S- е
Г
в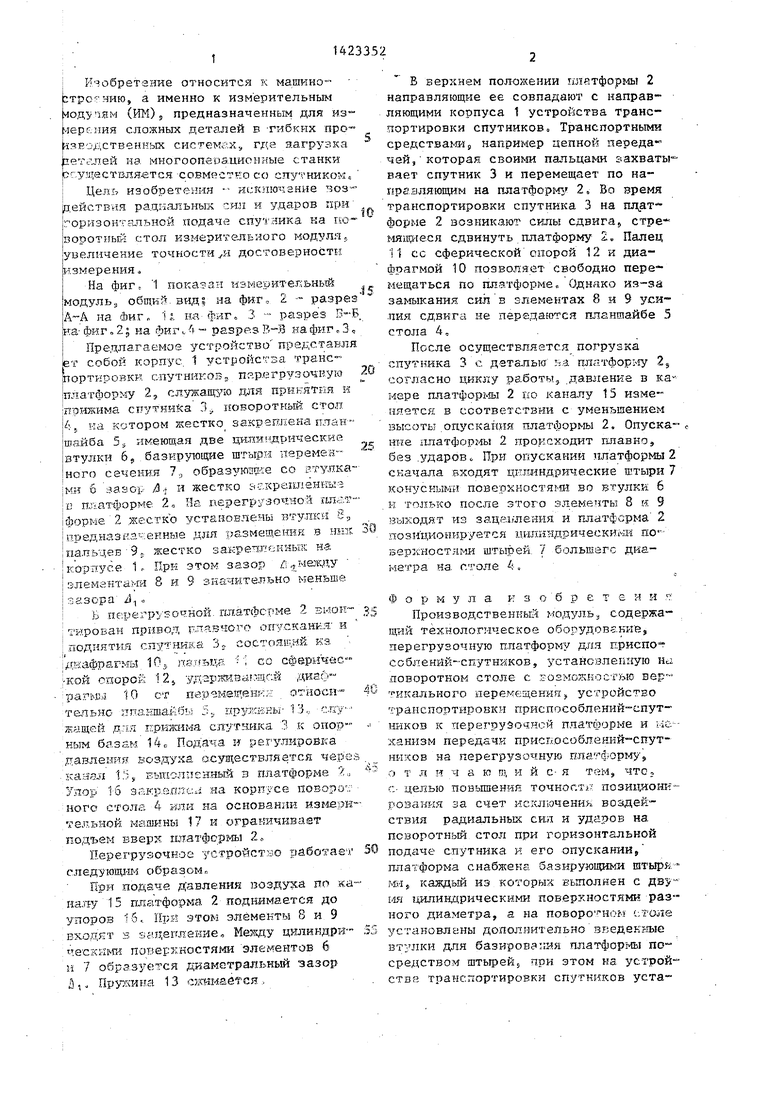
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для закрепления приспособления-спутника | 1975 |
|
SU524670A1 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
| Многоцелевой станок | 1981 |
|
SU1036490A1 |
| Металлорежущий станок | 1990 |
|
SU1830333A1 |
| Устройство для фиксации втулок в плите-спутнике | 1986 |
|
SU1400848A1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ В РАБОЧЕЕ ПОЛОЖЕНИЕ | 1998 |
|
RU2149094C1 |
| Станок для шлифования торцевых поверхностей деталей | 1981 |
|
SU1116976A3 |
| УСТРОЙСТВО ДЛЯ БАЗИРОВАНИЯ СТОЛА-СПУТНИКА | 1993 |
|
RU2102217C1 |
| Многооперационный станок | 1982 |
|
SU1096082A1 |
| Автоматическая сборочная линия | 1987 |
|
SU1590339A1 |
Иэобретенке относится к области машиностроения, а именно к.нзмери-. тельным модулям, предназначенным-Для измерения слолсных деталей в гибких производст,веннь х системах, где загрузка деталей ка многооперационные станки осуществляется совместно со спутником. Целью изобретения является повышение точности позиционирования спутника на столе станка за счет исключения воздействия радиальных сил и ударов на стол при перегрузке на него спутника. При пере- грузке спутника платформа 2 стола 4 поднимается и позиционируется относительно корпуса 1 устройства транспортировки спутников посредством втулок 8, установленньк на ней, и пальцев 9, установленных на корпусе 1. При этом зазор, образованный элемен- TaMii 8 и 9, меньше зазора й , образованного базирующими штырями 7 плат- и втулками 6 стола. При перемещении спутника 3 на платформу 2 возникающие силы сдвига замыкаются на элементах 8 и 9 и не оказывают воздействия на стол 4, 4 ил. (Л с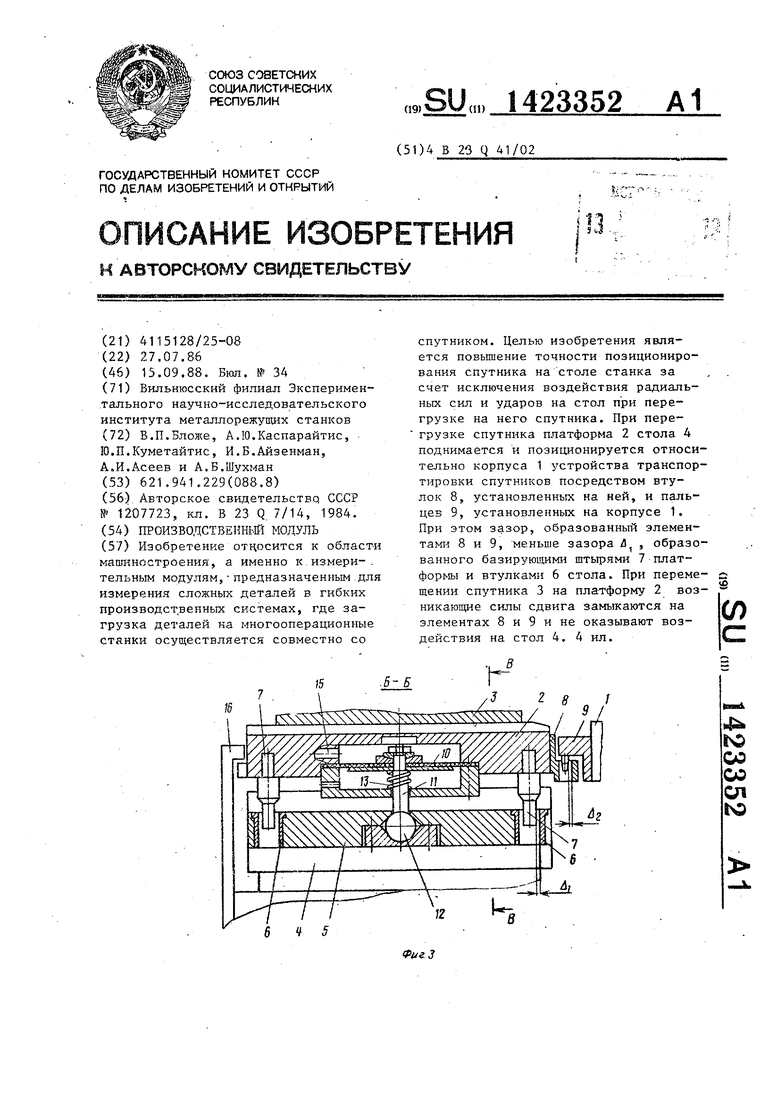
