CfJUS.Z
Изобретение относится к подъемно- транспортному машиностроению и может i быть использовано для межоператрюн- ;кого транспортирования.
Целью изобретения является уменьшение габарита конвейера по высоте.
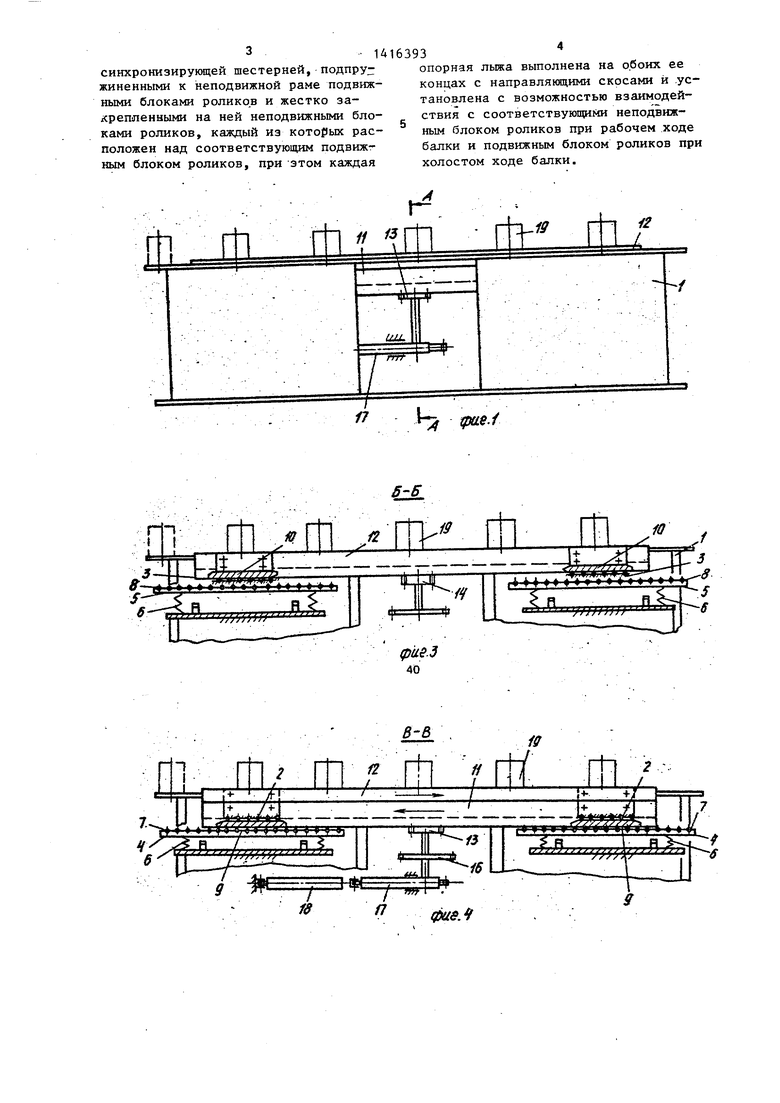
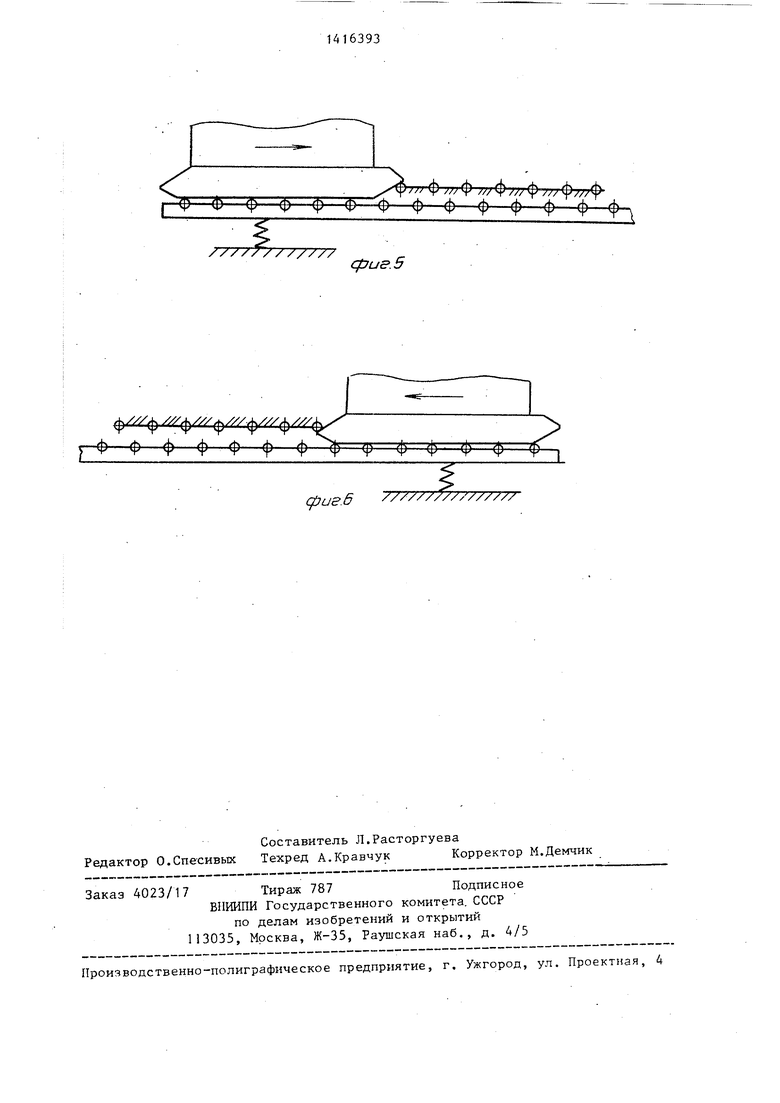
На фиг. 1 изображен фронтальный вид конвейера; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б на фиг.2; на фиг.4 - разрез В-В на фиг.2; на фиг. 5 и 6 - схемы входа лыжи на и под неподвижным блоком 1 роликов.
Шаговь1й конвейер содержит непо- движную раму 1, жестко закрепленные на ней неподвижные блоки 2 и 3 роликов, установленные на неподвижной раме 1 на упругих основаниях 4 и 5, подпружиненных к ней пружинами 6, подвижные блоки 7 и 8 роликов.
Между блоками 2 и 7, 3 и 8 роликов установлены опорные лыжи 9 и 10, закрепленные по две на одной боковой стороне несущих балок 11 и 12, кото- рые установлены с возможностью перемещения в противофазе и являются элементами подвижной рамы. Балки 11 и 12 вьшолнены с расположенными вдоль них с другой боковой стороны зубчатыми рейками, которые находятся в зацеплении с синхронизирующими шестернями 13 и 14, которые установлень5 на неподвижной раме 1 и кинематически через промежуточные шестерни, одной из которых является шестерня 15, связаны с блок-шестерней 16, которая входит в зацепление с рейкой 17, соединенной с приводом 18 шагового перемещения подвижной рамы, установленньм на неподвижной раме 1. Каждый из неподвижных блоков 2 и 3 роликов расположен над соответствующим подвижным блоком 7 или 8 роликов, при этом каждая опорная лыжа 9 или 10 вьшолнена на обоих ее концах с направляющими скосами и установлена с возможностью взаимодействия с соответствующими неподвижным блоком 2 или 3 роликов при рабочем ходе балки и подвижньм блоком 7 или 8 роликов при холостом ходе балки.
Конвейер работает следующим образом.
Лыжи 9 несущих балок 11 устанавливаются, как показано на фиг. 6, а лыжи 10 несущих балок 12 устанавливаются, как показано на фиг. 5.
