Изобретение относится к сортировке, в частности к управлению конвейерами с автоматическим адресованием.
Цель изобретения - повышение надежности сортировки.
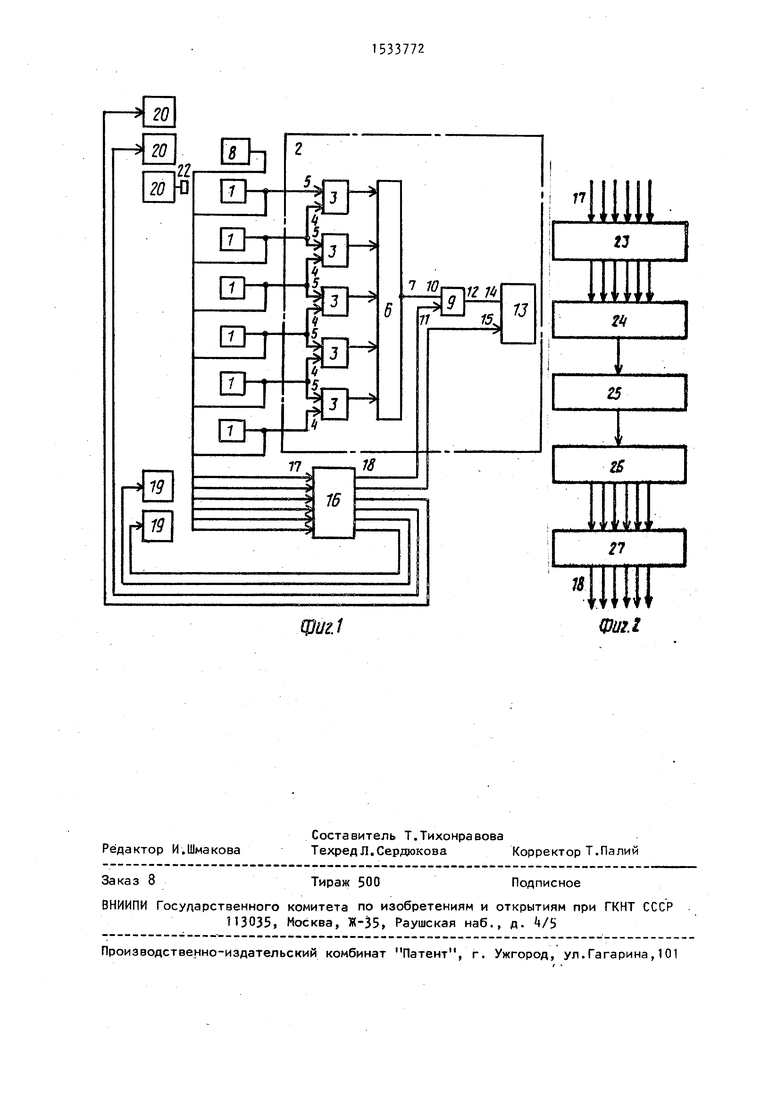
На фиг. 1 представлена функциональная схема системы; на фиг. 2 - функциональная схема блока управления ,
Система содержит п датчиков 1, расположенных вдоль адресной позиции 2, (п-1) RS-триггеров З с R-входами k и S-входами 5, (п-1)-входовую схему ИЛИ-НЕ 6 с выходом 7, задатчик 8 адреса, схему И 9 с входами 10 и 11. и выходом 12, загрузочно-разгрузочный узел 13 с входом разгрузки и входом 15 загрузки; блок 16 Формирования управляющего сигнала с входами 1 7 и выходами 18, управляемые упоры 19 и 20 и объект 2) адресования с элементом 22 воздействия на датчики 1 .
1 Блок управления содержит узел 23 оптронной развязки; мультиплексор 2, узел 25 обработки информации, демуль- типлексор 26 и выходные усилители 27 с оптронной развязкой.
S-вход 5 любого m-го триггера 3 соединен с выходом ти-г о датчика 1 , а R-вход k каждого m-го триггера 3 соединен с выходом (т-Н)-го датчика 1, где m в 1, 2, ..., п-1, входы 1/ блоL
CJ
СО
со J
3
ка 16 управления соединены с датчиками 1.и эадатчиком 8, а выходы 18 блока 16 управления соединены с управляемыми упорами 19 и 20, с выходом
15загрузки загрузочно-разгрузочного устройства 13f а также с входом 11 схемы И9, выход 12 которой соединен
с входом Ц разгрузки загрузочно-разгрузочного устройства 13, а второй вход 10 схемы И9 соединен с выходом 7 схемы ИЛИ-НЕ 6.
