NJ
Л
О о
//
U
и
п
4
lN3
01
о
4
00
о а
и
/ /
4
фue.i
Изобретение относится к станкостроению и может быть иснользовано в транспортных системах гибких линий.
Цель изобретения - упронление конструкции системы автоматического адресования - обеспечи1шется возможностью опознания снутника но наличию или отсутствию на об- рап;енной к считывателю грани адресной метки, а также возможностью переадресования CHVTHHKOB путем поворота к считыва- те, 1ю соответствующей грани спутника.
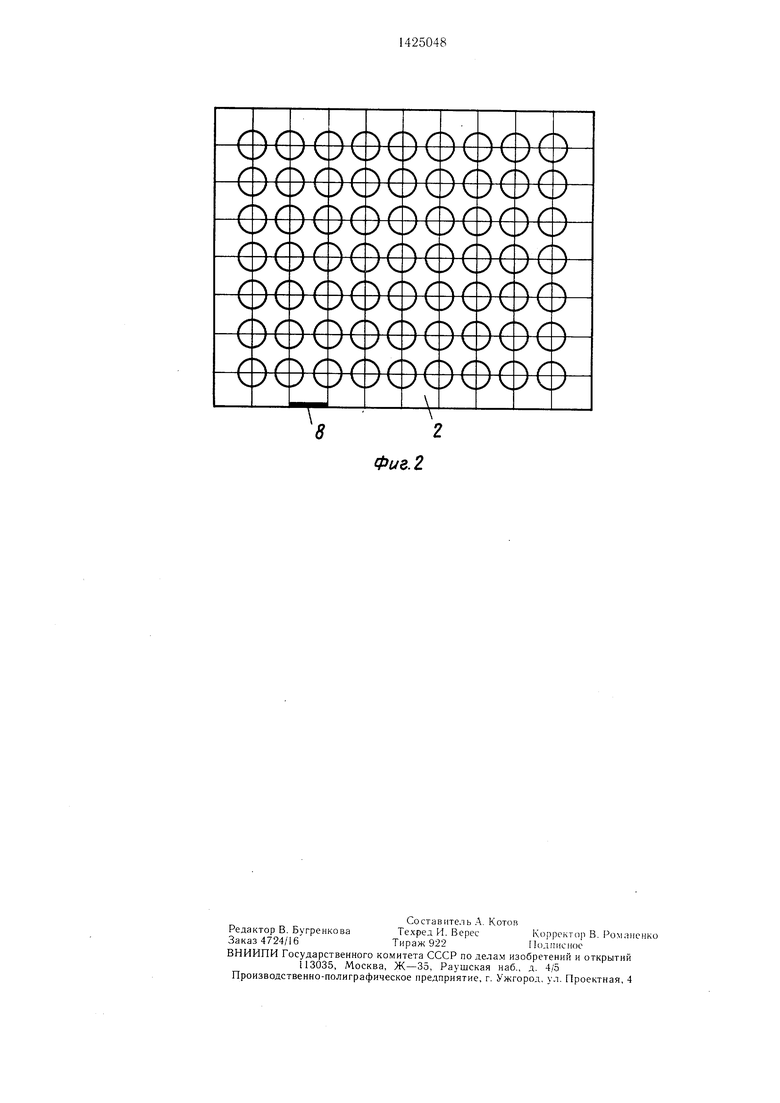
На фиг. 1 изображена схема автоматический нереналаживае.мой линии, реализующая предлагаемый способ, вид сверху; на фиг. 2 - многоместный спутник с адресной меткой.
Переналаживаемая автоматическая линия содержит расположеннЕяе вдоль транспортной системы 1 с многоместными спутниками 2 две группы.нараллельно работаю- 1ПИХ (выполняющие одну операцию на де- та;1ях од|{огч) наименования) станков 3 и 4. В линии также установлены по одному станку 5 и 6, выполняющих носледовательно две другие операции.
Каждый станок имеет свое загрузочное устройство 7 для перемещения многоместных спутников 2 с транспортной системы на при- емпую позицию.
Спутники 2 имеют адресную метку 8, выполненную, напри.мер, в виде паза, расположенного на определенном расстоянии от ее торца на боковой поверхности. На транспортной системе 1 на позициях 9 нодачи многоместных спутников 2 с транснортной системы 1 на приемную позицию станка расположены считыватели 10.
Указанный снособ реализуется в автоматической линии следующим образом.
Многоместные спутники 2 по транспортной системе 1 перемещаются от станка к станку. На каждой позиции 9 нодачи на станки они опознаются считывателями 10 и те спутники 2, которые находятся на нози- циях 9 подачи с обращенными к считывателям 10 гранями с адресными метками, опознаются считывателями 10 и по их команде загрузочные устройства 7 осуществляют перемещение спутников 2 на приемные позиции станков. После обработки всех деталей.