.15
/
2 8
/ /
/ /
/
а
4 ю
ОО 00
01
ю
Ичобретание относится к машино- гтрогнию, а именно к измерительным yioAV iSM (ИМ) 5 предназначенным для из терс.иия сложных деталей в тибких про- изкодственнык системах, где яагрз зка детс л7.ей на многоопеоаиионные станки сс,ущаствля«тся совместно ссз спутником I Цель изобретения - иск почание воз- рействия радмапьных сил и ударов при горизонтальной подаче спутника ка гю воротньй стол из24ерительного модуля s увеличение точности д достоверности измерения о
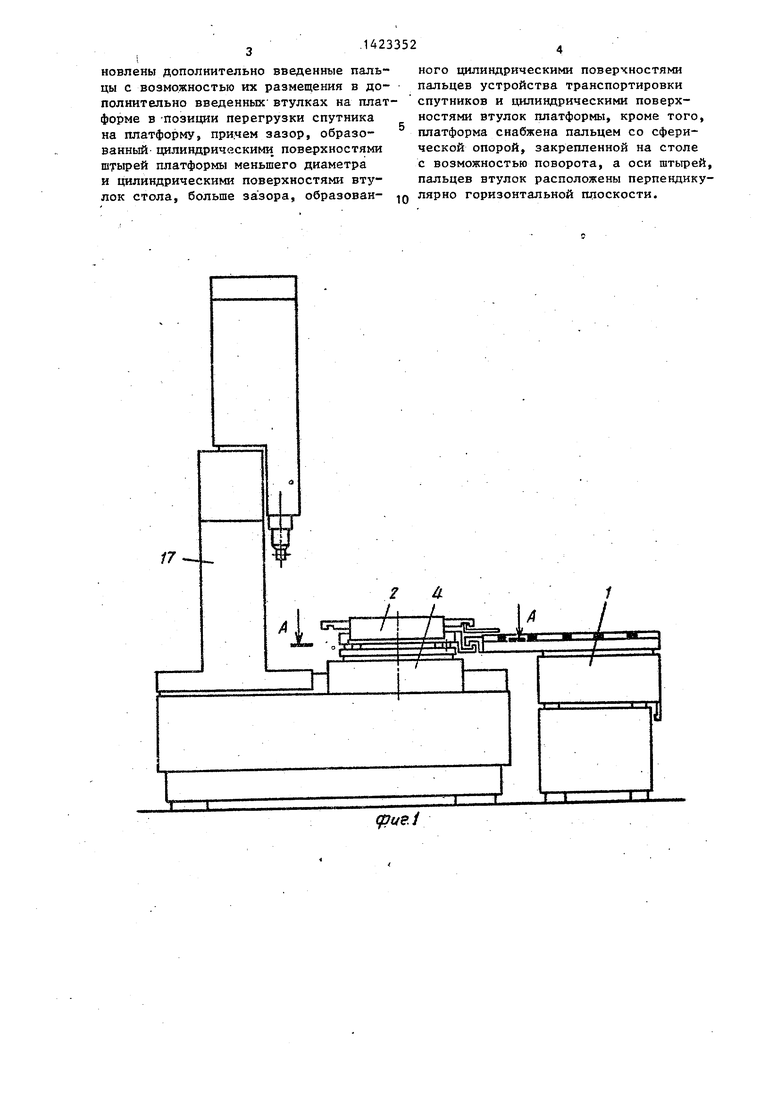
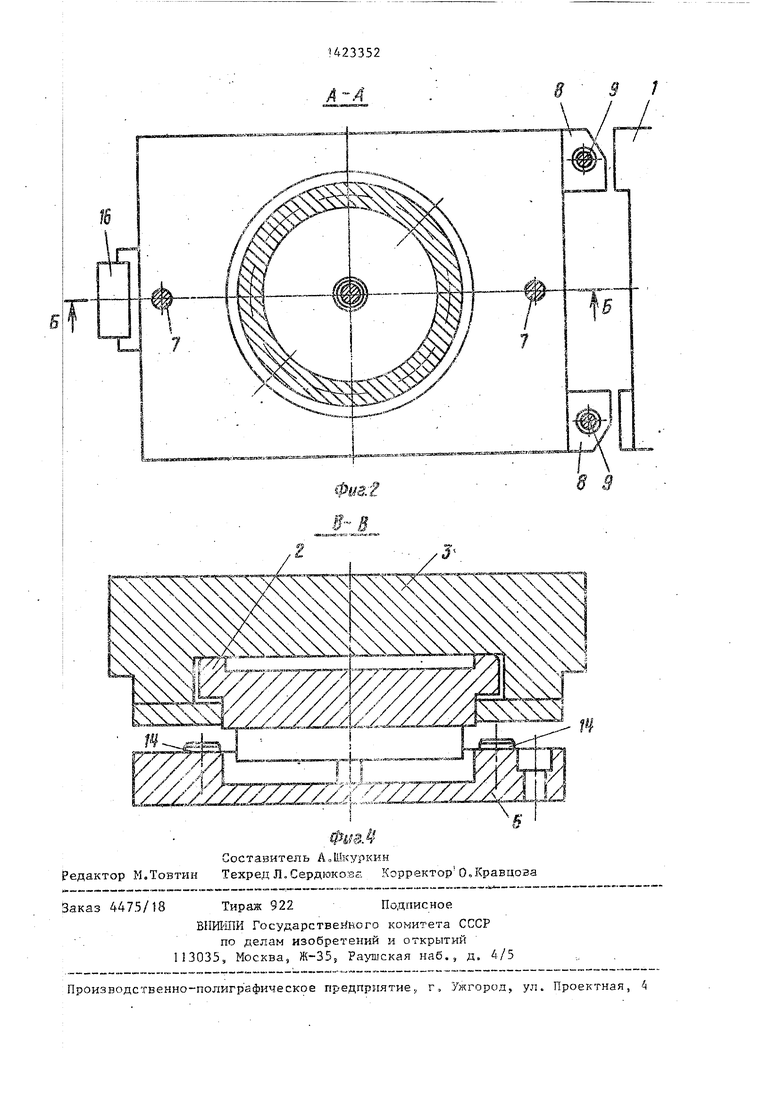
На фиг 1 показан измерительный модульэ общий.знд на фиг, 2 - разрез на Фиг,, 1 i на фиг. 3 - разрез Б-Б на- фиг«2; на фиг t - разрез на фиг. 3,
Предлагаемое устройство прадставля собой корпус, 1 устройства транс-- ортировки спутников,, пр-р.е груз очкую Ьлатфор у 2j служащую для принятия к Ьрюкима спутника 3,, поворотный стоп |4,, ка котором жестко закреплена план- |шайба 5s имеющая две дили Здрические втулки 6, базкрзпощие штыри перемен- ного сечения 7, образуюаще со втулка- |ми б зазор /3-J и жестко эгкреишенкые в платформе 2, На перегрузочной гшйт- форме 2 жестко установлены втупки ;, I предназначенные для размещеник в mir пальцев 9; жестко закреяленны;;: на корпусе Ь При этом зазор й,,,мезкду |элеманта 1И 8 и 9 зкачнтельно меньше I зазора Л ,
Б перегрузочной.платформе 2 ЕИОН- 1 ирован привод цлавяого опускания и I поднятия спутника 3„ еостояшнй ка - 1 днафрагмы Юз; , со сферичес- кон опорой 12j удгрл квй дсй дкао- рагмы 10 от пеоемещенкн относи-- тельно П1лантакбь; 5., прз яжны- Г: },, слу жащей д.:т.я пркжимя 3 .к опор- ньм базам 14с и регулировка давления воздуха асуществляется черей кан5л 1..;, ЕЫТюлпенньгЯ з платформе 2„ Улор 16 закр.аппеа на корпусе побори-;: него стола 4 или на основании измерительной машины 17 к ограгетчивает noAt-eM ввер: : платформы 2
