Изобретение относится к технике автоматического управления производственными процессами и может быть применено в цифровых системах автоматического управления позиционированием различных перемещающихся объектов.
Цель изобретения - упрощение системы и повьш1ение надежности ее в работе..
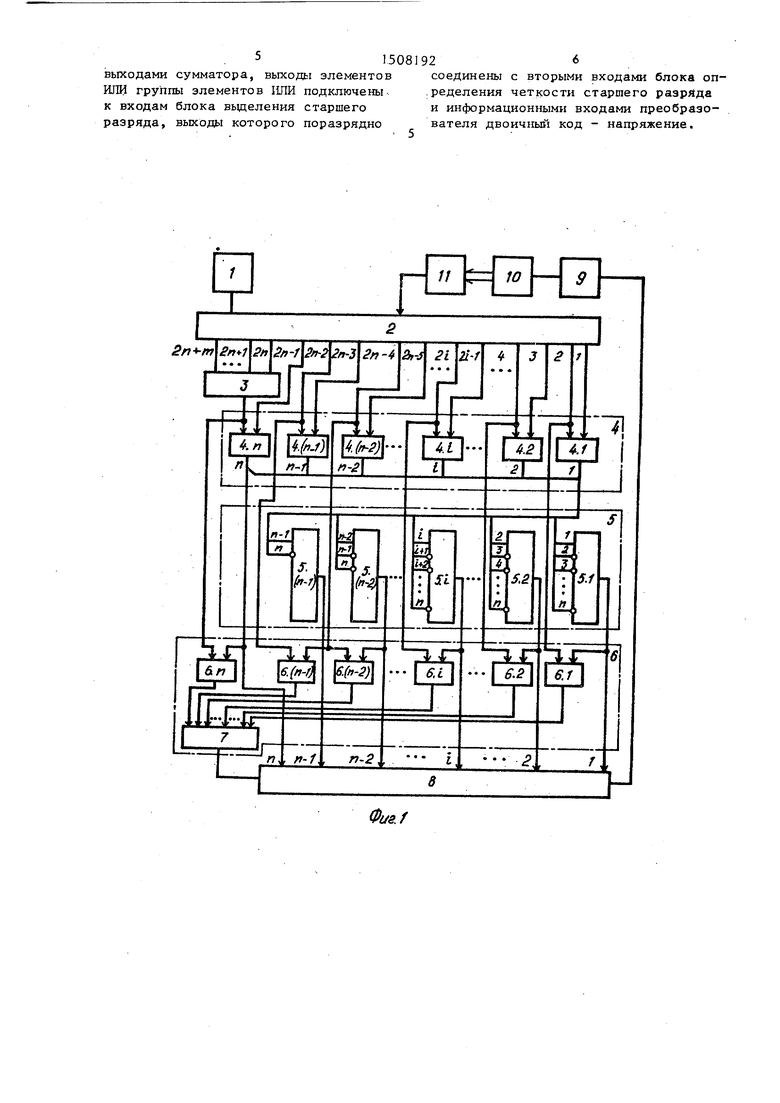
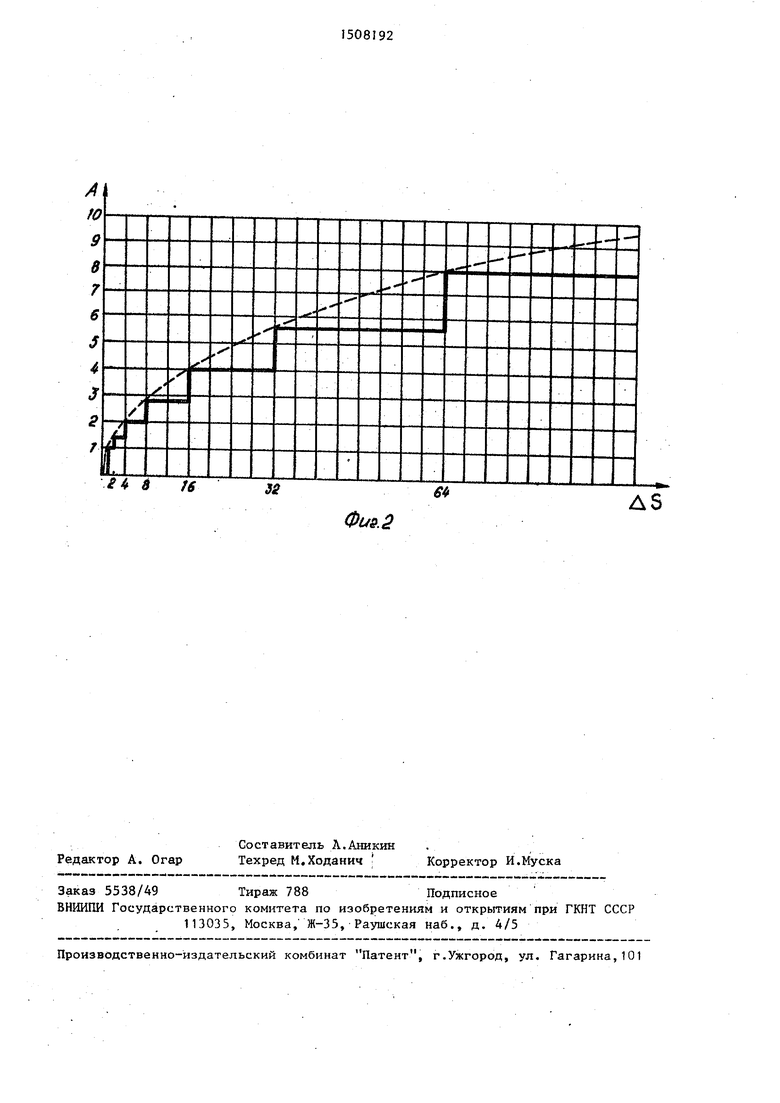
На фиг.I представлена блок-схема цифровой системы программного управления; на фиг.2 - зависимость амплитуды аналогового сигнала на выходе преобразователя двоичный код - напряжение от кода разности AS заданного и текущего положений объекта.
Система содержит блок 1 задания программы, сумматор 2 на 2n+ni разрядов, элемент 1ШИ 3, группу элементов ШШ 4, включающую элементы ИЛИ 4.1- 4.П, блок 5 вьзделения старшего разряда, выполненного, например, на элементах ИЛИ 5.1-5(п-1), блок 6 определения четкости cTapniero разряда, выполненного, например, на элементах И 6.1-6.П и элементе ИЛИ 7, преобразователь 8 двоичный код - напряжение на п разрядов, усилитель 9, блок 10 управления и датчик I1 обратной связи.
Система работает следующим образом.
3I508
Блок 1 задания программы, который может быть выполнен, например, на программных переключателях, выдает в сумматор 2 код заданного положения объекта. Сумматор 2 формирует двоичный код разности AS заданного и текущего положений объекта, и (2п-1) младших разрядов двоичного кода разности поступают непосредственно на входы группы элементов ИЛИ 4, а 2п-й (2п+т)-й старшие разряды - через элемент ИЛИ 3. Блок 5 выделения старшего разряда разрешает прохождение