ю
Эо
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата и переноса пакета плоских деталей | 1981 |
|
SU973300A1 |
| Автомат для сборки трубного пакета радиатора | 1981 |
|
SU996162A1 |
| Автоматическое грузозахватное устройство | 1984 |
|
SU1184792A1 |
| ГРУППОВОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1999 |
|
RU2170698C1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| Захват для изделий с отверстием | 1990 |
|
SU1791333A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Подвеска грузозахватного устройства | 1983 |
|
SU1119967A1 |
| Шасси транспортного средства дляпЕРЕВОзКи длиННОМЕРНыХ гРузОВ | 1979 |
|
SU839784A1 |
| ЗАХВАТ ДЛЯ МЕШКОВ | 1990 |
|
RU2021197C1 |

Изобретение относится к грузозахватным устройствам. Целью изобретения является повьшение надежности. Грузозахватное устройство снабжено центральным стержнем 4, жестко закрепленным на прижимной плите 5 и пропущенным через центр поперечины 10, и подпружиненной разрезной конусной втулкой 2, размещенной в конусном отверстии рамы каретки, Поперечина 10 установлена в вертикальном пазу I1 рамы каретки с возможностью воздействия на нижнюю часть подпружиненной разрезной конусной втулки 2, прижимная плита подвижно соединена с кареткой при помощи вертикальных планок 6 и штанг 8, а захватные элементы 7 соединены шарнир- но одними концами с нижними концами штанг 8, а другими- с нижними конца-, ми вертикальных планок 6. При подъеме и опускании каретки 1 происходит вертикальное перемещение втулки 2 и фиксация и расфиксация стержня 4. 3 рл. (Л
/77777777f / /fffy fJ f фи.1
1
Изобретение относится к грузозахватным устройствам для автоматического захватывания и освобождения штучного груза, в частности для груза на поддонах, плитах-спутниках и т.п. при передаче их с позиции на позицию в транспортных устройствах при автоматизации производственных процессов в различных отраслях народного -хозяйства.
Целью изобретения является повыш ние надежности работы.
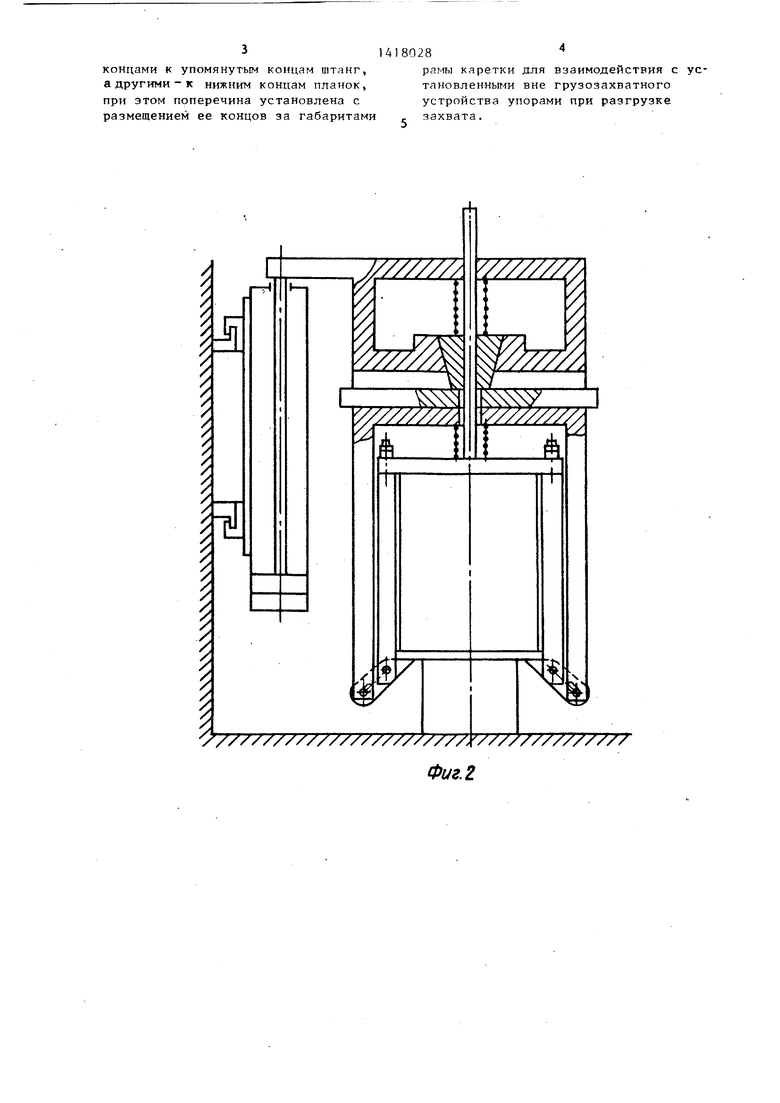
На фиг. 1 показано грузозахватное устройство, исходное состояние перед захватом груза; на фиг. 2 - то же, в момент захвата груза; на фиг. 3 - то же, в момент освобождения от груза.
