Изобретение относится к машиностроению, а именно к устройствам для захвата деталей и удержания их в процессе транспортировки или обработки, и может быть использовано для механизации и автоматизации различных технологических процессов.
Цель изобретения - предотвращение самопроизвольного раскрытия губок при падении давления в силовом- цилиндре и предохранении от падения детали в случае ее выскальзывания из губок схвата за счет применения механизма фиксации губок с заслонками.
На чертеже изображена схема устройства.
Устройство включает в себя корпус 1, силовой цилиндр 2, шарнирно- рычажную кинематическую цепь 3 и 4, несущую зажимные губки 5. К каждой из губок 5 жестко прикреплен корпус 6, внутри которого размещены подвижные заслонки 7 и копир 8, жестко соединенный со штоком 9. Заслонка 7 имеет1 прорезь 10 прямоугольной формы внутри которой установлен копир 8. На штоке 9 размещена винтовая пружина 11 и ролик 12, На концах заслонок, ближайших к оси схвата, закреплены замковые выступы 13. Направляющая одного из корпусов 6 имеет выпуклые поверхности, взаимодействующие с заслонкой, а противоположный конец этой заслонки подпружинен сверху относительно корпуса 6 ско- бообразной пружиной 14. Заслонки подпружинены при помощи пружин 15 в направлении, перпендикулярном оси схвата.
Устройство работает следующим . образом.
0
5
0
5 ;
0
5
0
5
При захватывании детали схват подводится к ней в раскрытом состоянии. При этом под действием пружин 11 и сил веса штоков 9, роликов 12 и копиров 8 последние опускаются, вызывая перемещение заслонок 7 к оси схвата При взаимодействии штоков 9 с поверх- ,ностью стола, на котором находится деталь, копиры 8 перемещаются вверх и заслонки 7 вдвигаются в корпус 6 в направлении от оси схвата. Деталь размещается между губками 5. В силовой цилиндр 2 подается энергоноситель, и губки 2 смыкаются, зажимая деталь.
Схват с деталью отводят. Под действием пружин 11 и сил веса .штоков 9, роликов 12 и копиров 8 последние опускаются что в сочетании с действием сил упругости пружин 15 вызывает перемещение заслонок 7 к оси схвата. При этом замковые выступы 13 входят в зацепление и защелкиваются благодаря возможности поворота подпружиненной заслонки 7.
В случае выскальзывания детали вследствие ее деформации и вызванного этим уменьшения сцепления детали с губками 5, деталь будет воспринята заслонкой 7, не имеющей скобообразной пружины 14, и не выпадает из схвата.
В случае внезапного сброса давления в силовом цилиндре 2 раскрытия схвата не произойдет, так как заслонки 7 соединены замковым затвором 13, и губки 5 останутся в сведенном состоянии.
Для освобождения схвата от. детали его подводят к столу для размещения детали. При движении схвата в осевом нялпавлении штоки 9 через ролики 12
516
взаимодействуют с поверхностью стола, При этом вследствие большего- угла . наклона копира 8 подпружиненный ко- нец заслонки 7 приподнимается,заслонка разворачивается и замковые выступы 13 выходят из зацепления. При дальнейшем опускании схвата перемещение копиров 8 приводит к раздвижению заслонок 7 от центра схвата. Давление в силовом цилиндре 2 сбрасывается, и деталь освобождается от усилий зажима . Формула изобретения
Схват манипулятора, содержащий корпус, силовой цилиндр, шарнирно- рычажную кинематическую цепь, несущую зажимные губки, механизм их фиксации, отличающийся тем,
6
что, с целью предотвращения самопроизвольного раскрытия губки в случае снижения давления в силовом цилиндре и предохранения от падения детали
в случае ее выскальзывания из гу- бок механизм фиксации выполнен в виде установленного на каждом захватном рычаге корпуса, имеющего направляющие , в которых расположена подпружиненная заслонка с продольным пазом и замковым выступом на конце, и перпендикулярно ей установлен подпружиненный шток с копиром,расположенным в пазу заслонки, причем одна из заслонок имеет возможность качания относительно корпуса, при этом направляющие этого корпуса имеют криволинейные поверхности, выпуклости которых направлены навстречу одна другой.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Захватное устройство | 1985 |
|
SU1291393A1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Захватное устройство | 1986 |
|
SU1355483A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Устройство для ориентации, базирования и подачи листовой заготовки в рабочую зону пресса | 1991 |
|
SU1784376A1 |
Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов. Целью изобретения является повышение надежности схвата за счет предохранения выпадения детали из губок. Схват 5 включает корпус 1, силовой цилиндр 2, шарнир- но-рычажную кинематическую цепь и зажимные губки 5. На калдом захватном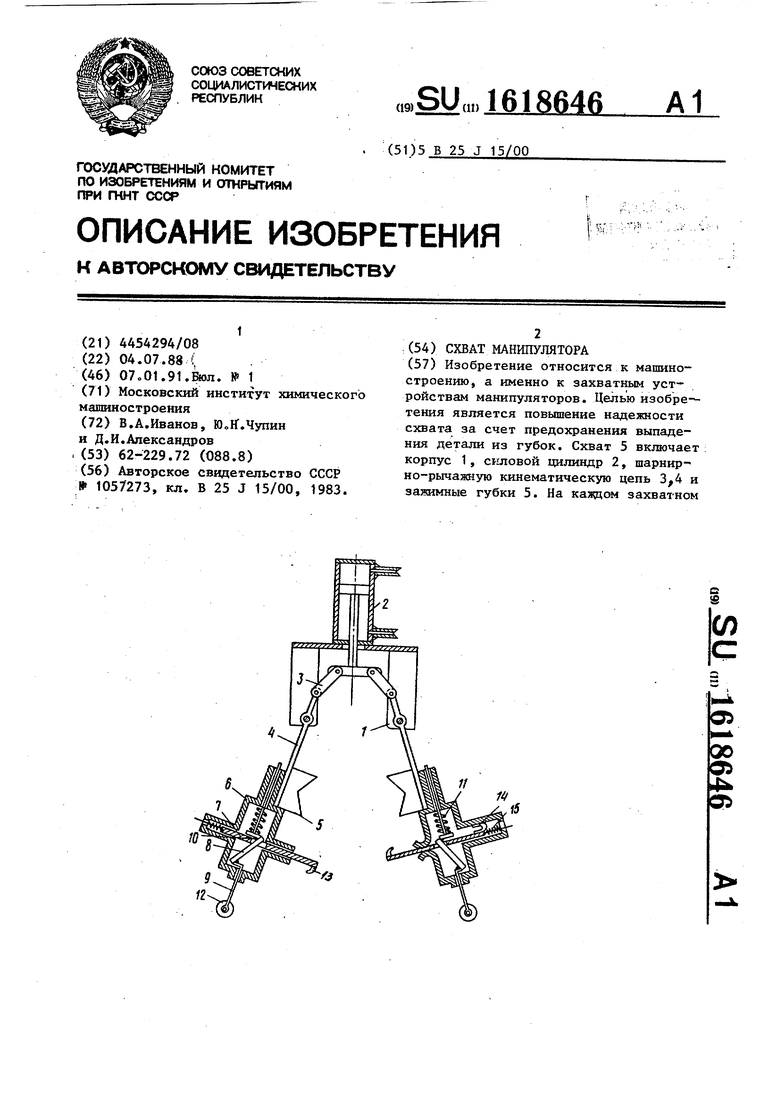
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
