00 ел
со
05
Изобретение относится к автоматическому управлению и может быть использовано в следящих системах электропривода.
Цель изобретения - повьппение быстродействия системы и точности отработки задающего сигнала.
На чертеже приведена функциональная схема следящей системы.
Система содержит измеритель 1 угла рассогласования, суммирующий усилитель 2, силовой преобразователь 3, исполнительный двигатель 4, редуктор 5, датчик 6 скорости, умножитель 7, первый - третий пороговые блоки 8 - 10, первый и второй инвертирующие усилители 11 и 12 и суммирующе-кор- ректирующий усилитель 13, на чертеже приняты следзпощие обозначения 6 рассогласование; 11, - напряжение обратной связи; К - коэффициент коррекции; Ug - сигнал датчика 6 скорости; со - частота вращения двигателя 4,
Следящая система работает следующим образомо
Измеритель 1 угла рассогласования выявляет разность между входным и выходным углами системы, преобразу ет ее в напряжение, которое усиливается суммирующим усилителем 2, Последний управляет силовым преобразова телем 3, выходное напряжение которого определяет частоту вращения двига теля 4. Скорость двигателя 4 измеряется датчиком 6 скорости, сигнал которого поступает на второй вход умножителя 7. Умножитель 7 формирует напряжение обратной связи UQC К х X иэе.
«Ьункция блоков 8-13 состоит в выработке напряжения для умножителя, соответствующего коэффициенту коррекции К. Сигнал на выходе первого порогового блока 8 равен нулю, когда величина рассогласования не превышает порогового значения , и равен разности модуля рассогласования и „ при/в/, , Величина E определяется уровнем шумов Аналогично выход второго порогового блока 9 равен нулю, когда величина рассогласования не превьппает предельного значения пр и равен разности модуля рассогласования Е„а при 1 Таким же образом выход третьего порогового блока 10 равен нулю, когда
10
15
20
25
30
35
40
45
50
55
частота вращения двигателя 4 не превышает порогового значения И ц и равен разности модуля сигнала Ug с датчика 6 скорости и величины сигнала Ug , соответствукяцего-со„о Пороговое значение С0„- такая частота вращения двигателя 4, при которой выходной угол следящей системы, войдя в зону, определяемую ± 5,, не вызовет перерегулирования, выходящего за пределы этой зоны.
При малых, меньших б„ , значениях сигнала рассогласования выходные сигналы первого и второго пороговых блоков 8 и 9 равны нулю и соответственно на первом и втором входах сумми- рующе-корректирукщего усилителя 13 сигналы отсутствуют. При этом благодаря сигналу смещения (не указан) на выходе корректирующего усилителя 13 имеется сигнал, соответствующий значению К 1 и напряжению обратной связи Ugg Ugg, Когда сигнал рассогласования увеличивается вследствие изменения задающего воздействия или нагрузки двигателя 4 и его модуль находится в пределах дрНа выходе первого 8 порогового устройства появляется сигнал /6/ п i который усиливается инвертирующим усилителем 11 и поступает на первый вход суммирующе-корректирунядего усилителя 13, уменьшая его выходной сигнал и тем самым соответствугацее значение коэффициента К, В результате нап-- ряжение уменьшается, выход суммирующего усилителя 2 возрастает и двигатель 4 отрабатьшает ошибку рассогласования с большой скоростью С уменьшением сигнала рассогласования форсирукяцее воздействие снида- ется и возрастает тормозящее действие от частоты вращения двигателя 4, если значение частоты вращения пре- вьш1ает сэ„ , При этом если частота вращения двигателя 4 значительно превысит со , то сигнал на выходе суммирзтоце-корректирующего усилителя 13 может превысить уровень, соответствующий единичному значению коэффициента К, т.е. возможно и U(jg дс усилит демпфирующее воздействие отрицательной обратной связи по частоте вращения двигателя 4, что приведет к эффективному и своевременному торможению.
