(Л
00 N9
Од
Изобретения относится к подъемно- транспортной технике, в частности к груэозахватньп устройствам.
Целью изобретения является обеспечение возможности захвата груза в стесненных условиях.
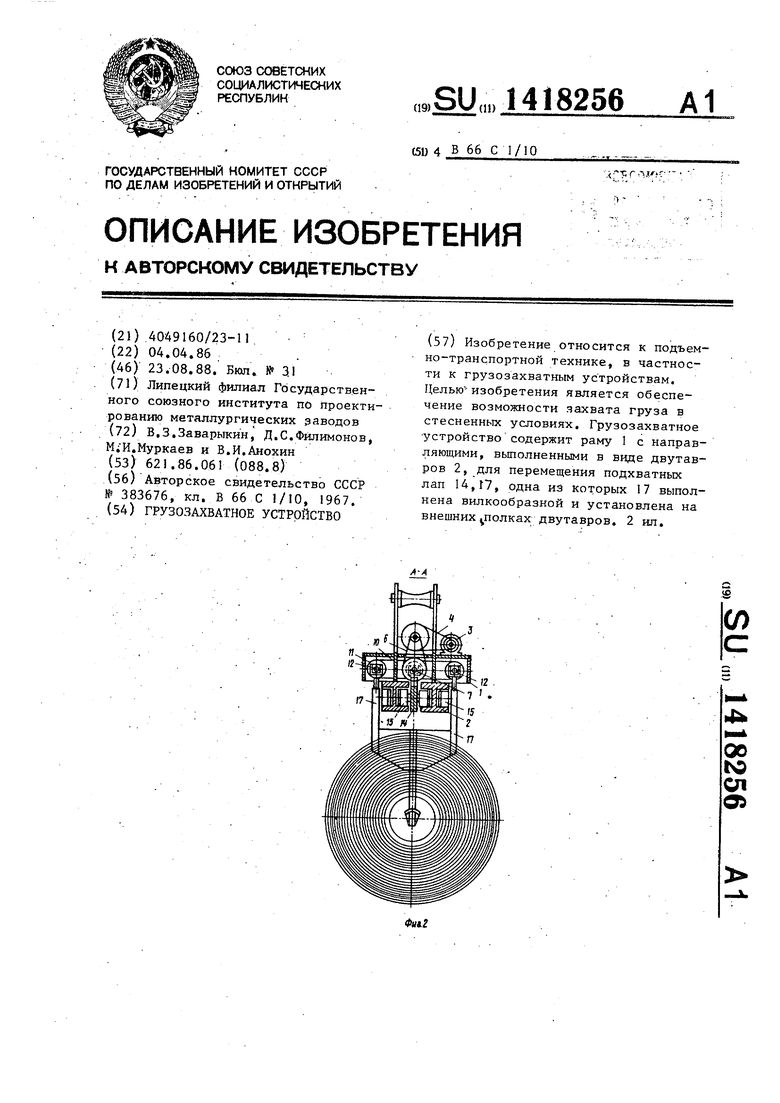
На фиг.1 изображено грузозахватное устройство, общий вид; на фиг,2- разрез А-А на фиг.1.
Грузозахватное устройство содержит раму , к которой снизу прикреп- лены направлякадие - два параллельно расположенных двутавра 2. На раме 1 установлены электродвигатель 3, цеп- |ная передача 4, фрикционная муфта 5, Цепная передача 6, центральная винто вая передача 7, которая имеет звез- дочку 8 для цепной передачи и две звездочки 9 для двух цепных передач 10, передающих вращение на две звездочки 11, установленные на двух винтовых передачах 12, расположенных по обе стороны от центральной i винтовой передачи 7. Центральная винто- вая передача 7 имеет гайку 13 с левой/ резьбой , соединенную с подхват ной лапой 14, четыре катка 15 которой установлены на внутренних полках двутавра. 2. Боковые винтовые переда- чи 12 имеют гайки 16 с правой резьбой, . соединенные с подхватной лапой 17, выполненной вилкообразной, четыре катка 15 которой установлены
на внешних полках двутавра 2.
Грузозахватное устройство работает следующим образом.
В исхюдном положении подхватные лапы 14 и 17 раздвинуты. Грузозах- ватное устройство, навешенное на грузоподъемный механизм, подводят к рулону металла так, чтобы лапы 14 и 17 оказались приблизительно напротив отверстия рулона. Включают элек- тродвигат ель 3. Через цепную передачу 4, фрикционную муфту 5, цепную
0
5 0 5 0
5
0 j
передачу 6 вращение передается на звездочку 8 и центральную винтовую передачу 7, от которой далее вращение передается через звездочки 9, цепные передачи 10 на звездочки 11 и боковые винтовые передачи 12. Центральная винтовая передача 7 через ; гайку 13 приводит в движение под- хватную лапу 14, одновременно боковые винтовые передачи 12 через гайки 16 приводят в дв1 жение подхват- ную лапу 17. Катки 15.лап 14 и 17 движутся по внешним и внутренним полкам двутавров 2 параллельно друг другу, В результате лапы 14 и 17 сближаются и своими выступами входят в. полую часть рулона до упора в торцы, после чего фрикционная муфта 5 отключает злектродвигатель 3. Рулон переносят и устанавливают в необходимом месте. Далее включают электродвигатель 3 на разжатие лап 14 и 17 до конечного положения. После этого грузозахватное устройство готово для осуществления захвата следующего рулона.
Форм у л а изобретения
Грузозахватное устройство, содержащее присоединяемую подвеской к подъемной машине раму с направляющими в нижней ее части, подвижные в горизонтальной плоскости от винтового привода подхватные лапы с катками, установленными на направляющих, отличающе е ся тем, что, с целью обеспечения возможности груза в стесненных условиях, направляющие выполнены в виде двух параллельных двутавров, при этом одна под- хватная лапа вьшолнена вилкообразной в верхней.части и установлена на внешних полках двутавров, а другая подхватная лапа установлена на внутренних полках двутавров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
| Грузозахватное устройство | 1989 |
|
SU1731717A1 |
| Грузозахватное устройство | 1987 |
|
SU1643404A1 |
| Грузозахватное устройство | 1990 |
|
SU1794847A1 |
| Грузозахватное устройство | 1988 |
|
SU1588688A1 |
| Грузозахватное устройство | 1989 |
|
SU1675187A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Захватное устройство | 1983 |
|
SU1181977A1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| Грузозахватное устройство | 1985 |
|
SU1321660A1 |

Изобретение относится к подъемно-транспортной технике, в частности к грузозахватным устройствам. Целью изобретения является обеспечение возможности захвата груза в стесненнмх условиях. Грузозахватное устройство содержит раму 1 с направляющими, вьтолненными в виде двутавров 2, для перемещения подхватных лап 14,17, одна из которых 17 выполнена вилкообразной и установлена на внешних полках двутавров. 2 ил.