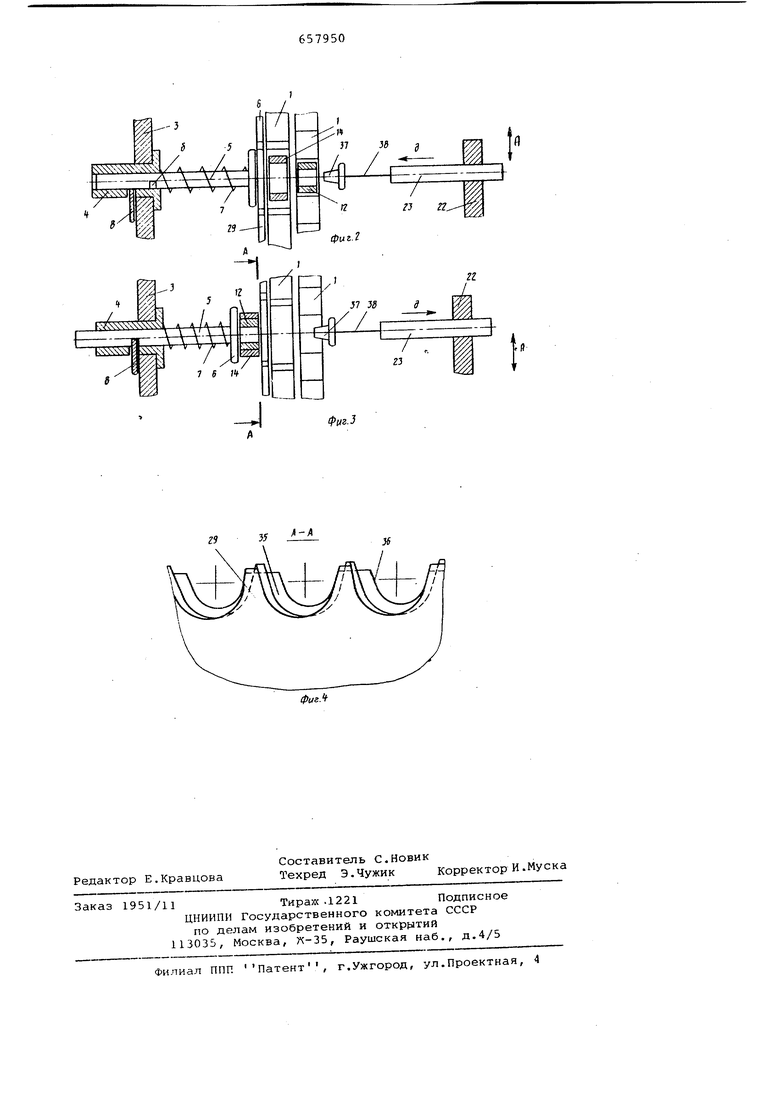
Изобретение относится к машинам для автоматической сборки деталей круглого.поперечного сечения, исполь зуемым в разных отраслях народного хозяйства. По основному авт.св. № 382496 известен автомат, который содержит ста нину, механизм управления и взаимодействующий с ним исполнитепьный механизм, включающий призму для базиро вания втулки, лотки, бункерные загрузочные устройства и вибратор. На станине размещены продольные направляющие, на которых установлен вибратор с рибрирующим стержнем, закрепленным на подвижном органе (или якоре) вибратора. Призма установлена с возможностью возвратно-поступатель ного движения перпендикулярно к направляющим, лоток для съема детзшей может совершать возвратно-качательны движения, а механизм управления выпо нен в виде цилиндра, шток которого жестко связан с траверсой, несущей толкатели, обеспечивающие нужное воз действие. Вибрирующий стержень может заканчиваться конусной частью. В известном автомате имеется толь ко одна рабочая позиция, поскольку это автомат циклического действия в котором траверса с управляющими элементами совершает возвратно-поступательные движения, производительность его все же ограничена. Целью изобретения является повьвиенке Производительности автомата, атакже его надежности, для чего устраняется возможность заклинивания собираемых деталей (втулок), которые при надевании на сопря -аемому деталь при колебаниях вибрирующего стержня перекашиваются. Для этого в предложенном автомате на стержнях посредством гибких эле eнтoв закреплены конусные головки, на станине размещены подпружиненные упоры и средства их фиксадии, а между ynopajvsH и призмами установлена с возможностью перемеп;;евЕЯ в плоскости перпендикулярной к оси сборки,плйстина-отрёикатель-, связанная с траверсой, на которой расположены питающие лоткк. На фиг.1 схематически изображен предложенный автомат, аксономатрия; на фиг.2 и 3 - автомат в двух фазах работы; на фиг.4 - сечение А-А на фи г. 3 ,/ Изобретение рассматривается на примере одновременной сборки пяти узлов, которые состоят из ролика и втулки, входяишх в конструкцию толкателя топливного насоса. Автомат содержит станину из парал лельных полос 1, к которым посредств шпилек 2 прикрегшена жестко штанга 3 В гнездах последней в направляющих втулках 4 подвижно установлены упоры 5 с тарелками б. Упоры ,5 отжимаются вправо пружинами 7, На штанге 3 уста новлены, качающиеся по стрелкам а язычки 8, которые оттягиваются пружи 9. Язычки 8 входят в поперечные прорези, выполненные в направляющих втулках 4, На стержневых частях упоров 5 пропезаны также поперечные про рези б , в i.:oiui.Uo мо.гут заходить язычки 8. Верхние части язычков 8 имеют скосыо Траверса 10 размещена над станино и связана со штоком рабочего цилиндра (не показан), перемещающим ее по стрелкам . На траверсе 10 укреп лены лотки для подачи собираемых деталей: лоток 11 для роликов 12 и лоток 13 для втулок -14„ На траверсе ,10 укреплен также кронштейн 15, на котором укреплена пластинчатая пруЯ5ина 16, взаимодействующая при движении траверсы 10 со скошенными верх нигли частяьШ язычков 8. Па траверсе 10 укреплен также зуб 17 