логической единицы, появившейся на выходе старшего элемента ИЛИ группы элементов ИЛИ 4, на соответствующий информационный вход преобразователя 8 дво- ичньй код - напряжение. Блок 6 опрё- деления четкости старшего разряда разности .i.S управляет коэффициентом преобразования преобразователя 8 . двоичный код - напряжение, вьщавая на его управляющий вход сигнал, вызывающий увеличение коэффициента преоб- разования преобразователя 8 в 42 раз при выявлении старшего разряда четного разряда кода разности US. Коэффициент преобразования преобразователя 8 уменьшается обратно до исходного значения, когда старший разряд кода разности AS нечетньй. Изменение коэффициента преобразования преобразователя 8 может, быть выполнено различными способами, например с помощью уп- равляемого электронного ключа, переключающего резисторы в цепи обратной связи суммирующего усилителя в преоб- разователе 8.
Аналоговый сигнал с выхода преобразователя 8 двоичный код - напряжение через усилитель 9 поступает на блок 10 управления, перемещающий объект, и датчик ,11 обратной связи. Код текущего положения объекта с выходов датчика 11 обратной связи, поступает .rfa первые (вычитающие) входы сумматора 2, который формирует новьй код разности. Если этот код становится равным нулю, напряжение на вход усилителя 9 rte подается и перемещение объекта заканчивается в данной точке Для оптимального по быстродействию процесса позиционирования характерно
торможение с постоянным максимально допустимым по величине ускорением. Связь скорости V и перемещения S при движении с ускорением а опре0 5 .
