Известны гидравлические сервоприводы управления преимущественно механизмами поворота и муфтой сцепления гусеничных машин, содержащие соединенный с насосом гидроцилиндр, воздействующий на управляемый механизм, полый Поршень с каналами, размещенный внутри поршня золотник ручного управления и золотник дистанционного управления.
Предлагаемый сервопривод отличается от известных тем, что снабжен подпружиненным клапаном давления, одна сторона которого соединена с нагнетательной магистралью сервопривода, другая - с золотником дистанционного управления. Полый поршень выполнен с радиальными каналами, соединяющими внутреннюю полость поршня со сливной полостью, а золотник ручного управления выполнен с уплотняющим пояском, перекрывающим при дистанционном управлении радиальные каналы полого поршня. Это уменьшает габариты и металлоемкость сеовопривода.
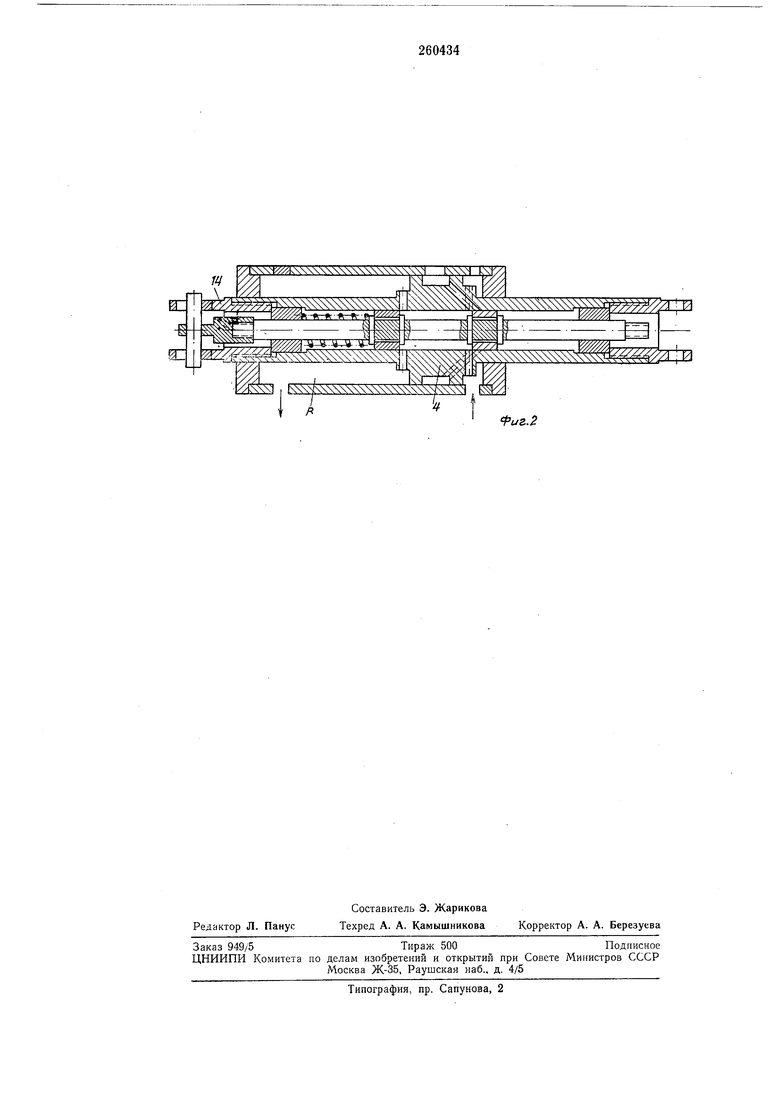
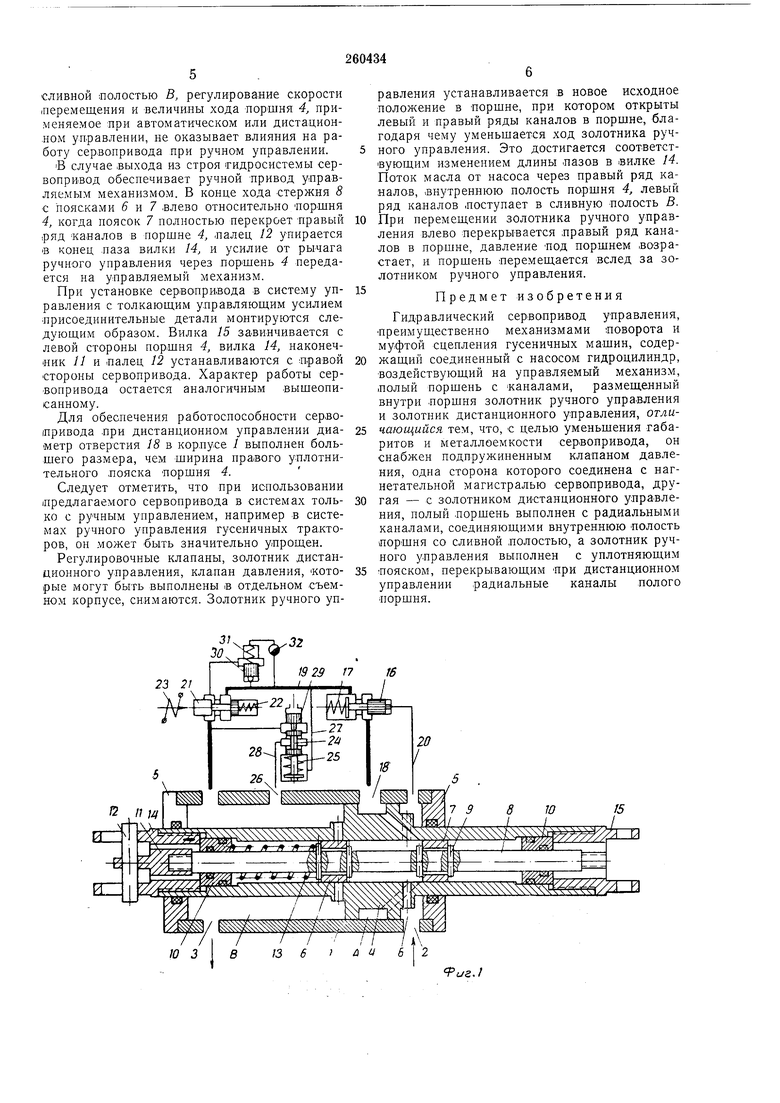
На фиг. 1 схематически изображен гидравлический сервопривод с присоединительными деталями для устаноВКи в систему управления; на фиг. 2 - сервопривод для установки в системы только с ручным управлением.