посредством кронштейна 18. На ней же укреп лен кулачок 19 для подачи подвижного органа 20 вибратора 21, На подвижном органе 20 на бруске 22 укреплены поперечные стержни 23. Выбратор 21 колеблется в направлении стрелок вдапь направляю иих 24, а подвижный орган .20 ходит в направляющих 25 по стрелкам . Кулачок 26, также укрепленный на траверсе 10,- взаимодействует с рычагом 27, укрепленным на оси на полосе 1 станины. Рычаг 27 своим левым концом зацепляется за палец 28, закрепленный на отражательной пластине 29 и захватывает его. Через пазы 30 в отражательной пластине,. 29 проходят стерженьки 31, которые поддер живают Ш1.астину 29 и укреплены на полосе 1. Отражательная пластина 29 оттягивается назад пружиной 32. Таким образ-ом, отражательная пластина 29 установлена на станине Подвижно. Рычаг 27 прижимается к пальцу 28 пружиной 33. На отражательной пластине 29 закреплен упор 34. Зуб 17 укрепленный на траверсе 10, всегда находится слева от упора 34. Положе ние зуба 17 на фиг.1 показано условно справа от упора 34 для того, чтобы лотки 13 и 11 не закрывали другие части конструкции автомата, В полоса;с 1 станины выполнены призмы 35 И- 36 соответственно для втуло 14 и роликов 12. Стержни 23 несут к нические головки 37, которые присоединены к стержням 23 посредством 504 .гибких пружинных штырьков 38, На подвижном органе 20 укреплен ролик 39, взаимодействующий с кулачком 19. Подвижный орган 20 оттягивается назад пружиной 40. Работает автомат следующим образомВ исходном положении траверса 10 находится справа (фиг.1). В этом положении в лотки 11 и 13 из вибрОбункеров поступают собираемые детали ролики и втулки, в лотки 11 и 13 поступает по пять деталей. Затем рабочий цилиндр перемещает вперед траверсу 10. Когда траверса с лотками 11 и 13 проходит над призмами 36 и 3:3, ролнки 32 и втулки 14 пересыпаются из лотков 11 и 13 в гнезда этих призм 36 и 35. Когда траверса 10 . движется вперед, пластинчатая пружина 16 прощелкивает над pbi4araNM 8. Нружины 7 прижимают тарелки 6 толкателей 5 до упора в плоскость отражате.льной пластины 29, т.е. рычаги В не входят в поперечные прорези б, выполненные на стержневых частях толкателей 5 . Одновременно с траверсой 10 движется вперед и соединенный с ней кулачок 19. Кулачок 19 нажимает на роликовый выступ 39. Выступ 39 при этом смещается поперек движения траверсы, перемещая подвижный орган 20, несущий вибрирующие стержни 23. Стержни 23 через штырьки 38 подают вперед конусные головки 37, которые входят в отверстия роликов 12, надевающиеся на конусные головки 37. Последние вибрируют (как и стержни 23) поперек своих осей и .захватывают ролики 12, которые интенсивно вра щаются на головках 37, обкатывая последние с частотой, .равной частоте вибраций подвижного органа 20, т.е. с частотой колебаний вибратора 21. Обкатывающиеся ролики 12 надви аются головкаг-да 37 на втулки 14 и вследствие такого вращения и .подачи быстро находят отверстия втулок 14 и входят в них о Этот процесс аналогичен процессу соединения валика со втулкой по основному авт.св.Ролики 12 вместе с головками 37 движутся .