Датчики 1 (на фиг. 1 показано шест датчиков) расположены вдоль адресной позиции с шагом, меньшим минимальной протяженности одного объекта адресования вдоль трассы транспортирования. Наибольшая величина шага определяется разрешающей способностью датчиков, установленных в системе. Например, при использовании герконовых датчиков наибольший шаг целесообразно принять на 2-5 мм меньше минимальной протяженности объекта, применение лазерных датчиков позволяет величину шага для того же объекта транспортирования увеличить до размера на 0,01 - 0,05 мм меньше минимальной протяженности объекта адресования.
Входы узла 23 оптронной развязки являются входами блока управления, выходы узла 23 оптронной развязки сое динены с входами мультиплексора 2k, выход которого - с входом узла 25 обработки информации. Выход последнего соединен с входом демультиплексора 26, выходы которого соединены с входами усилителей 27 с оптронной развязкой .
Система автоматического адресования работает следующим образом.
В процессе движения объекта 21 адресования по заданной трассе, например по конвейеру вдоль адресной позиции 2, элемент 22 воздействует на датчики 1 и задатчик 8, соединенные с входами 17 блока 16 управления. С задатчика 8 на входы 17 блока 16 управления поступает комбинация электрических сигналов, определяемая адресом следования объекта адресования. Блок
16управления по заданной программе сравнивает адрес, поступивший с задатчика 8, с заданным и, в случае их совпадения, возбуждает выходы, к которым подключены электроуправляемые пневмораспределители, обеспечивающие подъем управляемых упоров 19. Последние поднимаются, обеспечивая фик0
5
0
5
0
5
0
5
0
5
са цию объекта 21 адресования в нужном положении по отношению к загру- зочно-разгрузочному устройству 13. Затем блок 16 управления возбуждает выход, к которому подключен вход 15 загрузки загрузочно-разгрузочного устройства 13, запуская его. Загру- зочно-разгруэочное устройство 13 выполняет загрузку адресной позиции 2, перемещая на нее зафиксированный управляемыми упорами 19 объект 21 адресования .
Сигналы от датчиков 1, подключенных также к входам 17 блока 16 управления, логически им обрабатываются. По этим сигналам блок 16 управления определяет время начала и окончания сравнения адреса, поступающего из задатчика 8, с заданным, момент выработки сигналов включения упоров 19 для надежной фиксации ими объекта 21 адресования, момент достижения правильного положения объекта адресования по отношению к загруэочно-разгру- зочному устройству 13 и т.д.
При необходимости выполнения опеоэ- ции разгрузки адресной позиции 2 (определяется по отношению к данной .системе автоматического адресования датчика или выключателя, по временному признаку или любым другим способом) блок 16 возбуждает выходы 18, к которым подключены пневмораспределители, управляющие упорами 20, и выход 18, соединенный с входом 11 схемы 9.
В случае, если зона данной адресной позиции 2 на трассе свободна, т.е. может производиться разгрузка адресной позиции без риска столкновения с другими объектами 21 адресования, перемещаемыми вдоль данной адресной позиции, на выходе 7 схемы ИЛИ-НЕ 6 и, соответственно, на входе 10 схемы И9 сигнал соответствует единичному логическому уровню, сигнал с входа 11 схемы И9 проходит на ее выход 12 и далее на вход И разгрузки загрузочно-разгрузочного устройства 13. Последнее выполняет операцию разгрузки, перемещая объект 21 адресования, находящийся на адресной позиции 2, на трассу, проходящую вдоль данной адресной позиции, после чего объект 21 адресования продолжает движение к следующей адресной позиции 2. При необходимости объект 21 адре
ь153
сования во время нахождения на адресной позиции 2 может быть переадресован, т.е. признак адреса, по которому должен в дальнейшем следовать объект 21 адресования, может быть изменен.
