|4
NBA
00 СП
««te./
Изобретение относится к автоматическому управлению производственными процессами и может быть применено в цифровых системах автоматического управления позиционированием различных перемещающихся объектов.
Целью изобретения является повышение быстродействия и обеспечение более плавно го торможения,
На фиг. 1 представлена блок-схема цифровой системы программного управления; на фиг. 2 - функциональная схема блока выделения старшего разряда; на фиг. 3 - функциональная схе ма блока вьщеления двух старших разрядов; на фиг. 4 - зависимость амплитуды аналогового сигнала А на выходе преобразователя двоичщ.1й код - напряжение от кода разности Л8 заданного и текущего положений объекта
Система содержит (фиг. 1) блок 1 задания программы, сумматор 2 на 2п + р разрядов, первый элемент ИЛИ 3, блок 4 выделения старшего разряда, блок 5 выделения- старших разрядов, блок злементов ИЛИ, содержащий с второго 6.1 по (п+2)-й 6.(п+1) элементы ИЛИ, преобразователь 7 двоичный код -напряжение на п+2 разрядов, усилитель 8, блок управления 9 и датчик 10 обратной связи.
Блок 4 выделения старшего разряда на пять входов и пять выходов (фиг, 2) содержит с первого по четвертый элементы И11-И14.
Блок 4 вьщеления старшего разряда на 2п+1 вход и 2п+1 выход может быть выполнен аналогично приведенному на фиг. 2, т.е. содержит с первого по 2п-й элементы И, при этом прямые входы с первого по 2п-й злемент И этого блока соединены соответственно с входами с первого по 211-й блока 4, с первого по 2п-й инверсны входы первого элемента И соединены соответственно с входами с второго по (2п+1)-й блока 4, с первого по (2п-1)-й инверсные входы второго элемента И соединены соответственно с входами с третьего по (2п+1)-й блока 4, с первого по (2п-2)-й инверсные входы третьего элемента И соединены соответственно с входами четвертого по (2п+1)-и блокад 4 и т.д.
Блок 5 выделения двзпс старших разрядов на пять входов и четыре вы
хода (фиг. 3) содержит с первого по четвертый элементы И 15-И18. Нумерация входов блока 5 выделения двух старших разрядов на фиг. 1 и 3 дана в скобках.
Блок 5 вьщеления двух старших разрядов на 2п входов и 2п-1 выходов, примененный в системе, может быть выполнен аналогично приведенному на фиг. 3.
В качестве блока 9 управления может быть применен электропривод постоянного тока.
Система работает следующим образом.
Блок 1 задания программы, который может быть выполнен,например,на программных переключателях, вьщает в сумматор 2 код заданного положения объекта, сумматор 2 на своих выходах формирует двоичный код разности uS заданного и текущего положений объекта. С первого по 2п-й разряд двоичного кода разности uS поступают непосредственно в блок 4 выделения старшего разряда, а с (2п+1)-го по (2п+р)-й старшие разряды через элемент ИЛИ 3.
При этом разрядность сумматора 2, равная (2п+р), определяет максимальный путь перемещения L механизма (например, суппорта станка) или обрабатываемого изделия (например, стальной ленты в автоматической линии по поперечному раскрою рулонного материала),: а количество разрядов двоичного кода разности 4S, поступающих непосредственно в блок 4 выделения старшего разряда и равньк 2п, определяет максимально требуе0
5
5
мый путь торможения S - с номинальной скорости V. Например, при L 3276,7 мм, cf 0,1 мм и ,2 мм к входам первого элемента ИЛИ 3 должно быть подключено пять разрядов (соответствующих степенным числам 21° , 2 2 1% 2 и, 2 W) выхода сумматора 2, а общее количество выходов этого сумматора равно пятнад-. цати.