0
5
0
5
деляется зависимостью V -42aS , 1то- бы обеспечить такой закон движения, задание на скорость, т.е. выходное напряжение преобразователя 8 двоичный код - напряжение, должно быть связано с рассогласованием по перемещению параболической зависимостью, что и обеспечивается в предлагаемой системе.
Таким образом, введение новых связей обеспечивает упрощение системы управления за счет замены сложного (на 2п-1 разрядов) блока выделения старшего разряда более простым (на п разрядов) и, как следствие, повышение надежности работы системы при формировании параболической гистограммы входных сигналов преобразователя двоичный код - напряжение, соответствующих весам последовательно выделяемых старших разрядов кода разности ( заданного, и текущего положений объекта.
Ф о р м у л а из обретения
I
Цифровая система программного управления, содержащая группу элементов ИЛИ, блок выделения старшего разряда, элемент ИЛИ, блок определения четкости старшего разряда, последовательно соединенные преобразователь двоичный код - напряжение, усилитель, блок управления и датчик обратной связи, выходы которого подключены к первым входам сумматора, вторые входы которого соединены с выходами блока задания, а выходы, начиная с 2п- го, - с входами элемента ИЛИ, управляющий вход преобразователя двоичный код - напряжение подключен к выходу блока определения чёткости старшего разряда, пер:вые входы которого поразрядно соединены с первыми входами элементов ИЛИ группы элементов ИЛИ, отличающаяся тем, что, с целью ее упрощения и повьшгения надежности в работе, первые входы первого, ..., п-го элементов ИЛИ группы элементов ИЛИ соединены соответственно с вторым, четвертым, шестым, ..,, (2п-2)-м выходами сумматора и выходом элемента ИЛИ, вторые входы первого, ..., п-го элементов ИЛИ группы элементов ИЛИ соединены соответственно с первым, третьим, пятым,..., (2п-1)-м
515081926 .
выходами сумматора, выходы элементов соединены с вторыми входами блока оп- ИЛИ группы элементов ИЛИ подключены- .ределения четкости старшего разрйда к входам блока вьщеления старшего и информационными входами преобраэо- раэряда, выходы которого поразрядно вателя двоичный код - напряжение.

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система программного управления | 1987 |
|
SU1460713A1 |
| Цифровая система для программного управления | 1987 |
|
SU1441352A1 |
| Цифровая система программного управления | 1987 |
|
SU1411710A1 |
| Цифровая система программного управления | 1980 |
|
SU888074A1 |
| Устройство для программного управления | 1983 |
|
SU1087960A1 |
| Цифровая система программного управления | 1981 |
|
SU962856A2 |
| Устройство для адресного управления объектом | 1982 |
|
SU1109714A1 |
| Цифровая система программного управления с адаптивным позиционированием привода | 1980 |
|
SU943646A1 |
| Цифровая система программного управления | 1980 |
|
SU924673A1 |
| Цифроаналоговая система позиционирования | 1987 |
|
SU1500992A1 |
Изобретение относится к автоматическому управлению производственными процессами и может быть использовано в цифровых системах автоматического управления позиционированием различных перемещающихся объектов. Цель изобретения - упрощение и повышение надежности работы системы. Система содержит блок задания программы, сумматор на 2N+M разрядов, элемент ИЛИ, группу элементов ИЛИ, блок выделения старшего разряда, блок определения четности старшего разряда, выполненного например, на элементах И и элементе ИЛИ, преобразователь двоичный код-напряжение, усилитель, блок управления, датчик обратной связи. Введение новых связей в системе обеспечивает уменьшение аппаратурных затрат блока выделения старших разрядов за счет уменьшения его разрядности и, как следствие этого, повышение надежности работы системы. 2 ил.
Г
//
W
f4 a J6
ss
ff
AS
Фи&.2
| Установка для литья под низким давлением | 1977 |
|
SU624710A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровая система программного управления | 1980 |
|
SU888074A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