Каждый объект 21 адресования, перемещаемый по трассе вдоль адресной позиции 2, независимо от адреса, по которому он следует, при подходе к данной адресной позиции 2 посредством элемента 22 воздействует на первый датчик 1. Сигнал с выхода этого датчика 1 поступает на S-вход 5 первого триггера 3, устанавливая на его прямом выходе уровень логической 1, а на выходе 7 схемы ИЛИ-НЕ 6 - уровень логического О, который, поступая на вход 10 схемы И9, запрещает прохождение сигнала с одного из выходов 18 блока 16 на вход И разгрузки загрузочно-разгрузочного узла 13. При дальнейшем перемещении объекта 21 адресования срабатывает второй датчик 1. Сигнал с его выхода устанав- ливает на прямом выходе второго триггера 3 уровень 1, а на прямом выхо
де первого триггера 3 - уровень О. На выходе 7 схемы ИЛИ-НЕ 6 при этом сохраняется уровень О, запрещающий прохождение сигнала на вход 1 разгрузки зягруэочно-разгрузочного узла 13. В процессе дальнейшего перемещени объекта 21 адресования по трассе вдоль адресной позиции уровень логической 1 последовательно устанавливается на прямых выходах третьего, четвертого и пятого триггеров 3, а уровень О - на прямых выходах второго, третьего и четвертого триггеров 3. При этом состояние выхода 7 схемы ИЛИ-НЕ 6 не меняется.
При воздействии элемента 22 перемещаемого объекта 21 адресования на последний, шестой, датчик 1 на прямом выходе пятого триггера 3 устанавливается уровень О1
поскольку на прямых выходах остальных триггеров 3 уровень О был установлен ранее, на выходе 7 схемы ИЛИ-НЕ 6 и на входе 10 схемы И9 устанавливается уровень 1. В результате, сигнал с одного из выходов 18 блока 16 проходит на вход И разгрузки загрузочно-разгрузочного узла 13, который перемещает объект 21 адресования, находящийся на адресной позиции 2, на трассу его дальнейшего перемещения.
0
5
Если к моменту срабатывания шестого датчика 1 к адресной позиции 2 приблизится следующий перемещаемый по трассе объект 21 адресования и вновь сработает первый датчик 1, на прямом выходе первого триггера 3 вновь установится уровень 1, а на выходе 7 схемы ИЛИ-НЕ 6 сохранится уровень О qo повторного срабатывания шестого датчика 1 .
Таким образом, независимо от момента начала выдачи блоком 16 сигнала разгрузки загрузочно-разгрузочный узел 13 запускается по входу 1 разгрузки только после освобождения на трассе движения объектов 21 адресования зоны данной адресной позиции 2, и риск столкновения объектов 21 адресования в процессе разгрузки исключен.
Входные сигналы с выходов датчиков 1 и задатчика 8 в процессе движения объекта 21 адрессования вдоль адресной позиции 2, поступающие на входы 17, проходят через узел 23 оптронной развязки на входы мультиплексора , с выхода которого электрические сигналы, отражающие состояние датчиков 1 и выходов задатчика 8, поступают на 0 входы узла 25 обработки информации, который в зависимости от комбинации и изменения сигналов на входах мультиплексора 2k вырабатывает соответствующую последовательность сигналов на своем выходе и на входе демульти- плексора 26. Эти электрические сигналы усиливаются усилителями 27 с оптронной развязкой и проходят на выходы 18 блока 16 и далее на электро- пневмораспределители, управляющие упорами и загрузочно-разгрузочными устройствами, обеспечивающими требуемое перемещение объекта 21 адресования .
На конвейере вдоль адресных позиций установлены датчики 1, в качестве которых использованы герконы типа КЭМ-2, а на входе каждой адресной позиции - адресоприемники 8, вы- 0 полненные на базе таких же герконов КЭМ-2. На конвейере вдоль адресных позиций установлены также управляемые упоры.
Объектами адресования на линии е являются тары (спутники), заполненные собираемыми на линии изделиями. Проходя по конвейеру мимо герконовых датчиков, объекты адресования воздействуют на них постоянными магнитами,
5
0
5
71
выполняющими также функцию адресоно- сителей.
Все
логические элементы (RS-триг геры 3, элементы ИЛИ-НЕ 6 и И9) выполнены на базе микросхем серии К561 по известным схемам.
