18
rso
О5
vj
05 ел
.5
Фиг.
: 1 ;к)бретение относится к приборострое- iht;o и может быть использовано в производстве магнитных головок.
Целью изобретения является расширение технологических возможностей устройства за счет обеспечения активного контроля качества обработки путем измерения импеданса обрабатываемой головки и регулирования по результату измерения скорости обработки.
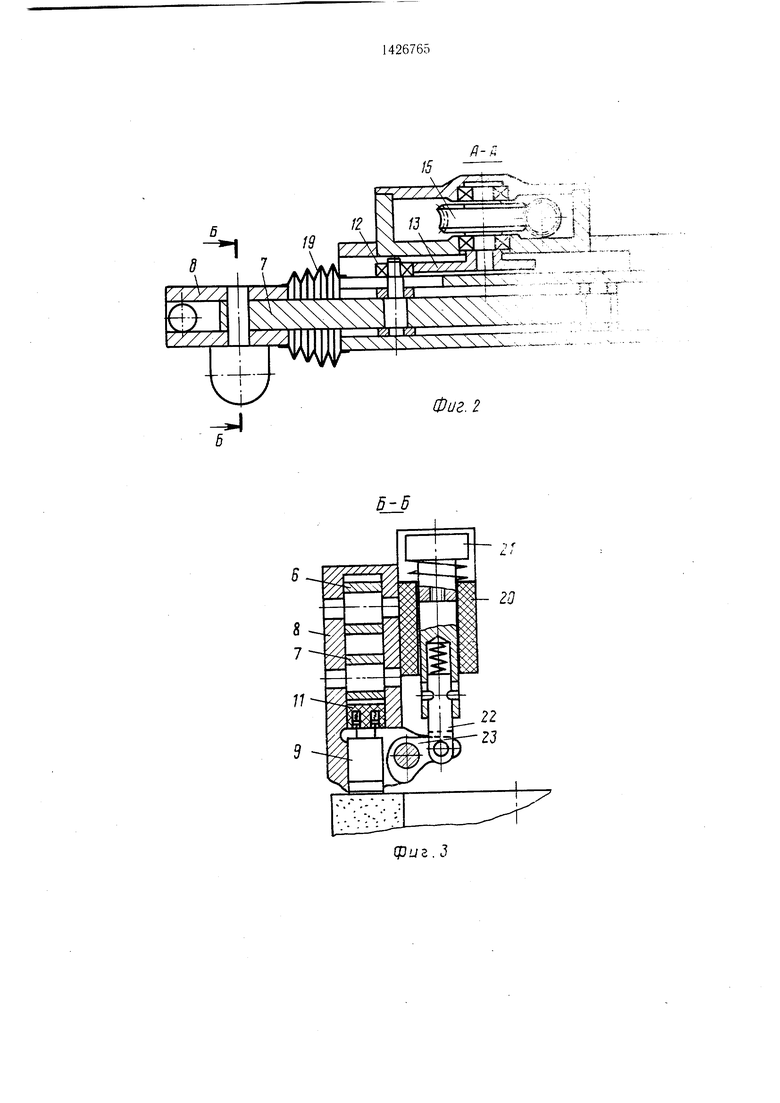
На фиг. 1 показана конструкция устрой- {ства; на фиг. 2 - разрез А-А на фиг. 1; |на фиг. 3 - разрез Б-Б на фиг. 2; на :фит. 4 - электрическая схема устройства. : Устройство для обработки рабочей повер.х- постп магнитной го-ловки состоит из корпуса 1, в котором установлены оси 2 и 3 : коромысел 4 и 5, которые HjapuHpno счо- дпнены с шатунами 6 и 7. Прпспособло- ; ние 8 для установки магшггпой головки :9 я.;1яется одновременно коро.мыс. юм uia)- 1 нирного наралле.лограмма, состоя1л.его также из коромыс.ла 4 и шатунов б и 7. Коромысла 4, 5, установлеш1ые посред- ciiio : осей 2, 3 в корнусе 1, и шатун 7 oGjia iyioT второй пшрнирпый паралле.ю- грамм. Коромысло 4 и нштун 7 являются ooHuiMH для обоих шарнирных па- ра.-|.1слограммов. Магнитная головка 9 крепится 11од 1ружиненным рычагом 10 и подключается к клеммнику 11.
На оси коромысла 4 устаповлен ролик 12, взаимодействующий с кулачком 13. Пружина 14 служит для замыкания ролика 12 па кулачок 13. Кулачок 13 закреплен на валу червячного колеса 15, находя- ш.егося в зацеплении с червяком 16. связанным с нриводным электродвигателем 17, имеюплим тахогеиератор 18. Приспособление 8 и корпус 1 связаны также защитным устройством 19 от нонадания СОЖ, используемой при обработке (щли- фовании, суперфинишировании).