Грузозахватное устройство содержит каретку 1, в конусном отверстии рамы которой подвижно установлена разрезная (например, состоящая из двух половин) конусная втулка 2 с возможностью вертикального перемещения и взаимодействия с пружиной 3 центральный стержень 4, жестко закрепленный на прижимной плите 5, которая при помощи вертикальшзгх планок 6, захватных элементов 7 и штанг 8 подвижно смонтирована на каретке 1 и подпружинена пружиной 9, поперечину 10, размещенную в вертикальном пазу 11 каретки 1 с возможностью взаимодействия с разрезной втулкой 2 Каретка 1 может совершать возвратно- поступательное движение в вертикальном направлении при помощи гидроцилиндра 12. Направляющие 13 обеспечивают горизонтальное перемещение каретки i с помощью любого привода (не показан). Груз 14 расположен н а плите-спутнике 15. На разгрузочной позиции технологич-еского оборудования имеются столы 16, а на разгрузоч ной позиции - приемные упоры 17.
Грузозахватное устройство работает следующим образом.
На стол 16 устанавливают плиту- спутник 15. После укладки груза 14 подается команда на включение гид- рощшиндра 12, который перемещает каретку 1 вниз. По мере движения каретки 1 вниз прижимная плита 5 ос- танайливается на грузе 14, а штанги 8 воздействуют на захватные элементы 7, которые поворачиваются и заводятся под плиту-спутник 15, при этом пружина 9 сжимается, а раз180282
резная конусная втулка 2 расклинивается и свободно пропускает пент-- ральный стержень 4, сжимая пружину
. центральный стержень 4. После захвата груза подают команду на включен ие гидроцилиндра 12, который переме Q щает каретку 1 вместе с грузом 14 вверх и автоматически переносится в горизонтальном направлении на сле- дущую технологическую операцию. Подают команду на включение гидро15 цилиндра, которьм перемещает каретку 1 вниз. На рагрузочной позиции при опускании каретки 1 в конце ее хода поперечина 10 опирается на приемные упоры 17, надавливает на
20 разрезную втулку 2, расклинивает ее и освобождает центральный стержень
4,который вместе с грузом под действием его веса и силы пружины 9 свободно опускается, раскрьшая
25 захватные элементы 7. Подается команда на подъем каретки 1 и перемещение ее для вьтолнения операций технологического цикла. I
30 Формула изобретения
Грузозахватное устройство, содержащее подъемно-опускную каретку с прикрепленными к ее раме верхними концами штангами, подпружиненную прижимную плиту, связанную с рамой каретки и имеющую жестко закрепленный на ней по крайней мере один стержень, установленный с возможностью перемеАп щения в вертикальных направляющих рамы каретки, и закрепленные на нижних концах штанг захват ные элементы, отличающееся тем, что, с целью повышения надежности, в раме
. каретки выполнен вертикальный паз, а устройство снабжено размещенной в нем с возможностью вертикального перемещения поперечиной, подпружиненной разрезной втулкой с наружной кониче- ской поверхностью, размещенной в коническом отверстии, выполненном в раме каретки, и опирающейся своей нижней частью на поперечину, при этом стержень пропущен сквозь поперечину и втулку, прижимная плита снабжена разме- между штангами и прикрепленными к ней верхними концами вертикальными планками, а захватные элементы гфикреплень шарнирно
35
50
55
концами к упомянутым концам штанг, а другими - к нижним концам планок, при этом поперечина установлена с размещением ее концов за габаритами
1418028
рамы каретки для взаимодействия с тановленными вне грузозахватного устройства упорами при разгрузке захвата.
Фиг.2
//////////
Фиг.З
| Устройство для захвата и переноса пакета плоских деталей | 1981 |
|
SU973300A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
