щенных на боковинах 12 каркаса секций 1, 4 и 5.
Привод 20 валов 8 и 13 роликов 7 и 16 расположен в стойке 21 секции 3 и связан цепной передачей 22 с одним из валов 13, 5 который через расположенные на его обоих концах спаренные звездочки 10 связан с валами 8 и 13 основной и дополнительной транспортных ветвей.
Транспортная система работает следую- 10 ш,им образом.
Под воздействием привода 20 через цепную передачу 22 связанные попарно между собой цепными передачами валы 8 и 13 получают вращение. При этом расположенные
|мы с устройством для считывания кода one- валах ролики 7 и 16, нагруженные |рации на спутнике; секции 2, представляю-- торцовым усилием пружин 9 и 17, также получают вращение. Спутники с собираемыми изделиями, лежащие на вращающихся роликах 7, перемещаются по основной ветви транспортной системы. При этом каретки
iKOB с дополнительной ветви транспортной 20 14 секций 2 и 3 находятся в зоне основной системы на основную; секции 4. являющейся ветви. Расположенные на них остановы 18 1участко.м основной транспортной ветви, и спутников открыты под воздействием толка- Iсекции 5, являющейся участком дополнитель- телей 19. По сигналу технологической станции 6 включается считывающее устройство 25 23 на секции 1, которое отбирает спутник с нужным кодом и останавливает его на каретке 14 секции с помощью расположенных на ней остановов 18, которые автоматически закрываются при прекращении на них воздействия толкателей 19. После этого под воз- 30 действием цилиндра 15 каретка 14, расположенные между ее боковыми направляющими ролики 16, пружины 17 и находящийся на роликах 16 спутник перемещаются по приводным валам в зону дополнительной ветви. При этом связанные с приводом валы 13
Изобретение относится к станкостроению и может быть использовано в транспортных системах гибких автоматических сборочных спутниковых линий.
Цель Исюбретения - упрощение конструкции - обеспечивается возможностью Выполнения двух различных элементов ли- |нии за одно целое.
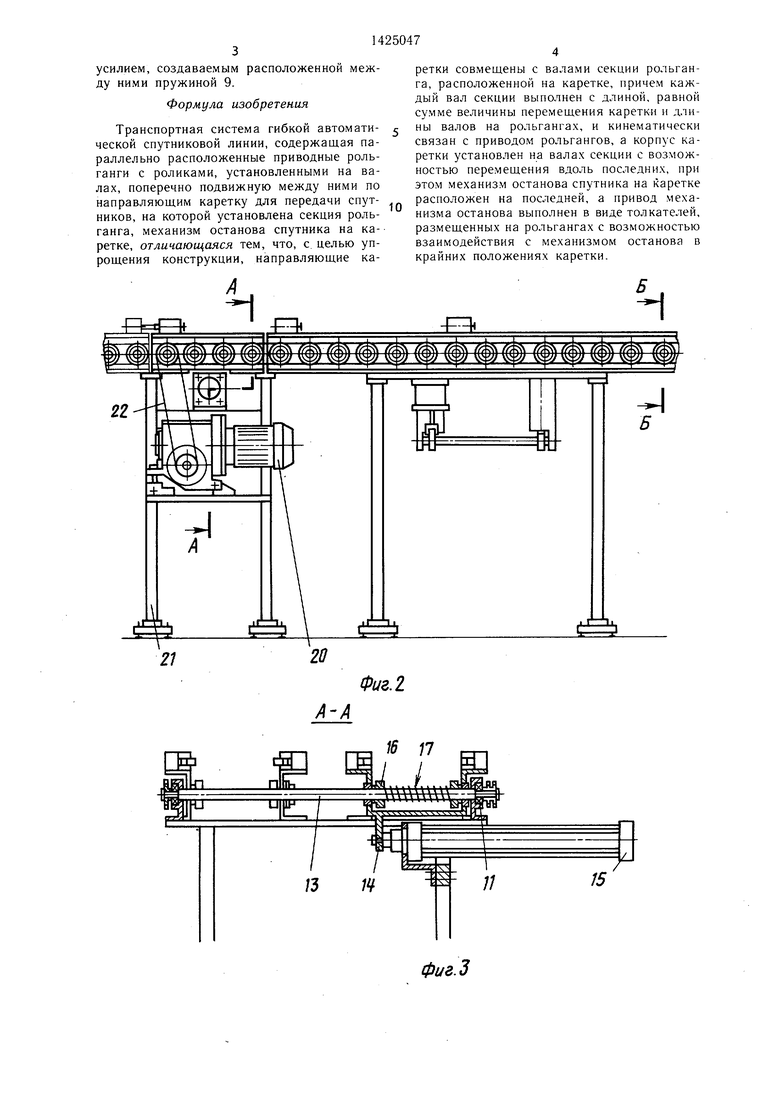
Па фиг. 1 изображена транспортная сис- тема, план; на фиг. 2 - транспортная систе- |ма, вид сбоку; на фиг. 3 - разрез А-А |на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2. i Транспортная система состоит из пяти |связанных между собой секций: секции 1 |участка основной ветви транспортной систеидей собой устройство для передачи спутников с основной ветви транспортной системы на дополнительную; секции 3, представляю- |щей собой устройство для передачи спутнинои ветви транспортной системы, с расположенной на ней технологической станцией 6. Секции выполнены в виде приводных рольгангов с роликами 7. Ролики 7 попарно расположены с радиальным зазором на |приводном валу 8. Между каждой парой ро- |ликов 7 на этом же валу размещена пружи- |на 9 сжатия.
