4 N5
О5 00
оо со
Изобретение относится к транспортному машиностроению и может быть использовано в пневматических системах управления курсовым движением гусеничных машин.
Цель изобретения - повышение удобства управления транспортным средством.
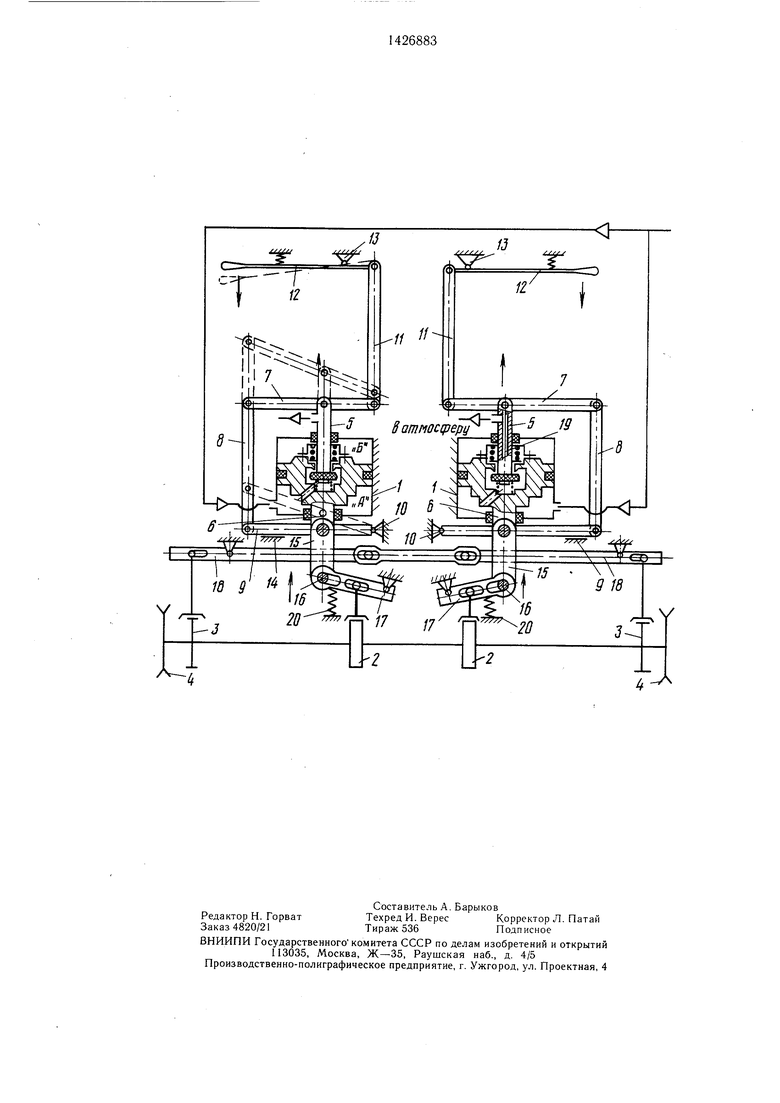
На чертеже представлена кинематическая схема системы управления гусеничной машины.
Система управления состоит из двух
лость «Б с атмосферой.
Часть сжатого воздуха из полости «Б через канал управляюш,его штока выперемеш,ает рычаг 11, воздействующий на систему рычагов 7-9.
Ввиду того, что рычаг 9 опирается на упор 14, при перемещении рычага 11 с рычаг 7, вращаясь в шарнире связи рычагов 7, 8, начинает перемещать управляющий шток .5 вверх (по фигуре). При перемещении управляющего щтока 5 на величину закрытия клапана пневмо- усилителя последний разобщает полости «А
пневмоусилителей 1, муфт 2 планетарных 10 и «Б, и седло управляющего штока 5, тормозов, муфт 3 остановочных тормозов, отрываясь от клапана, сообщает по- ведущих звездочек 4.
Управляющие щтоки 5 пневмоусилителей : соединены с силовыми штоками 6 систе; мой рычагов 7-9, шарнирно связанных меж- , ходит в атмосферу.
; ду собой.Поршень усилителя под воздействием
Система рычагов 7-9 со стороны си- сжатого воздуха .со стороны полости «А
лового штока 6 соединена с неподвижнымперемещается вверх на величину закрытия
шарниром 10, а со стороны управляю- клапана, перемещая в ту же сторону и
: щего штока 5 посредством рычага 11 -силовой шток 6, воздействующий на свя; с рычагами управления 12. Рычаги управ- 20 занный с ним рычаг 9, который, вращаясь
j ления 12 соединены с неподвижным шар-вокруг шарнира 10, перемещает рычаг 8,
ниром 13. Рычаги 9 имеют упор 14.
Силовые штоки 6 кинематически связаны с муфтами 2 и 3 соответственно планетарных тормозов и остановочных тормозов посредством серьги 15, пальца 16, подпружиненных качающихся рычагов 17, управляющих муфтами 2 планетарного тормоза, и ломающихся рычагов 18, управляющих муфтами 3 остановочных тормозов.
Силовая полость «А пневмоусилителя 1 связана с источником давления, а управляющая полость «Б имеет возможность связи с атмосферой через канал 19 управляющего штока 5.
Для обеспечения возврата силового штока 6 в исходное положение последний имеет больщий диаметр по сравнению с управляющим штоком, а рычаги 17 снабжены пружинами 20.
Система управления работает следующим образом.