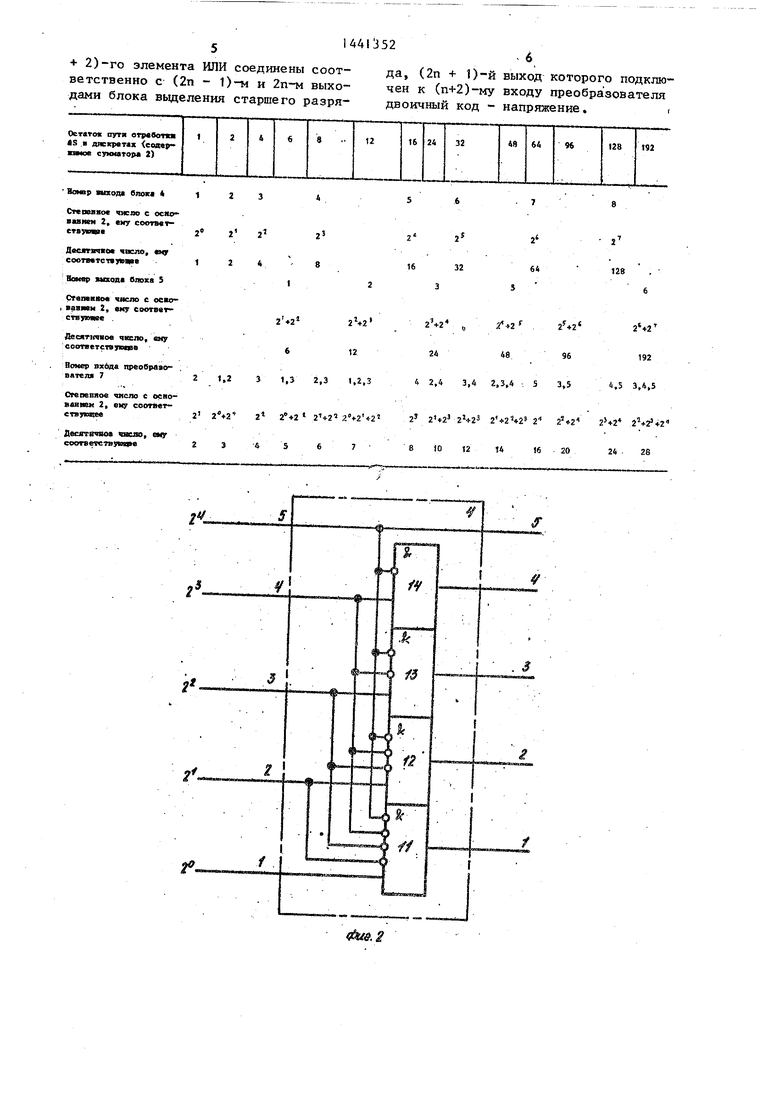
При помощи элементов ИЛИ 6.1-6(п+ +1), а также блока 4 вьщеления старшего разряда и блока 5 вьщеления двух старших разрядов на цифровые входы преобразователя 7 двоичный код - напряжение подается информация из сумматора 2 в соответствии с таблицей. Эта информация соответствует з множенному на 2 квадратному корню из весов отдельных нечетных разрядов двоичног кода разности заданного и текущего положений объекта, точность соответствия этой информации 6,07%.
Аналоговый сигнал с выхода преобразователя 7 двоичный код - напряжение через усилитель 8 поступает на блок 9 управления, перемещающий объект и датчик 10 обратной связи. Код текущего Положения объекта с выхода датчика 10 обратной связи поступает на первые (вычитающие) входы сумматора 2, который формирует новый код разности. Если этот код становится равным нулю, напряжение на вход усилителя 8 не подается и перемещение объекта заканчивается в данной точке.
Данная система увеличивает быстродействие за счет уменьшения времени торможения при позиционировании.
Для оптимального по быстродействию процесса позиционирования характерно торможение с постоянным максимально допустимым по величине ускорением. Связь скорости V и перемещения S при движении с ускорением а
определяется зависимостью V V2aS . Чтобы обеспечить такой закон движе ния, задание на скорость,, т.е. выходное напряжение преобразователя 7 воичный код - напряжение, должно
ыть связано с рассогласованием по перемещеншо параболической зависимостью. В системе обеспеч шается формирование параболически (с точностью +3,035%) изменяющейся по амплитуде гистограммы напряжений А, соответствующих весам последовательно выделяемых двух старших и старших разрядов кода разности заданного и текущего положений объекта (фиг.4), что приближает быстродействие процесса позхщионирования к оптимальному значению.