Перегрузочное устройство работае ). следующ-ш образом,,
При подаче д авления воздуха по ка- нахр; 15 ппатформа 2 поднимается до упоров 15, При этом элементы 8 и 9 входят S задепяание, Мезкд,у цш1индри™ tтecки ffi поверккостями элементов 6 н 7 образуется дт амстральный зазор Л , о Пруяина 13 cjxHMaetcH ,
o
S
0
5
0
В верхнем пол-ожении платформы 2 направляющие ее совпадают с направляющими корпуса 1 устройства транспортировки спутников Транспортными
средствамиS например цепной переда чай, которая своими пальцами захватывает спутник 3 и перемещает по на яразляющнм на платфорг-Г; 2. Во время транспортировки спутника 3 на пдат- форме 2 возникают силы сдвига,, стре- t-iHiuii-iecH сдвинуть платформу 2. Палец 11 ее сферической опорой 12 и диафрагмой 10 позволяет свободно перемещаться по платформе Однако из-за замыкания сил в злементах 8 и 9 усилия сдвига не передаЕотся планшайбе 5 стола 4,
После осуществляется погрузка спутника 3 с деталью s.a гшатфорь-гу 2, согласно циклу работы,, давление в ка-- мере платфоргфт 2 ко каналу 15 изме™ няетск в соответствии с уменьшением высоты ,одускайня плaтфop Ы 2, Опускание алатфор.чь 2 происходит плавно, без .ударов При опускании илатформы 2 скачала входят цк.гшндрические штыри 7 конуснь ми поверхностям во втулки 6 , к TOj:cbKO после зтого зл. 8 к 9 гзыкодят из зацвхшвния и платформа 2 пози цконируется цилиндрическим- по-- Берхност.нмн штырей. 7 большего диаметра йа столе 4.