и выполнен полым с тремя рядами радиальных каналов и штоками одинакового диаметра,.которые уплотняются крышками 5. Золотник ручного управления состоит из двух поясков 5 и 7, которые для упрощения изготовления выполнены раздельно и свободно устанавливаются на стержень 8 и за крепляются штифтами 9. Уплотнительная обойма 10 установлена на стержне 8. На левый конец стержня 8 навинчивается наконечник //, в отверстие которого вставляется палец 12. Под действием пружины 13 стержень 8 и закрепленные на нем пояски 5 и 7 устанавливаются в исходное положение относительно поршня 4, которое
5 определяется упором пальца 12 в конец паза вилки 14. При этом поясок 6 перекрывает левый ряд каналов в поршне 4. К пальцу 12 подсоединяется тяга от рычага ручного управления, к вилке 15 - тяга от управляемого механизма. Клапан 6 давления под действием пружины 17 находится в крайнем правом положении и соединяет кольцевой канал А на поршне 4, отверстие 18 с каналом 19. Полость под клапаном 16 давления каналом 20 соединена с нагнетательной полостью 5. Золотник 21 дистанционного управления под действием пружины 22 занимает крайнее левое положение и соединяет канал 19 со сливной полостью В. Золотник 21 управляется электромагнитом жины 25 находится в крайнем нижнем положении, и его верхний лоясок отсекает отверстие 26 и канал 27 от сливной полости В. Канал 28 соединяет нолость :под клапаном 24 блокировки с Каналом 19. Клапан блокировки имеет также плунжер 29. Клапан 30 расхода ПОД действием пружины 31 находится в нижнем Положении. Сервопривод имеет также регулируемый дроссель 32. В исходном положении поршень 4 устанавливается в корпусе / таким образом, что его кольцевой канал А соединяется с отверстием 18. И, например, лрн установке сервопривода в систему управления гусеничных тракторов длина кольцевого канала А соответствует величине смещения исходного положения, поршпя при износе постоянно замкнутых фрикционных элементов управляемых механизмов. В исходном Положении золотников управления еотОК масла от насоса через отверстие 2 поступает в нагнетательную .полость Б, а далее через правый ряд каналов и внутреннюю .полость поршня 4, средний ряд каналов, кольцевой канал А, отверстие 18, через клапа-н 16 давления, канал 19 идет в Сливную полость В через золотник 21 дистанционного управления. Часть масла из канала 19 идет в сливную полость В через регулируемый дроссель 32 и клапан 30 расхода. Ручное управление сервоприводом осуществляется Следующим образом. При перемещении стержня 8 влево относительно поршня 4 сжимается пружина 13 и вначале поясок 6 открывает левый ряд каналов В поршне 4, тем самым дополнительно соединяя нагнетательную полость Б -со сливной полостью Bj затем поясок 7 Перекрывает средний ряд каналов, прикрывает правый ряд каналов в поршне 4. Возникшее давление масла в нагнетательной полости Б вначале вызывает перемещение влево клапана 16 давления, который закрывает кольцевой канал А и отверстие 18 от канала 19. При дальнейшем прикрытии праВОГО ряда Каналов поЯСком 7 давление масла возрастает настолько, что поршень 4 перемещается влево вслед за пояском 7 золотника ручного управления. При перемещении пояска 7 ВПраво правый ряд каналов в порщне 4 приоткрывается, давление масла в нагнетательной полости Б уменьщается, и порщень 4 под действием пружин управляемого механизма перемещается вправо вслед за пояском 7. При возвращении поршня 4 в исходное положение стержень 8 с поясками 5 и 7 продолжает перемещение вправо. Когда поясок 7 открывает правый ряд каналов, а поясок 6 еще не перекрыл левый ряд каналов в поршне 4, нагнетательная полость Б свободно соединяется со СЛИВНОЙ полостью В. Давление масла в нагнетательной полости Б падает, и клапан 16 давления под действием пружины 17 перемещается вправо, соединяя кольцевой канал А и нагнетательную полость Б со сливной полостью В. Одновременно и независимо от ручного может быть осуществлено дистанционное или автоматическое управление сервОПриводом. При поступлении электрического сигнала с пульта дистанционного управления или от датчика рассогласования при автоматическом волсдении на электромагнит 23 золотник 21 дистанционного управления перемещается в крайнее правое положение и перекрывает поток масла, отсекая нагнетательную полость Б и кольцевой канал А от сливной полости В. Под действием возникшего давления масла поршень 4 перемещается влево. Скорость перемещения .