элемент перемещения клиньев 8 включает привод 14, установленный на ра- ме 15, закрепленной на транспортной системе 16, и боковой упор 17, служащий для предотвращения бокового перемещения приспособления-спутника при зажиме детали 18.
На прихвате 4 выполнены пята е, хвосI-о/
товик / и продольный паз к.
Приспособление-спутник работает следую щим образом.
Спутник, двигаясь по роликам транспортной системы 16, останавливается на сборочной позиции отсекателем (не показан), воздействуя на упор 13. По сигналу от конеч- ного выключателя отсекателя (не показан) деталь 18 устанавливается на фиксирующие пальцы 11 тумб 10. В этот момент прихват 4 находится в исходном положении.
По сигналу от конечного выключателя опускной секции (не показана) включается привод 14, который перемещает клин 8 механизма 1 зажима. Клин 8 поверхностью с
(с большим iMOM наклона) воздействует на пяту е при)ата 4 и перемещает последний в пазе корпуса 2 в направлении зажимаемой дета,1И 18, сжимая пружину 6. Далее клин 8 поверхностью d (с углом самоторможения) воздействует на поверхность хвостовика / прихвата 4, поворачивает прихват 4 вокруг оси 3 и окончательно зажимает деталь 18. После зажима детали 18 шток привода 14 возвращается в исходное положение. Для разжима и освобождения детали 18 клин 8 перемещается в обратном направлении, для этой цели привод 14 на позиции разгрузки установлен на раме транспортной системы 16 с левой стороны (не показан). Клин 8 приводом 14 на позиции разгрузки перемещается вправо, освобождая прихват 4, который под действием пружины 6 через упор 5 перемещается вправо, в исходное положение. От бокового перемещения приспособление-спутник при зажиме и разжиме удерживается боковыми упорами 17 установленными напротив приводов 14.
Формула изобретения
Приспособление-спутник, в корпусе механизма зажима-разжима детали которого размещены прихват и клин, установленный с возможностью взаимодействия с приводом, отличающееся тем, что, с целью повышения надежности закрепления деталей, в корпусе выполнены два взаимно перпендикулярные паза, в прихвате - продольный паз, пята и хвостовик, а в клине - две взаимно перпендикулярные рабочие поверхности, при этом прихват подпружинен относительно корпуса, один паз которого предназначен для размещения прихвата, а другой - для размещения клина, при этом стенки продольного паза прихвата предназначены для взаимодействия с введенной в приспособление и установленной в корпусе осью, а его пята и хвостовик - с рабочими поверхностями клина, причем рабочая поверхность клина, предназначенная для взаимодействия с хвостовиком, выполнена под углом самоторможения.
8
fO
Ш
фиг,.3
V
П
/
/
/
10
7
Фиг.. 5
игЛ
5
6
Ш
-х...
| Способ изготовления диэлектрического слоя для мозаичных фотоэлектродов | 1939 |
|
SU65141A3 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
