Изобретение относится к машиностроению и может быть использовано в конструкциях роботов манипуляторов.
Цель изобретения - повышение надежности работы.
На чертеже представлена захватная го- Довка, общий вид.
Захватная головка содержит пневмопривод, выполненный в виде цилиндра 1, Знутри которого расположен поршень 2, связанный с рабочим инструментом 3, со стороны которого на цилиндре 1 закреплен захЕ атный орган 4. Донная часть 5 з;ахватного органа 4 охватывает рабочий ин- с:труме 1т 3 и имеет на участке, ограни- фнном цилиндре 1, перфорацию, например фверстия, связывающие полость разреже- Цкя цилиндра 1 с полостью разрежения захватного органа 4. Цилиндр 1 установлен йа корпусе 6 звена робота с возмож- ь остью возвратно-поступательного переме- и снабжен фиксатором 7 относи- T vibHoro положения, выполненным в виде .фектромагнита. Пружина 8 удерживает пор- iijjenb 2 с рабочим инструментом 3 в ней- Т|ральном положении относительно донной части 5 захватного органа 4. Последний в заимодействует с поверхностью детали 9. : Захватная головка работает следующим образом.
После выполнения технологической опера- :,. (р {.;,метки, клепки и т. п.) корпус 6 выходною звена робота перемещается п :;а;;.::;,11ог- программой положение таким обра:5о, чтобы обеспечивалось прилегание ivpoviOK з;1хватног() органа 4 к поверх- liiJCTM миле.пия 9. При этом цилиндр н-ахо.мится относительно корпуса 6 выход- iiOi o ; , в зафиксированном фиксатором 7 1:ейт)а, положении. Рабочий инстру- мсчп 3 с поршнем 2 находятся в исходном ио- ..оженнн, определяемом свободным состоянием Г; р ужины 8.
Для оказания силового воздействия на поверхность изделия 9 цилиндр 1 по внешней команде расфиксируют фиксатором 7, а в обгцей камере цилиндра I и захват- HOi O органа 4 с помощью пневмосистемы (не показана) создают разрежение, под действием которого поршень 2 вместе с рабочим инст рументом 3 перемещается в направлении поверхности изделий 9, сжи- .ая пружину 8. Поскольку кромки захват- :1ого opiana 4 обычно выполняются из мяг
O 5
5
0
0
5
0 5
кого деформируемого материала, то под действием разрежения цилиндр 1 несколько сместится относительно корпуса выходного звена робота в направлении поверхности изделия 9. Однако это смещение не окажет воздействия на корпус 6 выходного звена робота, так как цилиндр 1 освобожден на период выполнения технологической операции от связи с корпусом 6 выходного звена робота.
Усилие воздействия рабочего инструмента 3 может быть увеличено подачей избыточного давления в противоположную относительно него камеру цилиндра 1. Реакция одностороннего силового воздействия рабочего инструмента 3 на поверхность изделия 9 будет скомпенсирована усилием, создаваемым захватным органом 4, и не будет воздействовать на корпус б выходного звена робота, чем и достигается поставленная цель. Силовое воздействие прекращают путе.м снятия с помощью той же пнев- мосистемы разрежения в общей с цилиндром 1 и захватным органом 4 ка.мере.
Возврат рабочего инструмента 3 в .исходное положение осуществляется с по- .мощью пружины 8. Цилиндр 1 после снятия разрежения возвращается в начальное положение под действием упругих сил кромки захватного органа 4. По внешней команде фиксатор 7 вновь фиксирует начальное положение цилиндра I относительно корпуса 6 выходного звена. После этого захватная головка переносится робото.м в очередную точку обработки изделия и выполнение технологической операции повторяется в той же последовательности.