I Валы 8 связаны цепными передачами
|через звездочки 10 друг с другом. Приводные
валы 8 установлены на опорах 11 качения
в боковинах 12 каркаса секций 1, 4 и 5. Па
секциях 2 и 3, являющихся устройствами
для передачи спутников между ветвями 35 продолжают вращаться, а перемещающиетранспортной системы, приводные валы 13 являются едиными для основной и дополнительной транспортных ветвей. Эти валы установлены па опорах 11 качения в боковинах каркаса секций 2 и 3, при этом одна боковина расположена на основной ветви транс- нортной системы, а вторая - на дополнительной. Па секциях 2 и 3 на приводных валах 13 установлены с возможностью пере- вдоль них каретки 14, связанные с приводом их перемещения, выполненным в виде силового цилиндра 15, три этом длина валов 13 равна сумме величины перемещения каретки 14 и длины валов 8.
Между боковинами каретки 14 располося вдоль них ролики 16, тянущая способ- пость которых определяется усилием пружины 17, не вращаются, а пробуксовывают на валу 13.
4Q Как только каретка 14 окажется в зоне дополнительной ветви, расположенные на секции 5 толкатели включаются и открывают остановы 18 на каретке 14. Сопротивление движению спутника исчезает и ролики 16 перестают пробуксовывать на валу 13, спут ник получает возможность пере.мещаться по рольгангу дальще к технологической станции 6. После выполнения технологической операции по сигналу станции 6 в зону дополнительной ветви вызывается к-аретка 14 секжены общие для основной и дополнительнойCQ нии 3 и а1-1алогичным образом спутник перетранспортных ветвей ролики 16 с пружинамидается с дополнительной ветви транспортной 17 сжатия между ними. Ролики 16 и пружи-системы на основную. При остановах спутни- ны 17 имеют возможность перемещения сов-ков при накоплении их на секциях 1, 4 и 5 местно с кареткой 14 вдоль валов 13, явля-или при остановках потока во время работы ющихся для них направляющими. Па боко-кареток 14 секций 2 и 3, находящиеся под винах каретки 14 расположены нормальпо55 спутниками ролики 7, расположенные на закрытые остановы 18 спутников, уп равляе-приводных валах 8, также не вращаются, мые в крайних положениях кареток 14 са пробуксовывают на них. Тяговое усилие помощью приводных толкателей 19, разме-роликов 7 также определяется торцовым
35 продолжают вращаться, а перемещающиеся вдоль них ролики 16, тянущая способ- пость которых определяется усилием пружины 17, не вращаются, а пробуксовывают на валу 13.
4Q Как только каретка 14 окажется в зоне дополнительной ветви, расположенные на секции 5 толкатели включаются и открывают остановы 18 на каретке 14. Сопротивление движению спутника исчезает и ролики 16 перестают пробуксовывать на валу 13, спут ник получает возможность пере.мещаться по рольгангу дальще к технологической станции 6. После выполнения технологической операции по сигналу станции 6 в зону дополусилием, создаваемым расположенной между ними пружиной 9.