д
15 20
25 JQ д,. .
35
50
5
Включается привод 18 и, выдвигаясь, рейка 17 через блок-шестерню 16 и промежуточную шестерню приводит во вращение шестерни 13, а через паразитную шестерню - 15 и промежуточную шестерню 14, Вращаясь, шестерни 13 и 14 приводят в движение балки 11 и 12 навстречу одна другой. Лыжи 9 балок 11, находя скосом на ролики неподвижных блоков 2, отжимают подпружиненные пружинами 6 блоки 7 роликов и перемещают балку 11 под груза- йи 19, а лыжи 10 балок 12, находя обратным скосом на ролики неподвижных блоков 3, поднимают балки 12, а вместе с ними и 19 с неподвижной рамы 1 и переносят их на шаг, определяемый расстоянием между точками контакта входа и выхода из зацепления балок с грузами. При сходе льгас 10 с роликовых блоков 3 грузы 19 опускаются с балок 12 на неподвижную раму 1 .
При возврате рейки 17 привода 18 в исходное положение происходит обратное: лыжи 10 балок 12 отжимают подпружиненные роликовые блоки 8 и проходят свободно под грузами, а лыжи 9, находя скосами на неподвижные роликовые блоки 3, поднимают балки 11, которые переносят грузы 19 на шаг.
Следовательно, каждое движение рейки 17 - прямое и обратное - является рабочим, что в 2 раза увеличивает производительность конвейера и сводит к минимуму непроизводительные затраты энергии, затрачиваемые в известных конструкциях на холостой ход.
Формула изобретения.
Шаговый конвейер, содержащий неподвижную раму, подвижную раму в виде балок, установленных с возможностью перемещения в противофазе, и привод перемещения подвижной рамы, отличающийся тем, что, с целью уменьшения габарита, конвейера по высоте, каждая балка выполнена с расположенным вдоль нее с одной боковой стороны зубчатой рейкой и с другой боковой стороны - двумя опорными лыжами, причем конвейер снабжен кинематически связанной с приводом перемещения подвижной рамы, установленной на неподвижной раме и находящейся в зацеплении с- зубчатыг-ш рейками балок.