находящихся на спутниках 2, последние пе- ре.мещаются загрузочными устройствами 7 на позиции 11, причем во время перемещения осуществляя поворот спутников на 180°. Таким образом, повернутые на 180° спутники 2, попадая на позиции 9 подачи вторых станков каждой пары параллельно работающих станков, уже не опознаются считывателями 10 этих позиций 9 и беспрепятственно
Q перемещаются далее по транспортной системе 1. Спутники 2 с деталями, не обработанными на первых станках каждой группы и перемещенные транспортной системой 1, минуя эти станки, опознаются считывателя- .ми 10 и загрузочные устройства 7 вторых
5 станков подают такие спутники на приемные позиции станков для обработки.
Так после обработки деталей на станках 3 спутники 2 с деталями перемещаются на станки 5-6, где адресование спутников осу ществляется аналогичным образом. Причем, поскольку станки 5 и 6 обрабатывают все детали со всех спутников 2, проходящих мимо них, то у последующих за ними групп станков 3 и 4 на позициях подачи считыватели установлены на противоположных сторонах.
5Формула изобретения
Способ автоматического адресования спутников, имеющих форму правильного многогранника в системах автоматического адресования для разветвляющихся тран„ спортных несинхронных систем, заключающийся в том, что на спутниках размещают адресные метки, при этом у каждого из спутников, подходящего к разветвлению трассы транспортной системы, считывателем для онределения его дальнейщего дви5 жения считывают адресную метку, причем в случае необходимости изменения адресной метки спутника производят переадресование спутника, отличающийся тем, что, с целью упрощения, адресную метку размещают на одной