Формула изобретения
Транспортная система гибкой автоматической спутниковой линии, содержащая параллельно расположенные приводные рольганги с роликами, установленными на валах, поперечно подвижную между ними по направляющим каретку для передачи спутников, на которой установлена секция рольганга, механизм останова спутника на каретке, отличающаяся тем, что, с целью упрощения конструкции, направляющие ка0
ретки совмещены с валами секции рольганга, расположенной на каретке, причем каждый вал секции выполнен с длиной, равной сумме величины перемещения каретки и длины валов на рольгангах, и кинематически связан с приводом рольгангов, а корпус каретки установлен на валах секции с возможностью перемещения вдоль последних, при этом механизм останова спутника на каретке расположен на последней, а привод механизма останова выполнен в виде толкателей, размещенных на рольгангах с возможностью взаимодействия с механизмом останова в крайних положениях каретки.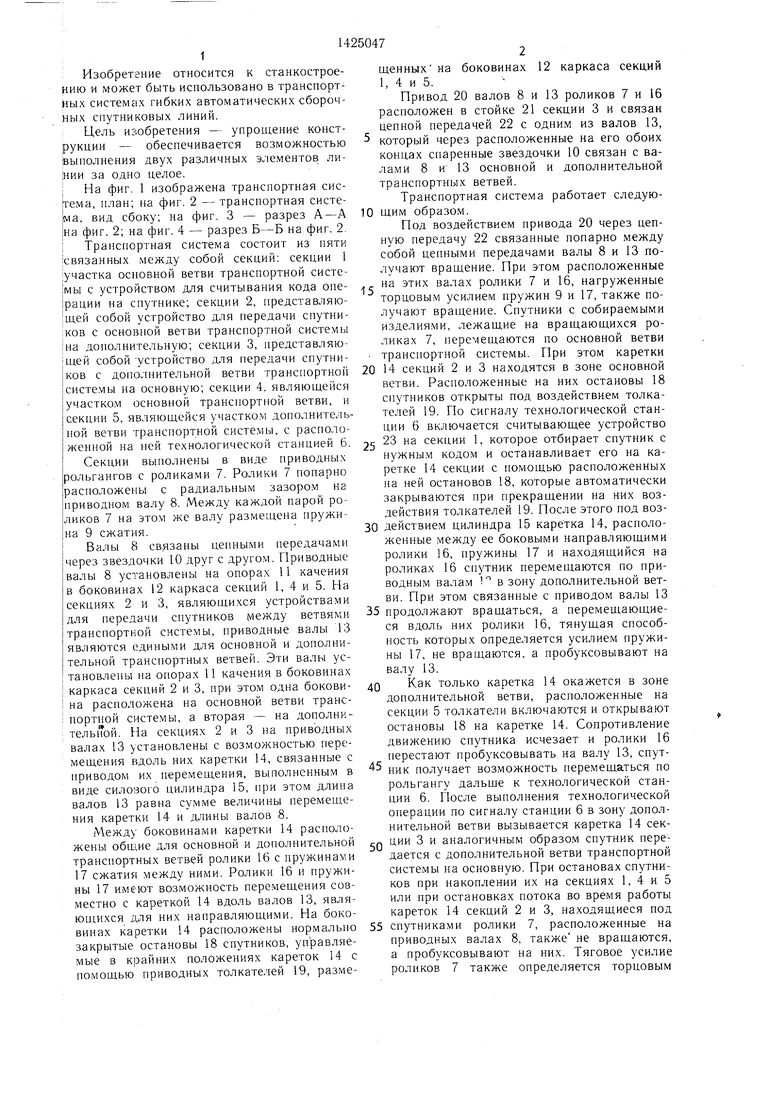
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1987 |
|
SU1590339A1 |
| ГЕРМЕТИЗАЦИОННЫЙ АГРЕГАТ ДЛЯ ОБРАБОТКИ ЭКИПИРОВАННЫХ ФИЛЬТР-ЭЛЕМЕНТАМИ КОРПУСОВ СЕКЦИЙ ФИЛЬТРУЮЩИХ КОРОБОК | 1992 |
|
RU2045357C1 |
| Автоматическая сборочная линия | 1985 |
|
SU1299772A1 |
| Полуавтоматическая линия для сборки обуви | 1975 |
|
SU526347A1 |
| Конвейер для несинхронной сборки | 1989 |
|
SU1728097A1 |
| Автоматическая линия Свиноренко для технологической обработки радиоэлементов | 1986 |
|
SU1426755A1 |
| Способ обработки длинномерного проката и автоматический комплекс для его осуществления | 1987 |
|
SU1625557A1 |
| Автоматизированная сборочная линия | 1981 |
|
SU1013212A1 |
| Транспортная система автоматической линии сборки | 1984 |
|
SU1166967A1 |
| СТЕНД ДЛЯ СБОРКИ ПУЧКА ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 1990 |
|
SU1748381A1 |

Изобретение относится к станкостроению и может быть использовано в транспортных системах гибких автоматических сборочных спутниковых линий. Цель изобретения - упрощение конструкции за счет обеспечения возможности выполнения двух различных элементов линии за одно целое. Система состоит из пяти связанных между собой секций: секции 1 участка основной ветви транспортной системы с устройством для считывания кода на спутнике; секции 2 для передачи спутников с основной ветви на дополнительную/секции 3 для передачи спут- НИКОВ с дополнительной ветви на основную; секции 4 участка основной транспортной ветви и секции 5 участка дополнительной ветви с технологической станцией 6. Секции 1,4 и 5 выполнены в виде приводных рольгангов с роликами и помещенной между ними пружиной, которые расположены на приводном валу 8. На секциях 2 и 3 приводные валы являются едиными для основной и дополнительной ветвей. На валах, являющихся одновременно направляющими, установлены с возможностью перемещения вдоль них каретки. Между боковинами каретки расположены ролики с помещенной между ними пружиной, которые являются общими для основной и дополнительной ветвей и имеют возможность перемещения совместно с кареткой вдоль вала. На боковинах каретки 14 расположены нор.мально закрытые остановы 18 спутников, управляемые в крайних положениях кареток с помощью приводных толкателей 19. 4 ил. (Л tvD сл о 4 
Фиг. 2
16 17
фиг.З
ФигМ
| Транспортная система прокатного стана КВАРТО.Проспект фирйы SIEMAG, ФРГ | |||
| Катодная трубка Брауна | 1922 |
|
SU330A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
