4;:
ю
СП
ю
сд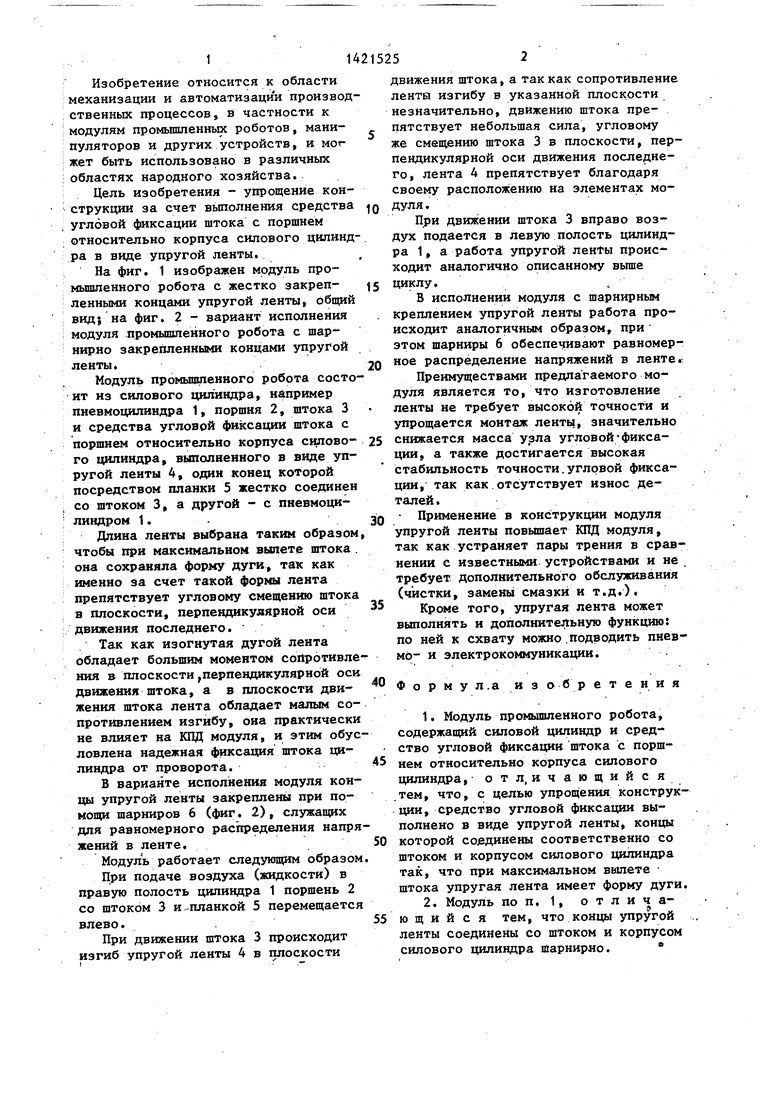
| название | год | авторы | номер документа |
|---|---|---|---|
| С-ОБРАЗНЫЕ ШТОКОВЫЕ КЛЕЩИ ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ ЭЛЕКТРОСВАРКИ, ВСТРОЕННЫЕ В РОБОТ | 2001 |
|
RU2221681C2 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| Модуль промышленного робота | 1985 |
|
SU1299780A1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2211344C1 |
| Устройство для внутритрубной роботизированной механической очистки поверхности трубопроводов | 2024 |
|
RU2837919C1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| Устройство для гибки обечаек из листовых заготовок | 1978 |
|
SU770609A2 |
| РАБОЧЕЕ ОРУДИЕ | 1991 |
|
RU2046885C1 |
| Способ определения деформации элементов конструкции дельта-робота, которая проявляется только в процессе его движения | 2020 |
|
RU2754423C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2200857C2 |
.7
Изобретение относится к области механизации и автоматизаци и производственных процессов, в частности к модулям промьшшенньк роботов, манипуляторов и других устройств, и мо«- жет быть использовано в различных областях народного хозяйства.
Цель изобретения - упрощение конструкции за счет выполнения средства угловой фиксации штока с поршнем относительно корпуса силового цилиндра в виде упругой ленты.