Для обеспечения надежного базирования магнитной головки 9 при обработке приспособление 8 имеет дополнительное зажимное устройство, состоящее из электромагнитной катушки 20, ферромагнитного сердечника 21, упругосвязанного с тягой 22 зажимного рычага 23.
Электродвигатель 17 с тахогенератором 18 вместе с усилителем 24 и схемой 25 сравнения образуют замкнутую электрическую схему автоматического регулирования скорости электродвигателя 17, которая управляется выходным сигналом импедансомет- ра 26, состоящего из геператора 27, настроечного резистора 28, выпрямителя 29 и усилителя 30.
Устройство работает следующим образом. Обрабатываемая магнитная головка 9 устанавливается в приспособление 8, где она подключается к импеденсометру. В процессе
обработки сигнал с имнедансометра определяет скорость вращения электродвигателя 17. В .результате взаимодействия ролика 12 с кулачком 13 приспособление 8 с обрабатываемой магнитной головкой 9 совершает качательное движение вокруг условной оси цилиндрической части рабочей поверхности головки. Подъем профиля кулачка 13 определяет угол качания, а ско рость качательного движения определяется формой профиля кулачка 13, которая проектируется исходя из требуемого закона изменения скорости.
По мере обработки рабочей поверх нос- - ти ма1 нитной голоки 9 ее импеданс уменьшается. Соответственно изменяется и скорость вращения электродвигателя 17, что споco6cTiiyeT снижению 1пероховатости обработанной поверхности.
Формула изобретения
1.Устройство для обработки рабочей поверхности магнитной, головки, содержащее корпус, в котором расположен механизм качания с приспособлением для ус,- тановки магнитной головки, а также включенный в электрическую схему приводной электродвигатель, отличаюш,ееся тем, что, с целью расширения технологических возможностей за счет обеспечения активного контроля качества обработки, оно снабжено расположенным в корпусе кулачковым механизмом, ролик которого связан
с механизмом качания, а кулачок - с приводным . электродвигателем, клеммником, закрепленным на приспособлении для установки магнитной головки, и импедансомет- ром, вход которого подключен к клеммнику, при этом приводной электродвигатель
снабжен тахогенератором, а электрическая схема выполнена в виде схемы сравнения, один вход которой соединен с импедан- сометром, а другой - с тахогенератором, а выход через усилитель подключен к приводному электродвигателю.
2.Устройство по н. 1, отличающееся тем, что механизм качания выполнен в виде двух щарнирных параллелограммов с общим коромыслом и шатуном, причем на коромысле одного из н.их расположен ролик кулачкового механизма, а на коромысле другого - приспособление для установки магнитной головки.
15
fi-.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ шлифования криволинейных поверхностей | 1976 |
|
SU732126A1 |
| Копировально-шлифовальный станок | 1986 |
|
SU1328175A1 |
| Летучие ножницы | 1975 |
|
SU541598A1 |
| Ленточно-шлифовальный станок для обработки лопаток | 1977 |
|
SU931403A2 |
| СТАНОК ДЛЯ ГИБКИ ИЗДЕЛИЙПРОКАТА | 1971 |
|
SU320326A1 |
| Устройство для доводки деталей | 1982 |
|
SU1085788A1 |
| УСТРОЙСТВО для ОБРАБОТКИ ОПТИЧЕСКИХ ДЕТАЛЕЙ С АСФЕРИЧЕСКИМИ ПОВЕРХНОСТЯМИ | 1969 |
|
SU239071A1 |
| ЛЕНТОЧНО-ШЛИФОВАЛЬНЬГЙ СТАНОК | 1967 |
|
SU204175A1 |
| Летучие ножницы | 1977 |
|
SU742054A1 |
| Роторно-конвейерная машина для термической обработки изделий | 1989 |
|
SU1669820A1 |

Изобретение относится к ирибосюстрое- нию. Целью является расширение техно. ю- гических возможностей устройства за счет обеспечения активного контроля качеетип обработки путем измерения имнелаш ;: обрабатываемой головки и регулирован ; CKU рости обработки. Устройство состоит ;: ; пуса 1, в котором посредством д. r,i;i- имосвязанных шарнирных парал.кмогрим- мов, образующих механизм качания, установлена магнитная головка 9. Головка подключена к импедансометру, связанному с приводным электродвигателем, скорость Bpanie- ния которого зависит от величины измеряемого импеданса головки. Приводной электродвигатель 17 посредством кулачка 13 приводит в движение механизм качания с головкой 9. 1 з.п. ф-лы, 4 ил. i (Л с
S,-Фиг. 2
фиг. 3
Сриг.
| Патент США № 4536992, кл | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Устройство для доводки деталей | 1982 |
|
SU1085788A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