3 1416393
синхронизирующей шестерней, подпру- опорная лыжа выполнена на обоих ее жиненными к неподвижной раме подвиж- концах с направляющими скосами и .ус- ными блоками роликов и жестко за- тановлена с возможностью взаимодей- крепленыыми на ней неподвижными бло- ствия с соответствующими неподвижками роликов, каждый из которых рас- ным блоком роликов при рабочем ходе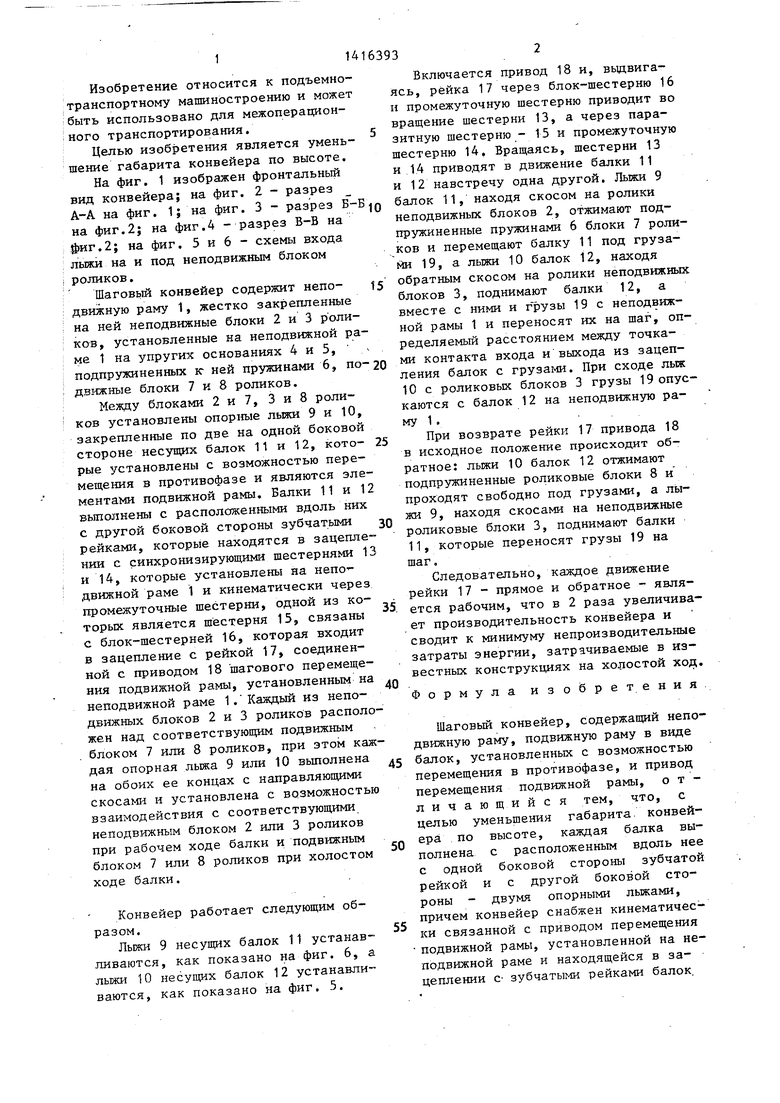
| название | год | авторы | номер документа |
|---|---|---|---|
| Перекладчик штучных грузов сшАгОВОгО КОНВЕйЕРА | 1979 |
|
SU848449A1 |
| АВТОМАТИЗИРОВАННОЕ МНОГОЯРУСНОЕ УСТРОЙСТВО | 1993 |
|
RU2043277C1 |
| Шагающий конвейер | 1980 |
|
SU905165A1 |
| Транспортное средство для перевозки длинномерных грузов | 1989 |
|
SU1668179A1 |
| Шаговый конвейер для перемещенияшТучНыХ КРупНОгАбАРиТНыХ гРузОВ | 1979 |
|
SU816886A1 |
| Шагающий конвейер | 1980 |
|
SU935398A1 |
| Тормозной роликовый конвейер с приводом из промежуточных роликов для транспортирования штучного груза | 1988 |
|
SU1743348A3 |
| Устройство для перемещения звеньев путевой решетки на звеноразборочных, звеносборочных и ремонтных линиях | 1975 |
|
SU717207A1 |
| Устройство для перегрузки штучных грузов | 1979 |
|
SU874501A1 |
| Стегальная швейная машина | 1980 |
|
SU931847A1 |