вперед и сходят с призм 36, соединяясь со втулками 14. Затем буртики головок 37 смещают собранные узлы (ролики и втулки) с призм 35. Смещаясь, собранные узлы действуют на тарелки 6 упоров 5. Поэтому пружины 7 сжимаются, а упоры 5 отходят назад (на фиг.1 по стрелке е). Когда упоры 5 отходят в крайнее заднее положедие, язычки 8 заскакивают в проупоров 5, и фиксируют их в этом полох ении (см. фиг. 3), В конце хода траверсы 10 (стрелка -) кулачок 26 набегает на рычаг 27 и поворачивает его по часовой стрелке, растягивая пружину 33. Тем сагуым освобождается палец 28, укрепленный на пластине-отражателе 29. Пластина-отра жатель 29 тоже освобождается и пружина 32 отводит эту пластину влево, последняя движется вдоль пазов 30, опираясь на пальцы 31, Переместившаяся влево пластина 29 своими зубцами отсекает собранные узлы, не позволяя им опять отойти в гнезда призмы 35 при. отходе головок 37. Поэтому когда головки 37 уходят назад в исходное положение (по стрелке Э , фиг.З), они не тянут за собой собранные узлы Собранные узлы подаются головками 37 вперед на такое расстояние, чтобы втулки 14, а значит и собранные узлы, полностью выходили из призмы 35 (фиг.З). Поэтому у собранных узлов нет опоры и держатся они исключительно на головках 37. Когда головки уходят назад, собранные узлы ничем уже не удерживаются и падают на отводящий лоток. Головки 37 вместе со .стержнями 23 уходят назад тогда, когда траверса начинает обратный ход - на исходную позицию (стрел1;а Б) . Кулачок 19 отходит вместе с ней, а пружина 40 отводит подвижный орган 20 в начальное положение (стрелка 9). Одновременно отходит назад кронштейн 15, и пружина 16 поворачивает рычаги 8 в направлении стрелки Q, , отводя их от упоров 5. Поэтому 8 последовательно выходят из прорезей б в упорах 5, и последние под действие пружин 7 опять подходят к торцу плас тины-отсекателя 29, т.е. становятся в положение, требуемое для проведени следующего цикла сборки (см. фиг.2). В конце хода назад траверсы 10 зуб 17 нажимает на упор 34 и оттягивает этот упор вправо, а значит оттягивает и скрепленную с упором 34 пластину-отрах атель 29 назад - в исходное положение. Зуб рычага 27 под действием пружины 33 поворачивается против часовой стрелки и захватывает палец 28, чем фиксируется исходное положение пластины 29 (в этом положении пластина 29 не мешает собранному узлу смещаться из гнезда призмы 35 влево (фиг. 2). Когда траверса 10 отходит назад в исходное положение (как показно на фиг.1) лотки 11 и 13 располагаются под питаю И ими лотками вибробункеров, из которых в лотки 11 и 13 поступают новые порции собираемых деталей. Затем траверса 10 опять идет вперед и собирается новая группа узлов и т .д. Формула изобретения 1. iвтoмaт для сборки деталей типа валик-втулка по авт.св.№ 382496, о тличающийся тем, что, с целью повышения его надежности и производительности, на стержнях посредством гибких элементов закреплены конусные головки, на станине размещены подпружиненные упоры и средства их фиксации, а между упорами и призмами установлена с возможностью перемещения в плоскости перпендикулярной к оси сборки пластина-отражатель. 2. Автомат поп.1, отличаюЩ и с я тем, что пластина-отражатель связана с траверсой, на которой расположены питающие лотки.
