tUBsci
оэ
00
1U
Изобретение относится к автоматическому контролю и учету работы зкскаваторов-драглайнов, испольэуе- |мых при ведении открытых горных работ.
: Цель изобретения - повышение точности определения технологическю : циклов экскавации,
На фиг. 1 схематично Доказано расположение кузова, стрелы экскаватора и линий, поясняющих сущность предлагаемого способа; на фиг 2 - функциональная схема устройства, реапизую- щего способ определения показателей работы экскаватора-драглайна.
Используют координатную зависимость расположения линии начала разгрузки и разгрузки (фиг, 1) с линия- 1 массовых коэффициентов пропорциональности К...К, между разностью статических усилий в канатах,подъема тяги и массой ковша. При движении ковша на разгрузку по любой траектории, например Л или Л, ковш всегда пересекает вначале только линии массовых коэффициентов К, затем следующие друг за другом линии начала разгрузки и линии разгрузки. Местополо жение ковша на линии разгрузки фиксируется в момент вьиолдекня условия
t Fndt 7 С . 10 о .
Исходя из этого, следует на каждом временном интервале (фиг. 1) определять и последовательно фиксиро- Ba i b столько значений 1,4 (У - - S ), сколько необходимо для возврата на результат с;-;заданным массовым коэффициентом Кг Ij, относительно линии разгрузки (на фкг.1 их четыре).
Измеряют абсолютньй угол поворота стрелы з-кскаватора в плане ведения горных работ и с помощью его задают абсолютные углы загрузки с( j разгрузки d KOBiiia. При этом углы загрузки и разгрузки ковша могут быть заданы с помощью минимальных , jVuH и максимальных о(„„;,с J««KC углов, абсолютньш угол поворота определяется по магнитным силовым линиям
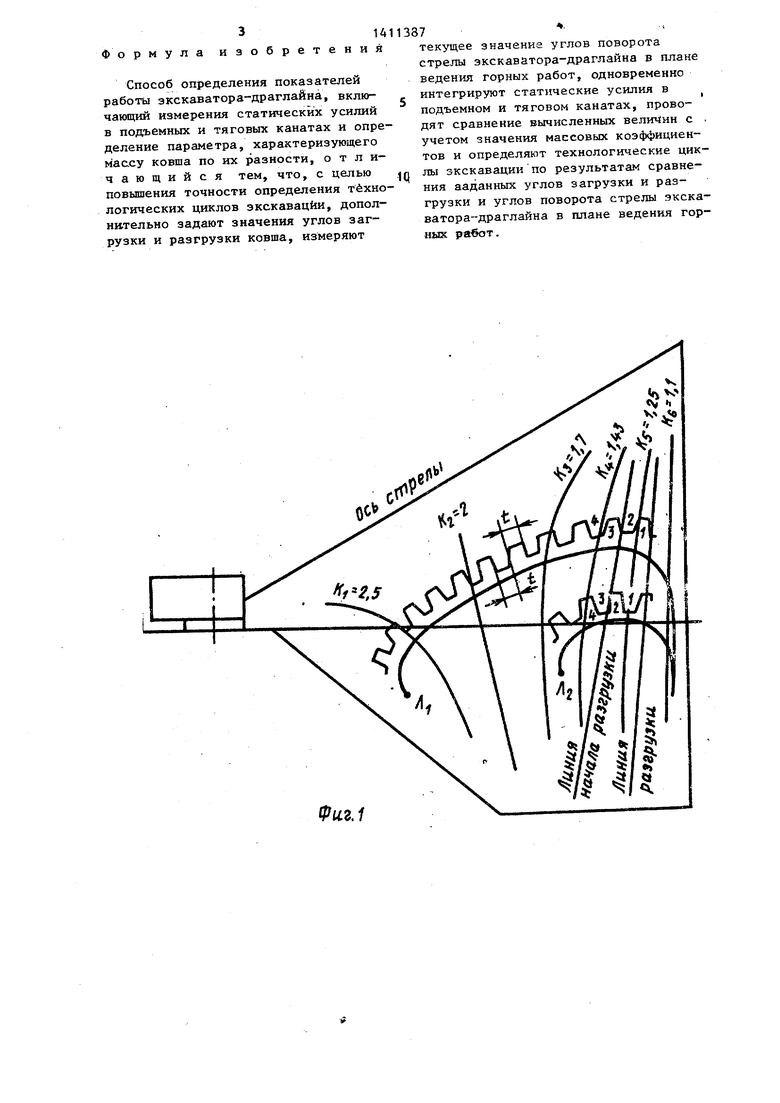
Функциональная схема устройства для осуществления способа (фиг. 2) содержит интеграторы 1 ч 2, схемы 3 и 4 сравнения, блок 5 чаДания углов загрузки и разгрузки, элементы 6-8 памяти операций цикла, схемы вычита3872
ния 9 и умножения 10, блок 11 стековой памяти и блок 12 учета.
По цепи 13 и 14 в блоки Т и 2 по- ступают сигналы, пропорциональные , . статическим усилиям в подъемном (F ) и в тяговом (F) канатах.
Устройство работает следующим образом.
0 В начале работы экскаватора задают углы загрузки и разгрузки ковша с помощью фиксации абсолютных углов поворота стрелы экскаватора соответственно в зонах забоя и отвала, а во 5 время работы сравнивают текущий абсолютньй угол поворота стрелы экскава- .тора с заданными углами загрузки и разгрузки и формируют сигналы при выполнении условий , . Сиг- 0 налы статических усилии в канатах подъема и тяги интегрируются в течение выбранного времени t с масштаб- ными коэффиддаентами (1, с) в интег- .раторах 1 и2и сравниваются схемой 3. 5 На первом ее выходе появляется сигнал .Черпание при условии rF -dt- If, if. j втором выходе - сиг
f . . . и .
