Изобретение относится к обработке металлов давлением, в частности к одно - и многопозиционным автоматам для объемной штамповки изделий массового и крупносерийного производства.
Целью изобретения является снижение металлоемкости и повьш1ение надежности работы.
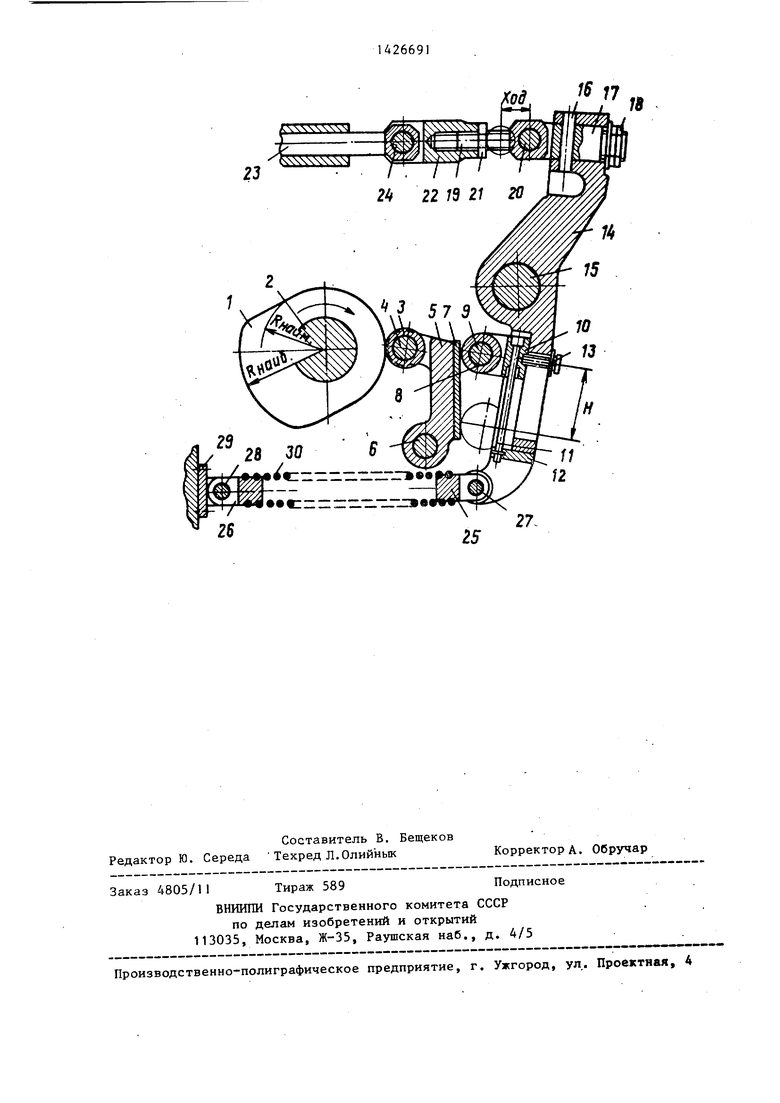
На чертеже схематично представлен предлагаемый механизм.
Механизм состоит из установленного в станине кулачка I, укрепленного на валу 2, ролика 3, установленного посредством оси 4 на одноплечем рычаге 5, закрепленном, в свою очередь, на оси 6, износостойкой планки 7, ролика 8, установленного посредством оси 9 на ползушке Ю. Кроме того, механизм состоит из регулировочного вин- та 11, планки 12, фиксирующего винта 13, двуплечего рычага 14, посаженного /на оси 15, предохранительной шпильки 16, ,оси 17, гаек 18 и винта 19, посаженного на оси 20, фикси- рующей гайки 21, корпуса 22, соединенного шарнирно с толкателем 23 осью 24, серег 25 и 26, посаженных на оси 27 и 28, кронштейна 29 и пружины 30.
Механизм работает следующим образом.