,
-О
.З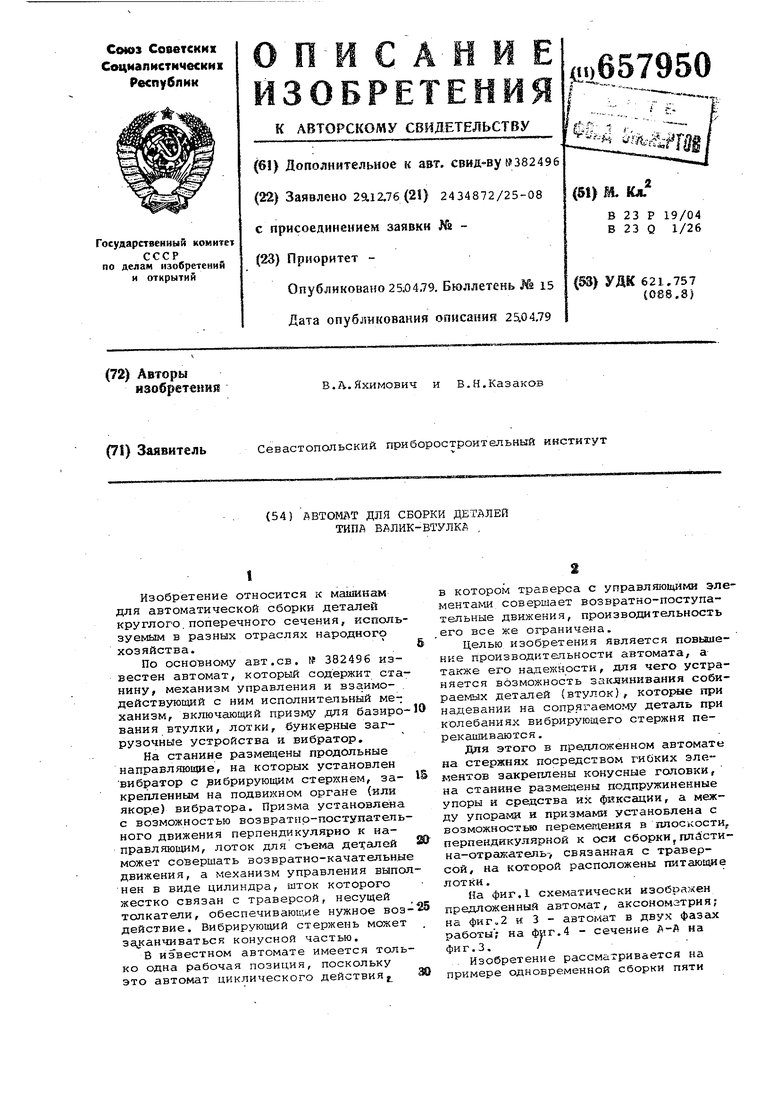
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ СБОРКИ ДЕТАЛЕЙ ТИПА ВАЛИК-ВТУЛКА | 1973 |
|
SU382496A1 |
| Сборочный агрегат | 1979 |
|
SU872177A1 |
| Шагозадающее устройство к пружинонавивочному автомату | 1985 |
|
SU1301538A1 |
| Устройство для подачи заготовок в зону обработки | 1981 |
|
SU1091968A1 |
| Устройство для сборки узлов типа "вал-втулка | 1978 |
|
SU766814A1 |
| Автомат для сборки пряжек | 1973 |
|
SU484967A1 |
| Резьбонакатной полуавтомат | 1988 |
|
SU1625568A1 |
| Устройство для сборки роликов | 1981 |
|
SU1054007A1 |
| Автомат для полугорячей штамповки обкаткой | 1986 |
|
SU1398957A1 |
| Установка для изготовления изделий из ленты | 1981 |
|
SU1178556A1 |
Л-А
