2 3
.
ю
О5
00
-Л }г
. 2(Г. /
Изобретение относится к машиностроению, в частности, к промышленным роботам для переноса и ориентации изделий.
Цель изобретения - Ч:нижение энергозатрат на ориентацию схвата за счет уменьшения количества перемещаемых звеньев при обеспечении неподвижного положения в пространстве одной из геометрических точек схвата.
На фиг,1 показано устройство, общий вид; на фиг.2 - вид А на фиг,1.
Устройство состоит из начального звена I с закрепленным на нем двига- телем 2 и криволинейной направляющей 3, размещенной в пазу промежуточного звена 4, На этом звене закреплен зубчатый сектор 5, входящий в зацепление с зубчатым колесом 6, закрепленным на валу двигателя 2.
На звене 4 перпендикулярно указанному пазу выполнен второй криволиней- ньй паз, в котором размещена направляющая 7, закрепленная на звене 8, При этом центры кривизны двух пазов совпадают в точке М, На звене 4 закреплен зубчатый сектор 9, находящийся в зацеплении с зубчатым колесом
10,закрепленным на валу двигателя i
11,установленного на звене 8, которое с конечным звеном 12 составляют вращательную кинематичечкую пару. Ось последней также проходит через точку М.
На звене 12 установлено цилиндрическое зубчатое колесо 13, находящееся в зацеплении с зубчатым колесом
14,закрепленным на валу двигателя
15,установленного на звене 8. На конечном звене 12 установлен схват 16
с губками 17, которые при захвате объектов циливдрической формы центрируют их таким образом, чтобы их оси проходили через точку М.
Устройство работает следующим образом.
С помощью параллельных губок 17 изделие захватьюается таким образом, чтобы его заданная точка совпадала с точкой М.
При ориентировании изделия по yj- лу производится включение двигателя 11. При этом колесо 10 взаимодействует с зубчатым сектором 9 и перемещает звено 8 относительно звена 4 по направляющей 7.
Поворот изделия на угол У относительно оси производится включением двигателя 2. При этом зубчатое колесо 6 взаимодействует с зубчатым сектором 5 и перемещает звено 4 относительно зв.ена 1 по направляющей 3. Поворот схвата 16 с изделием на угол з осуществляется включением двигателя 15, который вращает звено 12 через зубчатые колеса 13 и 14.
Формула изобретения
Кисть манипулятора, содержащая последовательно расположенные и подвижно соединенные между собой начальное, два промежутоных и конечное звенья, причем на конечном звеНе размещен схват, и приводы, о т л и - ча.ющаяся тем, что, с целью снижения энергозатрат на ориентацию схвата за счет уменьшения количества перемещаемых звеньев-при обеспечении неподвижного положения в пространстве одной из геометрических точек схвата, начальное звено с первым промежуточным, а также оба промежуточ- ньк звена пежду собой соединены с помощью двух дополнительно введенных и расположенных во взаимно перпендикулярных плоскостях криволинейных направля оии1Х, имеющих общий центр кривизны.
Вид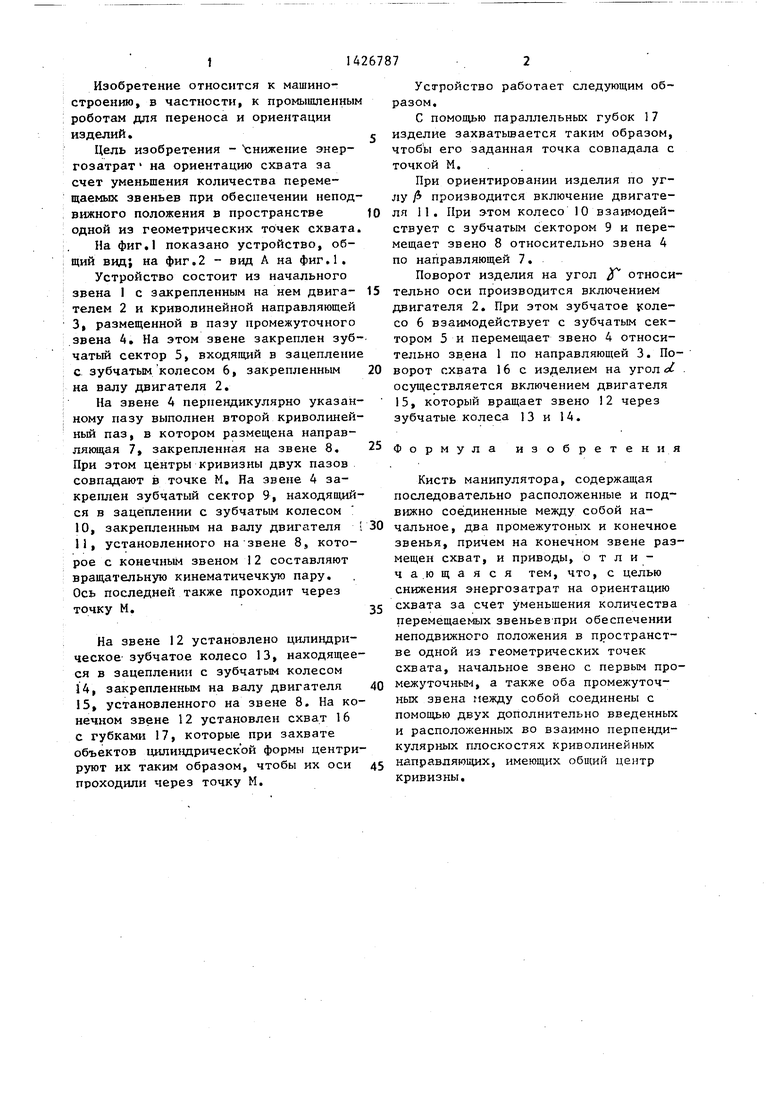
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2313478C1 |
| Устройство для пакетирования штучных изделий | 1987 |
|
SU1654179A1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| Способ автоматической подачи заготовок в технологическое оборудование и устройство для его осуществления | 1984 |
|
SU1301690A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Устройство для съема с отделочных форм и укладки носочных изделий | 1989 |
|
SU1726605A1 |
| Захватное устройство | 1987 |
|
SU1530437A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Устройство для копировальной обработки | 1984 |
|
SU1227424A1 |

Изобретение относится к машиностроению, в частности к промышленным роботам для переноса и ориентации изделий. Цель изобретения - снижение энергозатрат на ориентацию схвата за счет уменьшения количества переме-, щаемых звеньев при обеспечении неподвижного положен11я в пространстве одной из геометрических точек схвата. При включении двигателя 11 через зубчатое колесо О и з-убчатый сектор 9 осуществляется поворот на угол ji звена 8 относительно звена 4. При включении двигателя 2 через зубчатое колесо 6 и соответствующий зубчатый сектор осуществляется поворот звена 4 относительно начального звена 1. При включении двигателя 15 через зубчатые колеса 13, 14 осуществляется поворот схвата 16 с изделием на угол оС . 2 ил, «
| П.Андре, Ж.-М.Кофман, Ф.Лот и Ж-П Тайар | |||
| Конструирование роботов | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
