1
Изобретение относится к машино- |строению, а именно к Захватам мани- Ьуляторов.
Цель изобретения - повьгшение надежности удержания деталей,схватами с немагнитными лентами и упрощение КОНСТРУКЦИИ,
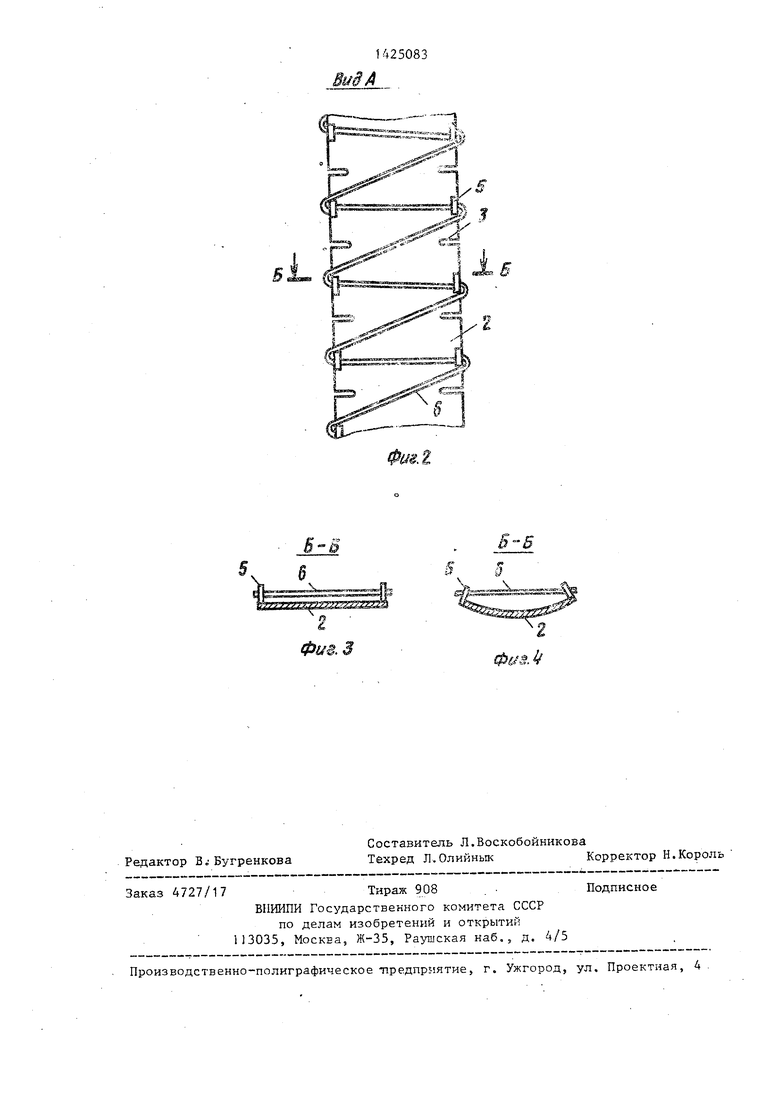
I На фиг. 1 изображен схват, обпшй вид;, на фиг, 2 - вид, А на фиг 1; н {)иг, 3 - разрез на фиг. 2 (в-нерабочем Положении); на фиг, 4 - то ке, при закреплении детали,
Схват манипулятора содержит корпус 1, к которому крепятся концы уп ругой ленты 2, имеющей поперечные прорези 3, Лента в среднем перегибе свободно насажена на шток 4, кинематически связанный с приводом линей него перемещения (не показан). По краям внутренней поверхности ленты эппозитно установлены кольца 5, через которые последовательно пропущена гибкая тяга 6, одним кoнцo s закрленная на крайнем кольце, а другим ;«онцом соединённая с натяжньм меха- яизмом. .Перегибы 7 ленты 2 вьшолняю Ъоль губок схвата.
j Схват работает следующзом образом, I При подъеме штока 4 перегибы 7 Ьблнжаются и обжимают захватываемую еталь, при этом лента 2 деформирует- ря. Затем включается механизы натяже йия гибкой тяги 6, в результате че
го кольца 5 сближаются друг с другом, а поперечное сечение упругой ленты 2 изменяется с плоского на выпуклое. Поперечные прорези -3 способствуют изгибу ленты 2, а равноудаленное от прорезей 3 положение колец 5 обеспечивает симметричньй изгиб краев ленты 2, При поперечном изгибе продольная жесткость ленты повьшается5 а следовательно, повышается грузо- , подьемность и надежность удержания схва/том деталей. Освобождение детали КЗ губок схвата происходит в обратной последоватепьности.
Формула изобретения
Схват манипулятора, содержащий упругую ленту, концы которой закреплены на корпусе схвата, а середина кинематически связана с приводом линейного перемещенияJ и средство для изменения жесткости ленть, о т- личающийся тем, что, с целью повышения надежности удержания деталей и упрощения конструкции,, средство для изменения жесткости ленты выполнено в ззде оппознтно установленных по внутренней поверхности ленты колец и последовательно пропущенной через них гибкой тяги, один конец которой закреплен на крайнем кольце э а другой соедикгн с натяжным механизмом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1151451A1 |
| МЕХАНИЧЕСКИЙ СХВАТ | 2003 |
|
RU2257996C1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Захват манипулятора | 2018 |
|
RU2686167C1 |
| Схват манипулятора | 1985 |
|
SU1294605A1 |
| Захват промышленного робота | 1981 |
|
SU971648A2 |
| Захват промышленного робота | 1979 |
|
SU844175A2 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН РОБОТА | 2003 |
|
RU2250818C1 |
| Схват робота | 1982 |
|
SU1024271A1 |
Изобретение относится к мапшно- строению, а именно к захватам манипуляторов. Цель изобретения - повышение -надежности удержания деталей схватами с немагнитными лентами и упрощение конструкции. Устройство содержит корпус 1, к которому крепятся концы упругой ленты 2. Лента в среднем прогибе свободно насажена на И шток 4, кинематически связанный с приводом линейного перемещения. По краям внутренней поверхности ленты 2 оппозитно установлены кольца 5, через которые последовательно пропущена гибкая тяга 6, одним концом закрепленная на крайнем кольце, а другим концом соединенная с натяжным механизмом. При подъеме штока 4 перегибы ленты 2 сближаются и обжимают захватываемую деталь. Затем включается механизм натяжения гибкой тяги 6, в результате чего кольца 5 сближаются друг с другом, а поперечное сечение упругой ленты изменяется с плоского на вьшуклое. При поперечном изгибе продольная жесткость ленты 2 повьппа- ется, а следовательно, повышается грузоподъемность и надежность удержания схватом деталей, 4 ил. S Э сд о 00 00
.f.
| Схват манипулятора | 1983 |
|
SU1151451A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
