€
(Л
С55 СО
to
Изобретение относится к машиностроению и может быть использовано в конструкциях роботов машипуляторов.
Цель изобретения - повышение надежности работы.
На чертеже представлена захватная головка, общий вид.
Захватная головка содержит привод рабочего инструмента, выполненный в виде эластичной рубашки 1, жестко закрепленной на рабочем инструменте 2, установленном : на корпусе 3 выходного звена робота с помощью фиксатора 4 относительного положения рабочего инструмента 2. Фиксатор 4 может быть выполнен, например, в виде электромагнита.
Захватная головка работает следующим образом.
Робот перемещает захватную головку по заданной программе в точку обработки на поверхности изделия. Положение рабочего инструмента 2 относительно корпуса 3 выходного звена при перемещении его из исходного положения в первую точку обработки фиксируется фиксатором 4.
После легкого прижатия кромки эластичной рубашки 1 к поверхности изделия с усилием, достаточным для обеспечения прилегания кромки по всей длине ее окружности, фиксатор 4 по внelJJнeй команде освобождает рабочий инструмент 2, а в полости эластичной рубаижи 1 с помощью пневмо- системы создается разрежение. Скорость достижения и величина разрежения могут регулироваться пневмосистемой в зависимости от характера выполняемой технологической операции. За счет разрежения воздуха в полости эластичной рубашки 1 оболочка последней прогибается и перемещается вместе с рабочим инструментом 2, который осуществляет заданное величиной разрежения силовое воздействие на 5 поверхность изделия {положение рабочего инструмента 2 и эластичной рубащки 1 показано пунктиром). Затем с помощью той же пневмосистемы разрежение в полости эластичной рубащки 1 снимается, за
Q счет собственной упругости она занимает вместе с рабочим инструментом 2 первоначальное положение.
По внешней команде фиксатор 4 снова фиксирует рабочий инструмент 2 в исходном положении. Робот по програ.мме пере5 носит захватную головку в новую точку обработки, которая осуществляется в той же последовательности. При выполнении описанной операции с односторонним силовым воздействием реакция этого воздействия гасится усилие.м, создаваемым за счет разреже0
ния воздуха в полости эластичной рубашки 1, Формула изобретения
Захватная головка, содержащая корпус, на котором установлены рабочий инструмент с приводом его перемещения, отличающаяся тем, что, с целью повыщения надежности работы, на корпусе установлен фиксатор относительного положения рабочего инструмента, а привод перемещения рабочего ин- струмента выполнен в виде эластичной рубашки, жестко закрепленной на рабочем инструменте, внутренняя полость которой соединена с пневмосистемой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка | 1986 |
|
SU1414633A1 |
| Захватная головка | 1986 |
|
SU1390018A1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| Промышленный робот | 1983 |
|
SU1142270A1 |
| Захватный корректирующий модуль | 2015 |
|
RU2618019C1 |
| Захватный орган | 1986 |
|
SU1433795A1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ КОРРЕКТИРУЮЩИЙ МОДУЛЬ | 2009 |
|
RU2431561C2 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| Устройство для сварки кольцевых швов | 1987 |
|
SU1433705A1 |
| Вакуумный захватный агрегатный модуль | 2018 |
|
RU2691155C1 |
Изобретение относится к области машиностроения и может быть использовано Б конструкциях роботов манипуляторов. Цель изобретения - повышение надежности работы. Для этого на корпусе 3 выходного звена робота установлен фиксатор 4 относительного положения рабочего инструмента 2. Привод перемещения рабочего инструмента 2 выполнен в виде эластичной рубашки 1, полость которой соединена с пнев.мосистемой. За счет разрежения воздуха в полости эластичной рубашки 1, оболочка последней прогибается и перемещается вместе с рабочим инструментом 2, который воздействует на поверхность изделия. На период выполнения технологической операции рабочий инструмент 2 освобожден от связи с корпусом 3 выходного звена робота. Реакция одностороннего силового воздействия рабочего инструмента 2 на поверхность изделия компенсируется усилием, создаваемым захватным органом. 1 ил.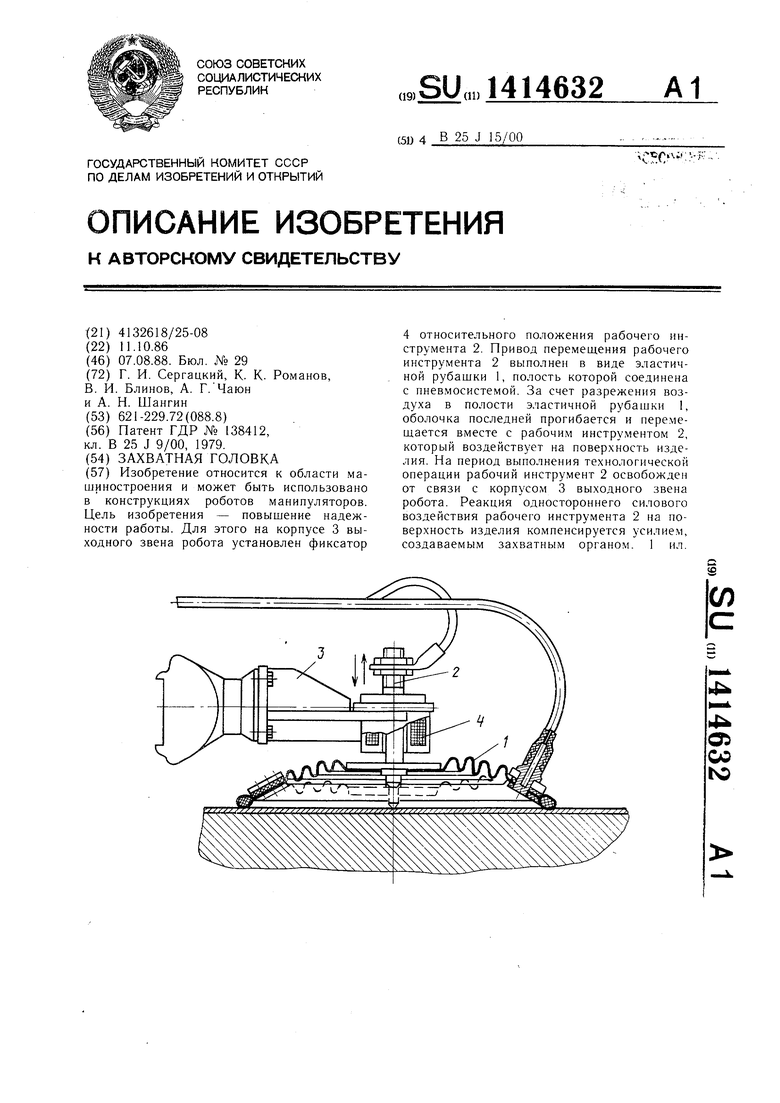
| 0 |
|
SU138412A1 | |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