Формула изобретения
Захватная головка, содержащая корпус, рабочий инструмент с приводом его перемещения и захватный орган, отличающаяся тем, что, с целью повышения надежности работы, на корпусе установлен фиксатор относительного положения привода рабочего инструмента, при этом привод вь:- нолнен в виде цилиндра с поршнем, а рабочий инструмент установлен на поршне, захватный орган выполнен в виде вакуумной присоски, установленной на цилиндре со стороны рабочего инструмента соосно с ним, причем бесштоковая полость цилиндра и полость вакуумной присоски соответственно соединены с пневмосистемой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка | 1986 |
|
SU1390018A1 |
| Захватная головка | 1986 |
|
SU1414632A1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| Вакуумный захватный орган | 1981 |
|
SU1005996A1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ КОРРЕКТИРУЮЩИЙ МОДУЛЬ | 2009 |
|
RU2431561C2 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2008 |
|
RU2370359C1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2318653C2 |
| Захватный корректирующий модуль | 2015 |
|
RU2618019C1 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| Инструментальный магазин | 1989 |
|
SU1722777A1 |
Изобретение относится к области машиностроения и может быть использовано в конструкциях роботов манипуляторов. Цель изобретения - повышение надежности работы. На корпусе 6 выходного звена робота установлен фиксатор 7 относительного положения рабочего инстру Х Чх ХчХХЧХЧ Ч ч ч -у чХУ .мента 3. При этом привод перемещения рабочего инструмента 3 выполнен в виде цилиндра 1, внутри которого расположен поршень 2, связанный с рабочим инструментом 3. На цилиндре 1 закреплен захватный орган 4, полость которого соединена с пневмосистемой. При создании разрежения в полости захватного органа 4 рабочий инструмент 3 воздействует на поверхность изделия 9. На период выполнения технологической операции цилиндр 1 освобожден от связи с корпусом 6 выходного звена робота. Реакция одностороннего силового воздействия рабочего инструмента 3 на поверхность изделия 9 компенсируется усилием, создаваемым захватным ор- гано.м. 1 ил. а g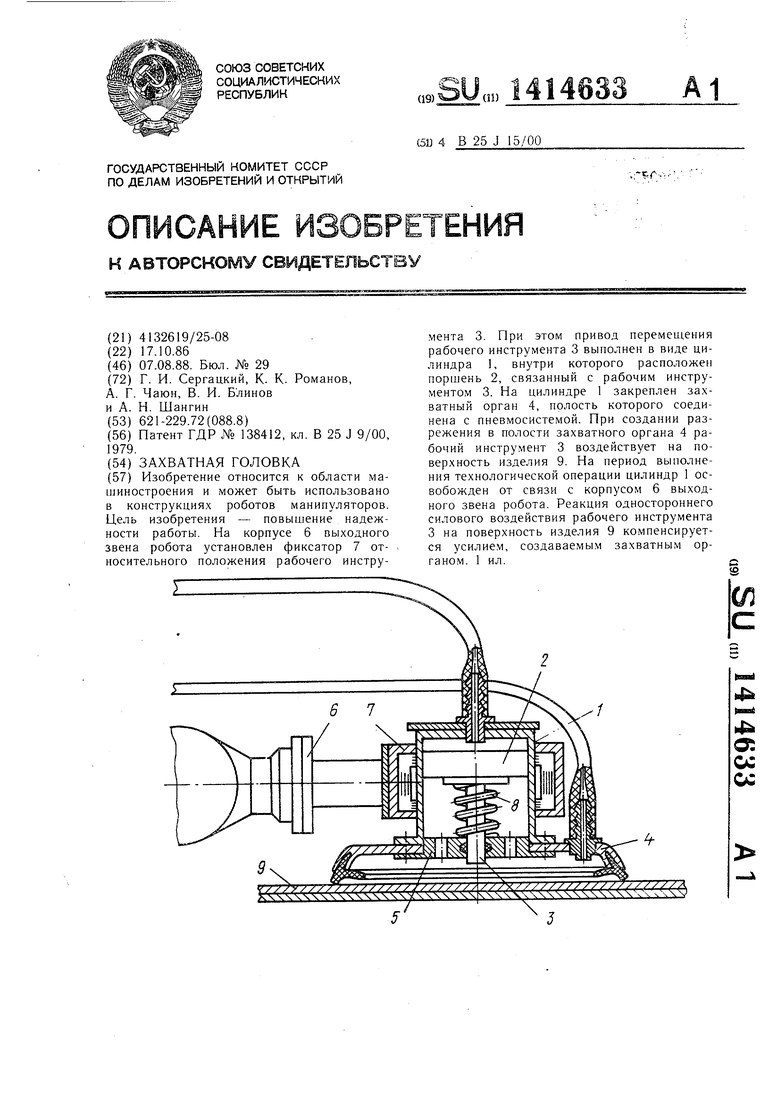
| 0 |
|
SU138412A1 | |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