в свою очередь воздействующий на рычаг 7, который, вращаясь вокруг шарнира связи рычагов 7 и 11, тянет дальше управляющий шток 5 на величину открытия клапана, что в свою очередь вызывает перемещение силового штока, и так до тех пор, пока силовой шток 6 полностью не отпустит муфту планетарного тормоза (т. е. полностью снимает усилие прижатия ведомого
-5Q диска к ведущему), а затем затянет остановочные тормоза.
При этом происходит поворот машины в ту или иную сторону с радиусом поворота, зависящим от времени воздействия на рычаг 12.
зд На фигуре пунктиром показано конечное
и через нормально открытый клапан полость «Б усилителя.
положение системы рычагов.
Формула изобретения Система управления гусеничной машины, содержащая муфты планетарных тормозов и муфты остановочных тормозов каждого
Сжатый воздух от источника давления 40 борта, источник давления, два пневмоуси- поступает в полость «А пневмоусилителя 1лителя, каждый, из которых содержит поршень с силовым штоком, кинематически связанным с муфтами планетарных и остановочных тормозов, размещенный порш- Ввиду разности диаметров управляющего ,с не клапан управления, управляющий шток, 5 и силового 6 штоков усилие со сторо-связанный с одной стороны с клапаном
ны полости «Б больше, поршень усили-управления, а с другой посредством тяг - с
теля перемещается вниз, вместе с ним рычагами управления, отличающаяся тем, перемещается силовой шток 6, который пе- что, .с целью повышения удобства управ- ремещает серьгу 15. При этом палец 16 ления, каждый из пневмоусилителей снаб- воздействует на рычаг 17, который затяги- 50 жен кинематической связью между управ- вает муфты 2 планетарных тормозов. Од- ляющим и силовым штоками, содержащей новременно при перемещении силового штока вниз рычаг 9, связанный с ним, вращаясь вокруг шарнира 10, перемещается до упора 14. При этом остановочные тормоза отпущены. При необходимости пово- 55 с первым концом второго рычага, второй рота в левую или правую,, сторону водитель конец которого щарнирно связан с тягой воздействует на соответствующий рычаг 12, который, вращаясь вокруг щарнира 13,
тягу и два рычага, первый из которых первым концом, связан шарнирно с корпусом, средней частью - с силовым штоком, а вторым концом - с тягой, связанной
управления, а средняя часть - с управляющим штоком пневмоусилителя.
лость «Б с атмосферой.
Часть сжатого воздуха из полости «Б через канал управляюш,его штока выи «Б, и седло управляющего штока 5, отрываясь от клапана, сообщает по-
ходит в атмосферу.
вокруг шарнира 10, перемещает рычаг 8,
в свою очередь воздействующий на рычаг 7, который, вращаясь вокруг шарнира связи рычагов 7 и 11, тянет дальше управляющий шток 5 на величину открытия клапана, что в свою очередь вызывает перемещение силового штока, и так до тех пор, пока силовой шток 6 полностью не отпустит муфту планетарного тормоза (т. е. полностью снимает усилие прижатия ведомого
диска к ведущему), а затем затянет остановочные тормоза.
При этом происходит поворот машины в ту или иную сторону с радиусом поворота, зависящим от времени воздействия на рычаг 12.
На фигуре пунктиром показано конечное
положение системы рычагов.
рычагами управления, отличающаяся тем, что, .с целью повышения удобства управ- ления, каждый из пневмоусилителей снаб- жен кинематической связью между управ- ляющим и силовым штоками, содержащей с первым концом второго рычага, второй конец которого щарнирно связан с тягой
тягу и два рычага, первый из которых первым концом, связан шарнирно с корпусом, средней частью - с силовым штоком, а вторым концом - с тягой, связанной
рычагами управления, отличающаяся тем, что, .с целью повышения удобства управ- ления, каждый из пневмоусилителей снаб- жен кинематической связью между управ- ляющим и силовым штоками, содержащей с первым концом второго рычага, второй конец которого щарнирно связан с тягой
управления, а средняя часть - с управляющим штоком пневмоусилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гусеничного транспортного средства | 1986 |
|
SU1390113A1 |
| Система управления гусеничного транспортного средства | 1985 |
|
SU1258736A1 |
| Механизм управления поворотом гусеничной машины | 1987 |
|
SU1390114A1 |
| Тормозное управление тягача | 1988 |
|
SU1600988A1 |
| Устройство для управления гусеничным транспортным средством | 1986 |
|
SU1556948A1 |
| Устройство для управления двухступенчатым планетарным механизмом поворота гусеничной машины | 1988 |
|
SU1594045A1 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2268839C9 |
| ГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД УПРАВЛЕНИЯ | 1970 |
|
SU260434A1 |
| БОЕВАЯ МАШИНА ДЕСАНТА | 2001 |
|
RU2223460C2 |
| Механизм управления поворотом гусеничного трактора | 1985 |
|
SU1311988A1 |
Изобретение относится к транспортному машиностроению и может быть использовано в пневматических системах управления курсовым движением гусеничных машин. Цель изобретения - повышение удобства управления транспортным средством. Система управления гусеничной машины содержит два пневмоусилителя 1, муфты 2 планетарных тормозов, муфты 3 остановочных тормозов, управляющие штоки 5, кинематически связанные с рычагами управления 12 и клапанами управления, размещенными в поршнях пневмо- усилителей, силовые штоки 6, кинематически связанные с муфтами 2 и 3, систему рычагов 7-9, связывающую штоки 5 управления с силовыми штоками 6. При воздействии на рычаги управления 12 система управления обеспечивает самоперемещение управляющего 5 и силового 6 щтоков на полный ход поршня или на величину, зависящую от времени воздействия на рычаги управления 12. 1 ил. (в
| Система управления гусеничного транспортного средства | 1986 |
|
SU1390113A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