Данная цифровая система гфограм- много управления обеспечивает также более плавное торможение объекта в
связи с увеличением в два раза количества ступенек торможения.
Формула изобретения
Цифровая система для программного управления, содержащая последовательно
соединенные преобразователь двоичный код - напряжение, усилитель, блоки управления и датчик обратной связи, при этом выходы датчика обратной свя- зи подключены к первым входам сумматора на 2п+р разрядов, вторые входы которого подключены к выходам блока задания программы, с первого по 2п-й
Q выходы сумматора соединены соответственно с первого .по 2п-й входами блока выделения старшего разряда, а с (2п + 1)-го по (2п р)-й выходы сумматора соединены с входами перво5 го элемента ИЛИ, причем выход первого элемента ИЛИ подключен к (2ti+t)- му входу блока выделения старшего разряда, а выходы с второго по (п + +2)-й элементов ИЛИ соединены соотQ ветственно с первого по (п+1)-й входами преобразователя двоичный код - напряжение, отличающая ся тем, что, с целью повышения быстродействия и обеспечения более плавно5 го процесса торможения, введен блок
выделения двух старших разрядов, с . первого пи 2п-й входы которого соединены соответственно с второго по 2п -й выходами cy мaтopa и выходом
Q первого элемента ИЛИ, первый, второй и третей входы второго элемента ИЖ подключены соответственно к второму выходу блока выделения старшего раз р ряда и первому и второму выходам, блока выделения двух старших разря дов, первые входы третьего, четвертого - (п + 1)-го элемента ИЛИ соединены соответственно с первым, третьим - (2п - 3)-им выходами блока выделения старшего разряда, вторые входы третьего, четвертого - (п+1)- го элементов ИЛИ соединены соответственно с вторым, четвертым - (2п - - 2)-м выходами блока выделения старшего разряда, третьи входы третьего, четвертого - (п + 1)-го элементов ИЛИ соответственно с четвертым, шестым - 2п-м выходами блока выделения старшего разряда, четвертые входы третьего, четвертого - (п + 1)-го элемента ИЛИ соответственно с третьим, пятым - (2п - 1)-м выходами блока выделения двух старших разрядов, пятые входы третьего, четвертого - п-го элементов ИЛИ соединены соответственно с четвертым, шестым - (2п - 2)-м выходами блока выделения двух старших разрядов, первый и второй входы (п
5
0
5
0
5
1441352
J о