нал Перенос ковша при условии 0 . f п г ) третьем выходе
и °
сигнал Разгрузка -
4 ff,dt -7 С.| F.,d
при условии Элемент 6 памяти
; фиксирует операцию Черпание при 5 совпадении сигналов Черпание iTpa- венства с/ и готовит к работе элемент 7 памяти, который срабатывает при поступлении сигнала Перенос ковша на его первый вход. Элемент 0 7 памяти своим выходом готовит к работе ,элемент 8 памяти и приводит в исходное состояние элемент 6 памяти. Элемент 8 памяти фиксирует операцию Разгрузка при совпадении сигналов Разгруз- (. ка и равенства о( /. .
Сигнал с выхода элемента 8 памяти возвращает в исходное состояние эле- мент 7 памяти, добавляет один импульс. в счетчик числа циклов в блоке 12 учета и разрешает выдачу массы ковша из блока стековой памяти в блок учета. Возврат элемента В памяти в ис- ходное состояние происходит автоматически.
Таким образом, в блоке 12 учета накапливается информация суммарной массы переработанной горной массы и- числа произведенных о,иклов экскавации в соответствии с за;:.т,анной технологией.
514
Формула изобретения
Способ определения показателей работы экскаватора-драглайна, вклю- чаюпщй измерения статических усилий в подъемных и тяговых канатах и определение параметра, характеризующего массу ковша по их разности, отличающийся тем, что, с целью повышения точности определения технологических циклов экскавации, дополнительно задают значения углов загрузки и разгрузки ковша, измеряют
7
текущее значениг углов поворота стрелы экскаватора-драглайна в плане ведения горных работ, одновременно
интегрируют статические усилия в подъемном и тяговом канатах, проводят сравнение вычисленных величин с . учетом значения массовых коэффициентов и определяют технологические циклы экскавации по результатам сравнения ааданных углов загрузки и разгрузки и углов поворота стрелы экскаватора-драглайна в плане ведения горных работ.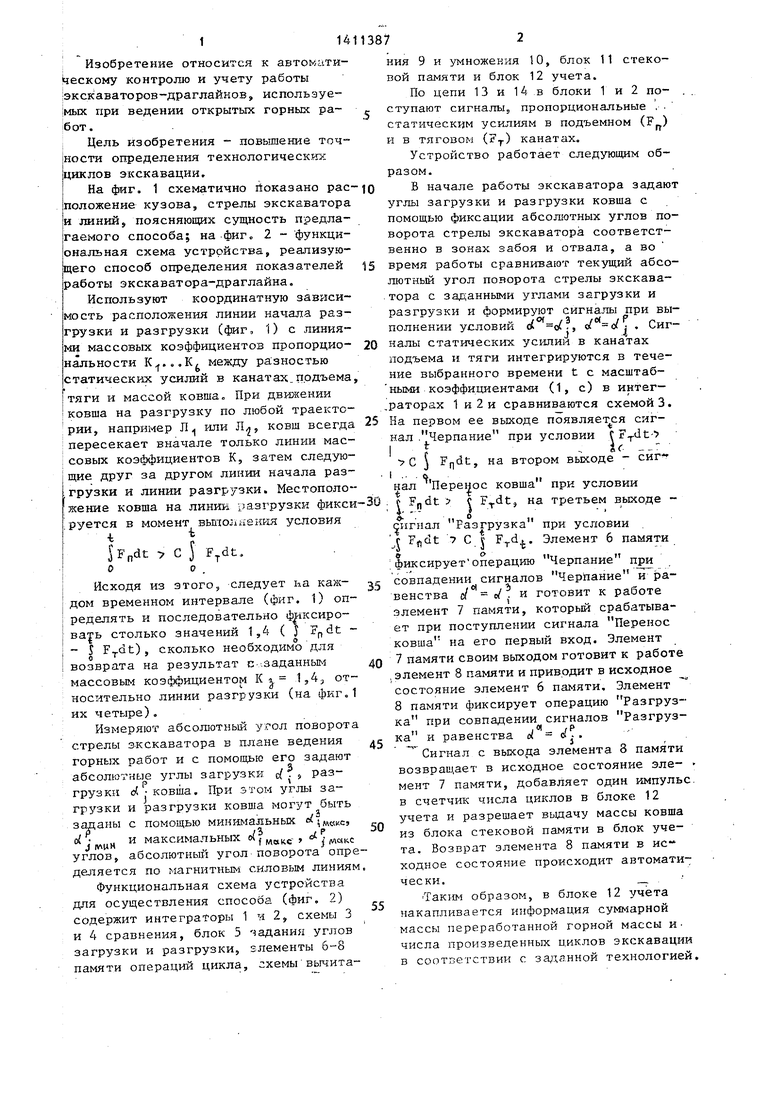
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ измерения количества работы выполненной экскаватором-драглайном | 1982 |
|
SU1097765A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ автоматического учета основных показателей работы драглайна | 1986 |
|
SU1421830A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
| Устройство для измерения работы экскаватора драглайна | 1976 |
|
SU737575A2 |
Фаг,1
| Максимов А.П | |||
| Способ определения веса ковша экскаватора-драглайна: Известия вузов | |||
| - Горный журнал,1977, № 3, с | |||
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
| Способ определения массы ковша экскаватора-драглайна | 1978 |
|
SU861485A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