Ф о р мула к 3 о б р е т в н и : Производственньй модуль,, содержа- ЩИ.Й технологическое оборудоваки е, перегрузочную платформу для приспо- собленйй-спутников, установлениую на .поворотном столе с .возмога-юстУгЮ вертикального пере.мещенип, устройство транспортировки приспособленнй-спут- HPIKOB к перегрузочной платформе и ;.-;С ханизм передачи присп.особлений-спут- ников на перегрузочную гшатформу, о т д и ч & ю го, и и с- я тем, что, с- целью повышения точност ; позипдош- - рования за счет ксключенн.к воздействия радиальных сил и ударов на поворотный стол при горизонтальной подаче с.пут.ника и его опускании/ платформа снабжена базирующими штырк Mi-ij каждый из которых выполнен с дву- 14Я лилиндрическими поверхностями разного диаметра, а на поворотном установлены дополнительно введенные втулки для базирования платфор Ф посредством штырейS при этом на устройстве транспортировки спутников установлены дополнительно введенные пальцы с возможностью их размещения в дополнительно введенных втулках на платформе в -позиции перегрузки спутника на платформу, примем зазор, образованный цилиндрическими поверхностями штырей платформы меньшего диаметра и цилиндрическими поверхностями втулок стола, больше зазора, образован17
ного цилиндрическими поверхностями пальцев устройства транспортировки спутников и цилиндрическими поверхностями втулок платформы, кроме того, платформа снабжена пальцем со сферической опорой, закрепленной на столе с возможностью поворота, а оси штьфей, пальцев втулок расположены перпендикулярно горизонтальной плоскости.
j 1 1ГРП
rj ij|i.;tuai
f
(ue.l
редактор М.Товтин
Фив.
Составитель А„Шкуркин
Техред Л.Сердюковс. Корректор О,Кравцова
5 ;
| Авторское свидетельство, СССР } 1207723, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
