11
(Л
4
а ьо
1чЭ
Изобретение относится к подъемно-транспортному машиностроению, а именно к манипуляторам.
Цель изобретения - расширение зоны перемещения.
На чертеже изображена кинематическая с.1сема манипулятора.
Манипулятор содержит стрелу, включающую в себя по крайней мере два шарнирных четырехзвенника, смежные стороны которых образованы крестообразно располо- Неиными рычагами 1 и 2, соединенными друг с другом в средней части посредст- во.м шарнира 3. Соосно с шарниром 3 на стреле смонтирован ролик 4, расположенный на направляющей 5, установленной горизон- трльно на основании 6. Четырехзвенник включает рычаги 7-10, шарнирно соеди- с концами смежных рычагов. Противоположные стороны четырехзвенников по- равны. На основании 6 смонтирован п:ривод возвратно-поступательного переме- п|1ения, например цилиндр 11, тяга 12 ко- тЬрого несет ро;1ик 13, расположенный в вертикальной направляющей 14 и связанней с шарниром 15 рычагов 9 и 10. Грузозахватный орган 16 подвешен к концам рычагов 7 и 8.
Ма И11улятор работает следующим обра30 М.
Вертикальное перемещение груза осуществляется усилием тяги 12 цилиндра 11. Г оризонтальное перемещение поднятого на требуемую высоту груза осуществляется усилием оператора, приложенным к точке подвеса 1 руза. Уравновещивание грузовой стрелы без груза осуществляется без до- 1|о:111ите,лы1ых средств, подбором массы эле- NleHTOB грузовой стрелы. Для уравновешивания груза необходимо создать определенное давление в цилиндре 11, зависящее от веса манипулируемого груза.
Такое конструктивное выполнение устройства нозво.чяет полностью уравновесить звенья грузовой стрелы, обеснечив при этом постоянство приведенной на IHTOK силового
цилиндра 11 силы, следовательно, и давление рабочей среды в цилиндре 11, и сохранить эти свойства нри любом положении манипулируемого груза в зоне обслуживания.
Вес рычагов 1, 2 и 7-10, образующих параллелограммы, установ.тен согласно зависимостям
GI- It-G2l2-Оз-
Об- 1б+Со- Ь-Оц-
К- (G3+G6)G4-fGi,
где G/, 1; - вес и расстояние от центра тяжести i-ro рычага до его точки на общей диагонали параллелограммов (положительное при расположении центра тяжести выше диагонали и отрицательное при расположении центра тяжести ниже диагонали); К - коэффициент подобия параллелограммов.
Формула изобретения
.Манипулятор, содержащий стрелу, включающую в себя по крайней мере два щарнирных четырехзвенника, смежные стороны которых образованы крестообразно расположенными рычагами, шарнирно соединенными друг с другом в их средней части и связанными с основанием, грузозахватный орган, закрепленный на конце одного четырехзвенника стрелы, привод возвратно-поступательного перемещения, уста- }ювленный на основании и включающий в себя тягу с роликом, и направляющую для ролика, установленную на основании, отличающийся тем, что, с целью расширения зоны перемещения, он снабжен дополнительным роликом, установленным на стреле СООСНО с шарниром соединения рычагов, и дополнительной направляющей, установленной горизонтально на основании и несущей второй ролик, причем противоположные стороны четырехзвенников попарно равны, первый ролик смонтирован на конце другого четырехзвенника стрелы противоположно грузозахватному органу, а его направляющая расположена вертикально.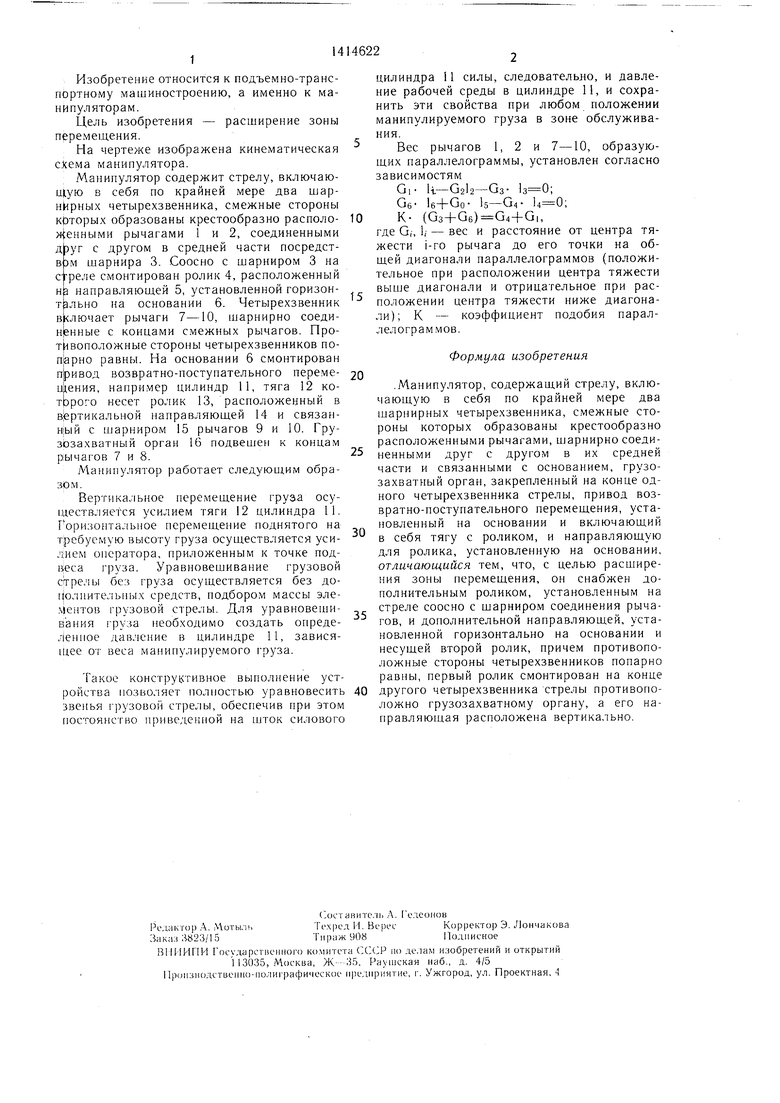
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-манипулятор | 1989 |
|
SU1634624A1 |
| Уравновешивающий подъемник | 1981 |
|
SU988751A1 |
| Манипулятор | 1984 |
|
SU1255553A1 |
| Устройство для гашения колебаний грузовой подвески крана | 1975 |
|
SU587085A1 |
| ПОГРУЗЧИК "ПРЯМАЯ ЛОПАТА" | 1993 |
|
RU2081052C1 |
| Уравновешивающий подъемник | 1985 |
|
SU1271818A1 |
| Грузоподъемный кран | 1979 |
|
SU885143A1 |
| Уравновешивающий подъемник | 1982 |
|
SU1039861A1 |
| Манипулятор | 1987 |
|
SU1442500A1 |
| Манипулятор | 1986 |
|
SU1542791A2 |
Изобретение относится к области подъемно-транспортного оборудования, а именно к манипуляторам. Цель изобретения - расширение зоны перемещения. Манипулятор содержит цилиндр II, связанный с одним шарнирным четырехзвен- ником, включающим рычаги I, 2, 9, 10. Грузозахватный орган 16 подвешен к другому четырехзвеннику, включающему рычаги I, 2, 7, 8. Для перемещения грузозахватного органа I6 в вертикальном направлении используется цилиндр П. I ил.
| Шарнирно-сочлененное стреловое устройство (его варианты) | 1982 |
|
SU1129177A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