Загрузочно-разгрузочные узлы представляют собой поперечные гравитационные (наклонные) конвейеры, пристыкованные к пневматическим подъемным столам, рабочая поверхность которых при верхнем положении стола является продолжением рабочей поверхности рольганга. Столы смонтированы вдоль трассы движения объектов адресования (спутников) в зонах позиций адресования. Перед подъемными столами установлены упоры 20, отсекающие поток объектов 21 адресования, а за подъемными столами по ходу движения объектов 21 адресования - упоры 19, обеспечивающие фиксацию объекта 21 адресования в нужном положении по отношению к загрузочно-разгрузочно- му узлу 13, т.е. над подъемным столом. Узел 13 и упоры 19 и 20 снабжены электроуправляемыми пневмоприводами, в состав которых входят трехлинейные пневмораспределители cv электромагнитным управлением П-РЭ 3/2, 5 и силовые цилиндры. Срабатывание цилиндров обеспечивается включением и выключением пневмораспреде- лителей по сигналам, поступающим от блока 16 управления. При выполнении операции загрузки работа механизмов выполняется в такой последовательности. При движении объекта 21 адресования по конвейеру его адрес считывается задатчиком 8. Информация передается в блок 16, который при достижении объектом 21 адресования (спутником) заданной позиции дает команду на подъем упоров 19, осуществляющих позиционирование спутника. По окончании позиционирования, т.е. после полной остановки спутника, дается команда на подъем стола, который поднимает спутник над лентами транспортера и сдвигает его в поперечном на
8
0
5
правлении, где расположена адресная позиция 2, например приемный горизонтальный накопитель. После окончания - перегрузки спутника происходит опускание стола и упоров 19.
При необходимости выполнения операции разгрузки адресной позиции 2 блок 16 включает управляемые упоры
0 20, отсекающие поток объектов 21
адресования (спутников), и вырабатывает сигнал, обеспечивающий подъем стола до уровня груэонесущей поверхности накопителя. Выдаваемый с адресс ной позиции 2 на трассу транспортной системы спутник перегружается на стол, после чего стол опускается ниже уровня лент конвейера, оставляя спутник на лентах и обеспечивая дальнейшую передачу объекта 21 адресования к следующей по технологическому процессу адресной позиции 2.
Формула изобретения
Система автоматического адресования р процессе сортировки, содержащая адресные позиции, каждая из которых содержит датчики, установленные с возможностью взаимодействия с чувствительными элементами объектов адресования, и эадатчик адреса, выходами связанные с соответствующими входами блока формирования управляющих сигналов, первые и вторые выходы которого подключены к входам управляемых упоров, а третий выход соединен с первым входом загрузочно-раз- грузочного узла, отличающаяся тем, что, с целью повышения надежности сортировки, каждая адресная позиция дополнительно содержит триггеры, схему ИЛИ-НЕ и схему И, причем выходы датчиков дополнительно связаны с входами соответствующих триггеров, выходами связанных с входами схемы ИЛИ-НЕ, выходом связанной с первым входом схемы И, выход которой подключен к второму входу загру- зочно-разгрузочного узла, причем четвертый рыход блока формирования уп0 равляющего сигнала связан с вторым
входом схемы И.
0
5
0
5
Редактор И.Шмакова
Составитель Т.Тихонравова
Техред Л.Сердюкова Корректор Т.Палий

| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочная линия | 1983 |
|
SU1121127A1 |
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
| Устройство для автоматического адресования грузов подвесных конвейеров | 1981 |
|
SU1020324A1 |
| Устройство для автоматического адресования транспортных средств | 1987 |
|
SU1432560A1 |
| Устройство для управления робототехнологическим комплексом | 1989 |
|
SU1780080A1 |
| Тележечный конвейер | 1979 |
|
SU806557A1 |
| Поточная линия для производства трикотажного полотна | 1981 |
|
SU1306991A1 |
| Распределительный конвейер | 1962 |
|
SU151962A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1539148A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1970 |
|
SU287579A1 |
Изобретение относится к сортировке, в частности к управлению конвейерами с автоматическим адресованием, и позволяет повысить надежность работы системы при неупорядоченном во времени потоке объектов адресования. Устройство содержит датчики, размещенные вдоль адресной позиции, RS-триггеры с R-входами, схему ИЛИ-НЕ с выходом, задатчик адреса, схему И с входами и выходом, загрузочно-разгрузочный узел с входом разгрузки и входом загрузки, блок управления с входами и выходами, управляемые упоры и объекты адресования с элементами воздействия на датчики. Блок управления содержит узел оптронной развязки, мультиплексор, узел обработки информации, демультиплексор и выходные усилители с оптронной развязкой. 2 ил.
Заказ 8
Тираж 500
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. /S
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина,101
Подписное
| СОСТАВ ДЛЯ УДАЛЕНИЯ НАКИПИ | 2013 |
|
RU2515829C1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| ( СИСТЕМА АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ В ПРОЦЕССЕ СОРТИРОВКИ | |||