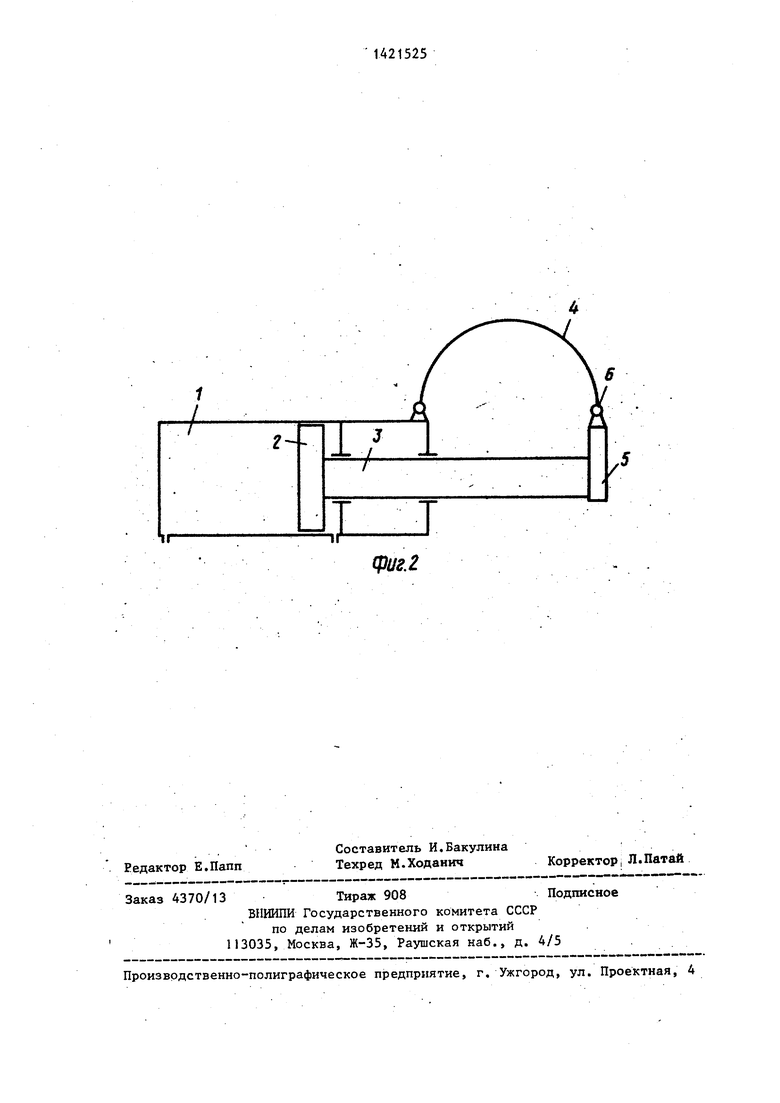
На фиг. 1 изображен модуль про- мьшшенного робота с жестко закреп- ленными концами упругой ленты, общий ВИД) на фиг. 2 вариант исполнения модуля промышленного робота с шар- нирно закрепленными концами упругой ленты.
Модуль промышленного робота состоит из силового цилиндра, например пневмоцилиндра 1, поршня 2, штока 3 и средства угловой фиксации штока с поршнем относительно корпуса силово- го цилиндра, выполненного в виде упругой ленты 4, один конец которой посредством планки 5 жестко соединен со штоком 3, а другой - с пневмоци- линдром 1. .
Длина ленты выбрана таким образом чтобы при максимальном вылете штока . она сохраняла форму дуги, так как именно за счет такой формы лента препятствует угловому смещению штока в плоскости, перпендикулярной оси движения последнего. .
Так как изогнутая дугой лента обладает большим моментом сойротивле ния в плоскости перпендикулярной оси движения штока, а в плоскости движения штока лента обладает малым сопротивлением изгибу, она практически не влияет на КПД модуля, и этим обусловлена надежная фиксация штока цилиндра от проворота.
В варианте исполнения модуля концы упругой ленты закреплены при по- мош;и шарниров 6 (фиг. 2), служащих для равномерного распределения напряжений в ленте.
Модуль работает следующим образом
Цри подаче воздуха (жидкости) в правую полость цилиндра 1 поршень 2 со штоком 3 и планкой 5 перемещается влево. .
При движении штока 3 происходит изгиб упругой ленты 4 в плоскости
1
Q
0
5 0
0
5
5
0
5
движения штока, а так как сопротивление лента изгибу в указанной плоскости незначительно, движению штока препятствует небольшая сила, угловому же смещению штока 3 в плоскости, перпендикулярной оси движения последнего, лента 4 препятствует благодаря своему расположению на элементах модуля.
При движении штока 3 вправо воздух подается в левую полость цилиндра 1 , а работа упругой ленты происходит аналогично описанному зътг циклу.
В исполнении модуля с шарнирным креплением упругой ленты работа происходит аналогичным образом, при этом шарниры 6 обеспечивают равномерное распределение напряжений в ленте.:
Преимуществами предлагаемого модуля является то, что изготовление ленты не требует высокой точности и упрощается монтаж ленты, значительно снижается масса узла угловой-фиксации, а также достигается высокая стабильность точности.угловой фикса ции, так как.отсутствует износ деталей.
Применение в конструкции модуля упругой ленты повышает КПД модуля, так как устраняет пары трения в сравнении с известными устройствами и не . требует дополнительного обслуживания (чистки, замены смазки и т.д.).
Кроме того, упругая лента может выполнять и дополнительную функцию: по ней к схвату можно.подводить пнев- мс)- и электрокоммуникации.
Форму л.а и 3 обр е т е н и я
.тем, что, с целью упрощения конструкции, средство угловой фиксации выполнено в виде упругой ленты, концы которой соединены соответственно со штоком и корпусом силового цилиндра так, что при максимальном вылете штока упругая лента имеет форму дуги,
2,Модуль по п. 1, отличающийся тем, что концы упругой ленты соединены со штоком и корпусом силового цилиндра шарнирно.
фиг.2
| Тимофеев А.Н | |||
| Расчет и конструирование несущих конструкций модулей степеней подвижности промышленных роботов | |||
| Учебное пособие | |||
| -Л.: ЛПИ, 1982, с | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