Изобретение относится к подъемно-транспортному машиностроению и м.б. использовано для межоперационного транспортирования. Цель - уменьшение габарита конвейера по высоте. На неподвижной раме 1 конвейера жестко закреплены неподвижные блоки 2 и 3 роликов и установлены подпружиненные подвижные блоки 7 и 8 роликов. Каждый из блоков 2 и 3 расположен . б j4 над соответствующим блоком 7 и 8. Между блоками 2 и 7, 3 и 8 установлены опорные лыжи 9 и 10, закрепленные по две на одной-боковой стороне несущих балок (Б) 11 и 12. На обоих концах каждой лыжи 9 и 10 вьшол- нены скосы. Вдоль Б 11 и 12 с другой боковой стороны расположены зубчатые рейки, находящиеся в зацеплении с синхронизирующими шестернями 13 и 14, Последние установлены на раме 1 и кинематически связаны с приводом перемещения Б 11 и 12. При вращении Б 11 и 12 навстречу друг другу лыжи 9, находя скосом на ролики блоков 2, отжимают блоки 7 роликов и перемещают Б 11 под грузами 19. Лыжи 10, находя обратным скосом на ролики блоков 3, поднимают Б 12 с грузом 19 с рамы 1 и переносят на шаг. При сходе лыж 10 с блоков 3 грузы 19 опускаются с Б 12 на раму 1. При обратном ходе Б 12 проходят под гру- зами 19, а Б 11 поднш;аются, перемещая груз 19. 6 ил. S (Л 3 О5 00 СО СО 16 17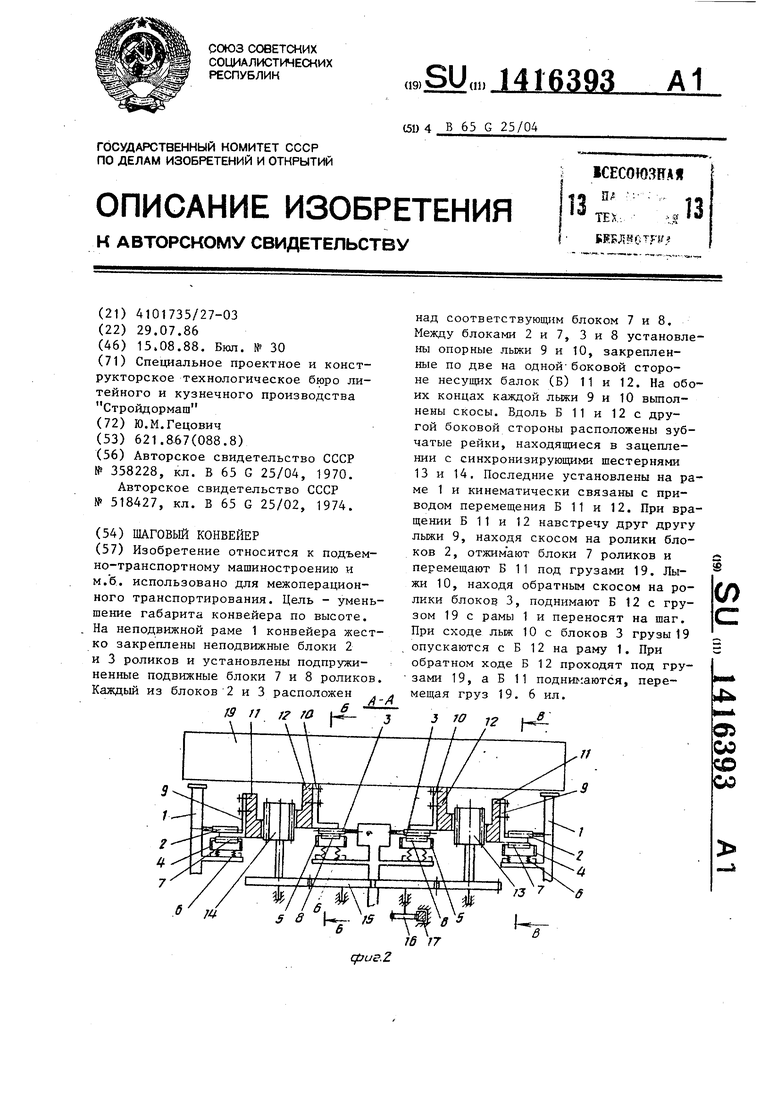
положен над соответствующим подвижг ным блоком роликов, при этом каждая
f X .x R /e 4 ( f f/jfi j .tfff
qjL±7i
/
балки и подвижным блоком роликов при холостом ходе балки.
i2
17
К e.i
(pliS.S
40
В-В
19
12
11
4
.--:ferrn
j(7J
I M УК V
/5
f
fr «
„,Лl;..flJb
f f jrjyff f fff,fCft
Ifl
фибЛ
.Х Ф Ф Ф ;УФХ / Ф/У/Ф
I ер (Ь ф ф (р ( ф-ф-ф-ф ф ,
/// /
фиа.В
Ф///Ф / ф///ф///ф///ф/(
Ф ф ф ФФ ф Фф Ф Ф Ф Ф у I
ери г.6
фиа.В
| 0 |
|
SU358228A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Шагающий конвейер | 1974 |
|
SU518427A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