Кулачок 1, закрепленный на вращающемся валу 2, через ролик 3, установленный на оси 4 в одноплечем рычаге 5, приводит его в качательное движение относительно оси 6, размещенной в станине автомата. На рычаге 5 закреплена износостойкая планка 7, приводящая при своем качании во вращательное движение ролик 8, установленный на оси 9 в ползушке 10, которая может изменять свое положение на ве- личину Н в пазу двуплечего рычага 14
с помощью винта 11, установленного в планке 12 рычага 14, и фиксируется в
этом рычаге посредством винта 3 с шайбой. Таким образом, осуществляется привод в качательное движение основного двуплечего рычага 14 относительно неподвижной оси 15, установленной в станине автомата. Верхнее качающееся плечо рычага 14 через предохранительную птильку 16, ось 17, зафиксированную гайками 18, винта 19, оси 20 и гайки 21 приводит в плоскопараллельное движение корпус 22 и в поступательное движение толкатель 23 через ось 24. Нижняя качающаяся часть рычага 1 4 с помощью серьги 25 и 26, за- крепленньк на осях 27 и 28 и кронштейна 29, связана с пружиной 30 растяжения, обеспечивающей постоянньй . контакт ролика 4 с кулачком 1 и износостойкой планки 7 с роликом 8 рычага 4 независимо от положения ролика 8 на рычаге 14. Одновременно пружина 30 обеспечивает возвратное движение толкателя 23 в исходное положение.
Формула изобретения
Механизм выталкивания автоматов для объемной- щтамповки, содержащий установленные на станине вал с кулачками, двуплечий рычаг, смонтированный с возможностью взаимодействия с толкателем и ведомым звеном, отличающийся тем, что, с целью снижения металлоемкости и повьш1е- ния надежности работы, он снабжен осью, закрепленной на станине, ведомое звено выполнено в виде одноплечего рычага, закрепленного на промежуточной оси, двуплечий рычаг снабжен ползушкой, роликом, установленным на ползушке, а также пружиной растяжения, размещенной на его конце, противоположном толкателю.
23
/ff Г7
12
27.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм выталкивания | 1979 |
|
SU776730A1 |
| Механизм переноса заготовок | 1976 |
|
SU664738A1 |
| Устройство для переноса заготовок в многопозиционном высадочном автомате | 1980 |
|
SU958031A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ГВОЗДЕЙ | 1992 |
|
RU2019351C1 |
| Устройство для получения пружин с прямыми концами | 1979 |
|
SU869922A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ИЗ ПРОВОЛОКИ ДЕТАЛЕЙ ТИПА ШТЫРЕЙ | 1971 |
|
SU414034A1 |
| Автомат для холодной штамповки роликов | 1979 |
|
SU940990A1 |
| Механизм отрезки заготовок | 1977 |
|
SU774751A1 |
| ПРЕСС-АВТОМАТ ДЛЯ ДВУСТОРОННЕГО \ ХОЛОДНОГО ВЫДАВЛИВАНИЯВПТБ[^ ^^.'." 'з T't Г Г" Т f " .•' ''' '.'.. •;' iT' (^ 5 * | 1971 |
|
SU424647A1 |
| Шагозадающее устройство к пружинонавивочному автомату | 1985 |
|
SU1301538A1 |
Изобретение относится к области обработки металлов давлением, в частности к механизмам выталкивания при объемной штамповке. Цель изобретения - снижение металлоемкости и повышение надежности. При вращении кулачкового вала кулачок через ролик сообщает качательное движение одноплечему рычагу, закрепленному на оси станины. Одноплечий рычаг через планку воздействует на ролик ползушки двуплечего рычага, сообщая ему качательное движение , которое рычаг передает на толкатель. 1 ил.
| МЕХАНИЗМ ВЫТАЛКИВАНИЯ ПРЕССОВ АВТОМАТОВ | 0 |
|
SU273642A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