+ 2)-го элемента ИЛИ соединены соот- да, (2п + 1)-й выход которого подклю- ветственно с (2п - 1)-м и 2п-м выхо- чен к (п+2)-му входу преобра зователя дами блока вьщеления старшего разря- двоичный код - напряжение. 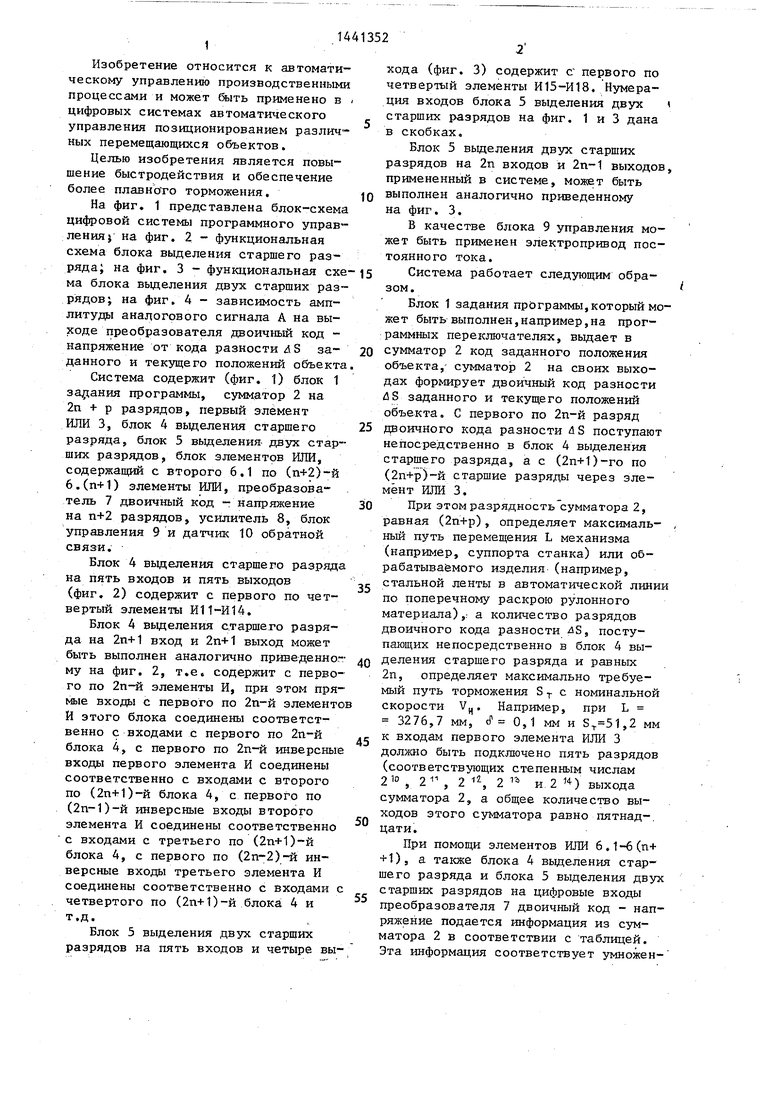

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система программного управления | 1987 |
|
SU1460713A1 |
| Цифровая система программного управления | 1987 |
|
SU1411710A1 |
| Цифровая система программного управления | 1988 |
|
SU1508192A1 |
| Цифровая система программного управления | 1980 |
|
SU888074A1 |
| Функциональный преобразователь нескольких переменных | 1986 |
|
SU1387022A1 |
| Преобразователь двоичного кода в двоично-десятичный | 1977 |
|
SU699520A1 |
| Устройство для программного управления | 1983 |
|
SU1087960A1 |
| Цифровая система программного управления с адаптивным позиционированием привода | 1980 |
|
SU943646A1 |
| Устройство управления позиционированием | 1987 |
|
SU1462248A1 |
| Устройство для вычисления остатка по модулю 2 @ +1 | 1990 |
|
SU1734212A1 |

Изобретение относится к автоматическому управлению производственными процессами и может быть использовано в цифровых системах автоматического управления позиционированием различных перемещающихся объектов. Целью изобретения является повышение быстродействия и об еспечение более плавного процесса торможения. Цифровая система программного управления содержит блок 1 задания программы, cyfwaTop 2 на 2п + р разрядов, первый элемент ИЛИ 3, блок 4 вьщеления старшего разряда, блок 5 вьщелення двух старших разрядов, блок элементов ИЛИ, содержащий с второго 6.1 по (п+2)-й 6.п+1 элементы ИЛИ, преобразователь 7 двоичный код 7 напряжение |на п -ь 2 разрядов, усилитель 8, блок управления 9 и датчик 10 обратной связи. Повышение быстродействия системы обеспечивается за счет формирования параболически (с точностью t +3,035) изменяющейся по амплитуде гистограммы напряжений на выходе преобразователя 7 двоичный код - напряжение, соответствующих весам последовательно выделяемых двух старших и старших разрядов кода разности uS заданного и текзгщего положений объекта. 4 ил., 1 табл. с (Л
Вомар шход блока
2 3
Z 8
2° 2 2
12 4
.
2 1,2 3 1,3 2,3 1,2,3
, ,
2 2 2°+2 « 2 +2 2° 2 +2 2
16
Лесятвож чаеяо, емг
соответствующе23 56
2
32
3
. 7
64
8
2 12в
: 242 2 2 +2
7
)0 12t416 20
24 28
| Цифровая система программного управления | 1976 |
|
SU624210A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровая система программного управления | 1980 |
|
SU888074A1 |