При очень большом значении сигнала рассогласования, превышающем предельное значение В„р , на выходе второго порогового блока 9 появляется сигнал, который усиливается вторым 12 инвертирующим усилителем,имею- щим достаточно большой коэффициент усиления. Поэтому уже при малой величине сигнала на выходе второго порогового блока 9 выходной сигнал инвертирующего усилителя 12 принимает та- tO кое большое значение, что выходной сигнал суммирующе-корректирующего усилителя 13 становится отрицательным по знаку, что соответствует величине коэффициента При этом по- 15 лярность напряжения 1} становится противоположной сигналу U-Qf. с датчика 6 скорости, т.е. отрицательная обратная связь становится полржитель- нойо Значение коэффициента К в этой 20 ситуации таково, что система получает максимальное форсирующее воздействие, выходит на ограничения промежуточных координат, например, по мовход которого соединен с входом системы, второй вход - через редуктор с выходом двигателя и входом датчика скорости, а выход - с первым входом
суммирующего усилителя, второй .вход которого соединен с выходом умножителя, а выход суммирующего усилителя соединен через силовой преобразователь с входом двигателя, выход датчика скорости соединен с вторым входом умножителя, отличающаяся тем, что, с целью повышения быстродействия системы и точности отработки задающего воздействия,
, f
введены три пороговых блока, два инвертирующих усилителя и суь5мирующе- корректирующий усилитель, причем входы первого и второго пороговых блоков соединены с выходом измерителя рассогласования, .их выходы соответственно через первый и второй инвертирующие усилители соединены с
менту двигателя 4,.который разгоняет-25 первым и вторым входами суммирующе- tO 15 - 20
1413596
вход которого соединен с входом системы, второй вход - через редуктор с выходом двигателя и входом датчика скорости, а выход - с первым входом
суммирующего усилителя, второй .вход которого соединен с выходом умножителя, а выход суммирующего усилителя соединен через силовой преобразователь с входом двигателя, выход датчика скорости соединен с вторым входом умножителя, отличающаяся тем, что, с целью повышения быстродействия системы и точности отработки задающего воздействия,
введены три пороговых блока, два инвертирующих усилителя и суь5мирующе- корректирующий усилитель, причем входы первого и второго пороговых блоков соединены с выходом измерителя рассогласования, .их выходы соответственно через первый и второй инвертирующие усилители соединены с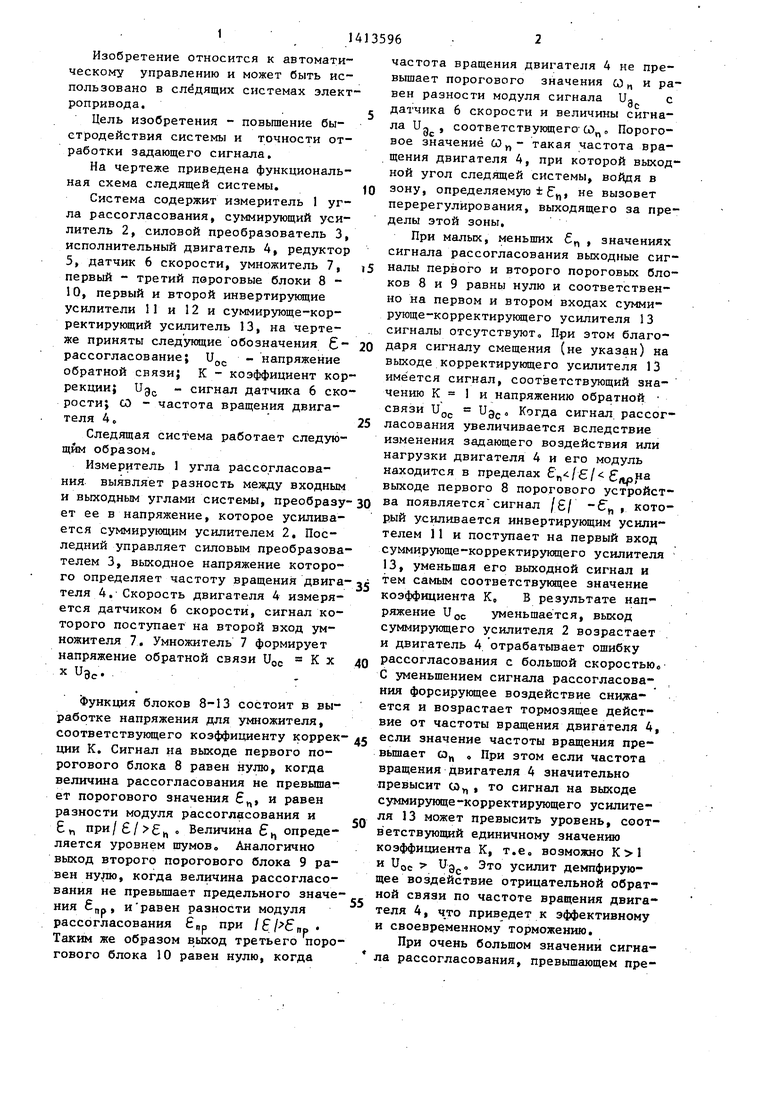
| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретный электропривод | 1978 |
|
SU911456A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Система управления электроприводом | 1988 |
|
SU1817058A1 |
| Следящая система | 1980 |
|
SU883861A1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| СЛЕДЯЩАЯ СИСТЕМА С КОМПЕНСАЦИЕЙ ИНЕРЦИОННОСТИ | 1991 |
|
RU2013796C1 |
| Измеритель углового рассогласования и его производной для следящих систем | 1975 |
|
SU600518A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД СО ВСТРОЕННОЙ ЦИФРОВОЙ КОРРЕКЦИЕЙ ОШИБКИ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2741075C1 |

Изобретение относится к технике абтоматического управления и может быть использовано в следящих системах электропривода. Целью изобретения является повышение быстродействия системы и точности отработки задающего воздействия. В систему введены пороговые блоки и усилители, которые о существляют коррекцию, заключающуюся в анализе ошибки рассогласования и частоты вращения двигателя, формировании максимального корректирующего воздействия при больших величинах ошибки рассогласования путем преобразования отрицательной обратной связи по частоте вращения в положительную и эффективном торможении двигателя при подходе к положению согласования путем усиления демпфирующего воздействия по частоте вращения двигателя. 1 ил. (Л
,ся с максимально возможным ускорением, С уменьшением сигнала рассогласования характер коррекции меняется, как описано вьше„.
Формула изобретения
Следящая система, содержащая измеритель угла рассогласования, первый
30
корректирующего усилителя, выход которого соединен с первым входом умножителя, а третий вход корректирующего усилителя соединен с выходом третьего порогового блока, соединенного своим входом с выходом датчика скорости.
| Следящая система | 1979 |
|
SU798693A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1978 |
|
SU842701A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