из граней каждого спутника, считывателями определяют адрес спутника по наличию или отсутствию адресной метки на обращенных к ним гранях спутников, а переадресование осуществляют поворотом спутника в горизонтальной плоскости на угол, кратный углу между гранями.
0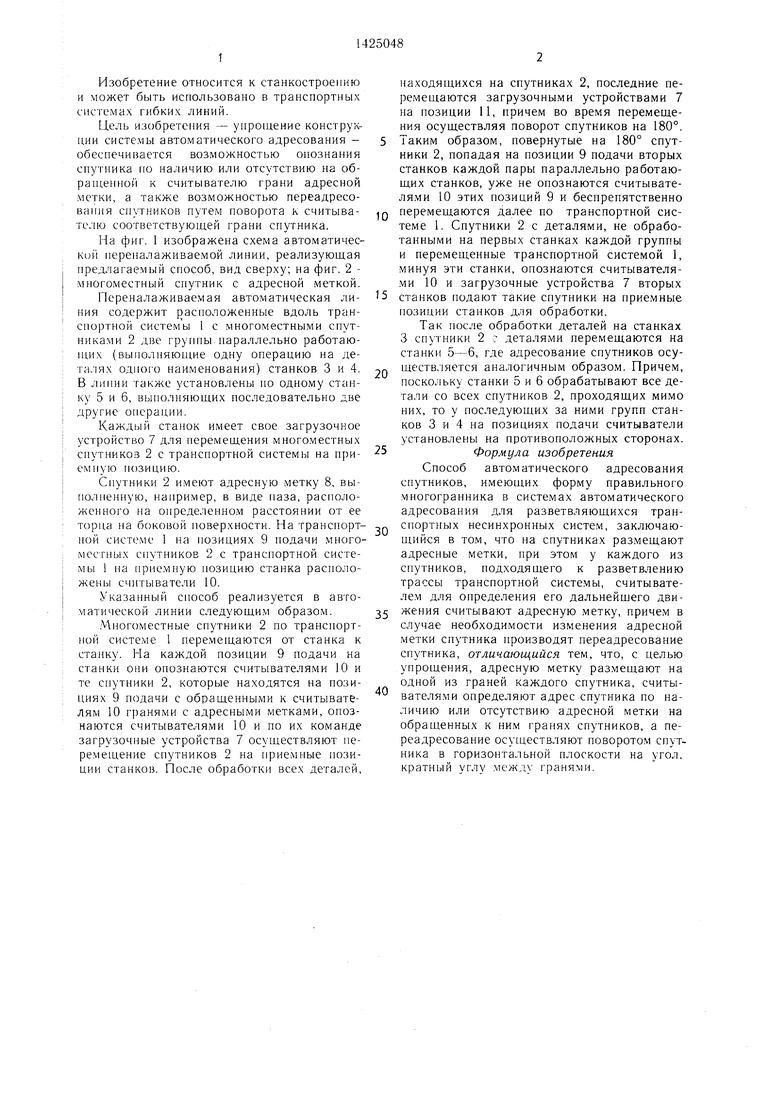
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
| Способ сборки изделий | 1985 |
|
SU1298034A1 |
| Гибкая автоматическая линия | 1989 |
|
SU1662808A1 |
| СПОСОБ БАЗИРОВАНИЯ И КРЕПЛЕНИЯ СПУТНИКА И СТАНОК С ПЛАВАЮЩЕЙ СИСТЕМОЙ БАЗИРОВАНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2157307C2 |
| Сборочная линия | 1983 |
|
SU1121127A1 |
| ПЕРЕНАЛАЖИВАЕМЫЙ АГРЕГАТНЫЙ СТАНОК | 1991 |
|
RU2078674C1 |
| Горизонтально-замкнутый распределительный конвейер | 1979 |
|
SU856941A1 |
| Способ загрузки токарных полуавтоматов деталями для их двусторонней обработки и автоматическая линия для его осуществления | 1988 |
|
SU1662807A1 |
| Автоматическая линия | 1986 |
|
SU1425050A1 |
| Система автоматического адресования в процессе сортировки | 1988 |
|
SU1533772A1 |
Изобретение относится к станкостроению и может быть использовано в транспортных системах гибких линий. Цель изобретения - упрощение конструкции систем автоматического адресования - обеспечивается возможностью опознания спутника 2 на позициях 9 подач спутников в соответствующие станки 3-6 по наличию или отсутствию на обращенной к считывателям 10 грани адресной метки, а также возможности переадресования спутников 2 путем их поворота например на 180° загрузочными устройствами 7 станков 3-6. 2 ил.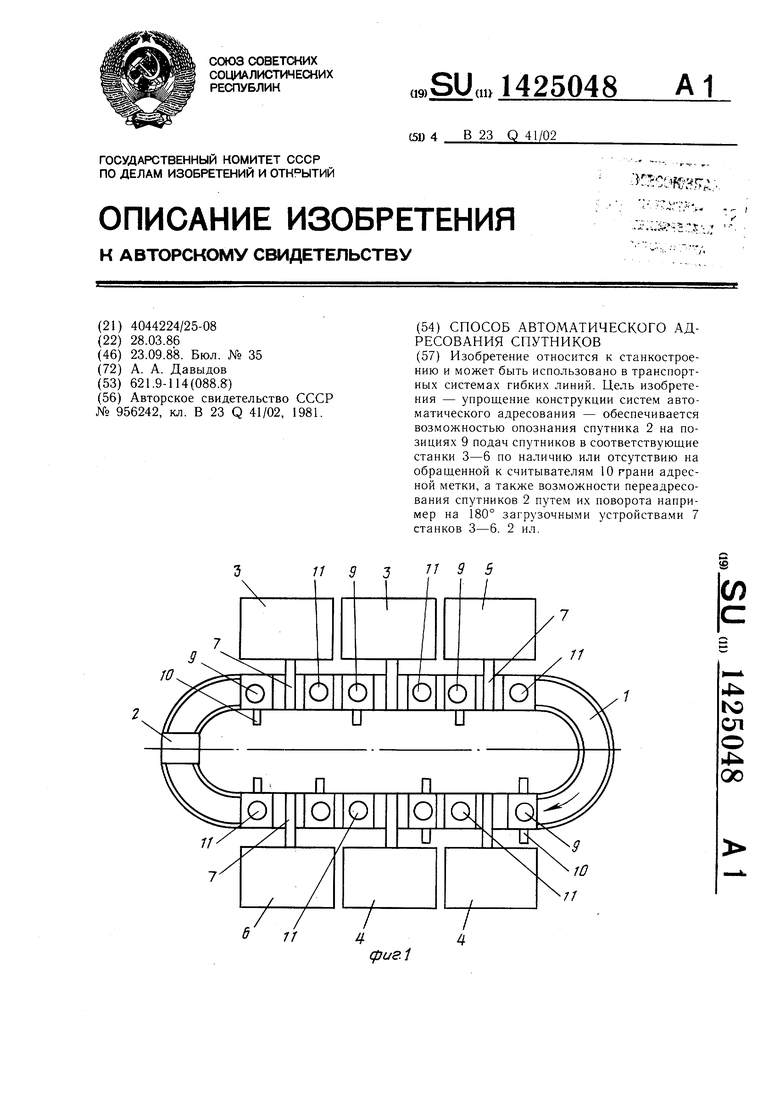
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