поршня 4 определяется настройКОЙ дросселя 32, который регулирует количество масла, сливаемого из нагнетательной полости Б через клапан 30 расхода, минуя золотник 21 дистанционного управления, в сливную полость в. При прекращении подачи электрического сигнала золотник 21 дистанционного управления и поршень 4 возвращаются в свои исходные положения. При этом детали, размещенные внутри поршня 4, перемещаются вместе с ним. При движении гусеничного трактора с нагрузкой на крюке, например на пахоте на рабочем гоне, для эффективного управления поворотом трактора достаточно выключения Планетарного тормоза (ф.рикциона). При использовании сервопривода для управления и Планетарным (фрикционным) и остановочным тормозами одного борта клапан 24 блокировки предназначен при автоматическом или дистанционном управлении для остановки порщня 4 в Положении, соответствующем только выключению планетарного тормоза (фрикциона). При Перемещении золотника 21 дистанционного управления .вправо возникшее давление масла по каналу 27 подается ПОд клапан 24 блокировки и перемещает его вверх. В результате этого Отверстие 26 и канал 28 соединяются со сливной полостью В. Поршень 4, перемещаясь влево, останавливается у отверстия 26, так как кольцевой канал А и на.гнетательная полость Б соединяются со сливной полостью В. Это положение поршня 4 соответствует выключению Планетарного тормоза (фрикциона). При движении гусеничного трактора без нагрузки на крюке для эффективного поворОта трактора необходима затяжка остановочного тормоза. При дистаНционном или автоматичеСком управлении для осуществления полного хода поршня 4 и затялски остановочного тормоза клапан 24 блокировки удерживается в нижнем Положении либо подачей давления масла в полость над плунжером 29, например, из поршневой полости гидроцилиндра навесной системы, либо механическим воздействием на плунжер 29. Благодаря тому, что кольцевой канал А на поршне 4 при автоматическом или дистанционном управлении соединен с нагнетательной полостью Б, а при ручном управлении отсечен
сливной лолостью в, регулирование скорости перемещения и величины хода поршня 4, применяемое :при автоматическом или дистационлом управлении, не оказывает влияния на работу сервопривода при ручном управлении.
В случае выхода из строя гидросистемы сервопривод обеспечивает ручной привод управляемым механизмом. В конце хода стержня 8 с поясками б и 7 влево относительно лоршня 4, когда поясок 7 полностью перекроет правый ,ряд каналов в поршне 4, .палец, 12 упирается в конец .паза вилки 14, и усилие от рычага ручпого управления через поршень 4 иередается па управляемый механизм.
При установке сервопривода в систему управления с толкающим управляющим усилием присоединительные детали монтируются следующим образом. Вилка 15 завинчивается с левой стороны поршня 4, вилка 14, наконечник 11 fi лалец 12 устанавливаются с правой стороны сервопривода. Характер работы сервопривода остается аналогичным выщеописанному.
Для обеспечения работоспособности сервопривода лри дистанционном управлении диаметр отверстия 18 в корлусе 1 выполнен большего размера, чем ширина правого уллотнительного лояска поршня 4.
Следует отметить, что лри иопользовании предлагаемого сервопривода в системах только с ручным управлением, например в системах ручного управления гусеничных тракторов, он может быть значительно упрощен.
Регулировочные клапаны, золотник дистанционного управления, клапан давления, «оторые могут быть выполнены в отдельном съемном корпусе, снимаются. Золотник ручного уп/2 // W
равления устанавливается в новое исходное положение в лоршне, при котором открыты левый и правый ряды каналов в порщне, благодаря чему уменьшается ход золотника ручного управления. Это достигается соответствующим изменением длины пазов в вилке 14. Поток масла от насоса через правый ряд каналов, внутреннюю полость поршня 4, левый ряд ка.налов поступает в сливную лолость В. При перемещении золотника ручного управления влево перекрывается правый ряд каналов в поршне, давление под поршнем возрастает, и поршень перемещается вслед за золотником ручного управления.
Предмет изобретения
Гидравлический сервопривод управления, преимущественно механизмами поворота и муфтой сцепления гусеничных машин, содержащий соединенный с насосом гидроцилиндр, воздействующий на управляемый механизм, полый поршень с каналами, размещенный внутри поршня золотник ручного управления и золотник дистанционного управления, отличающийся тем, что, с целью уменьшения габаритов и металлоемкости сервопривода, он снабжен подпружиненным клапаном давления, одна сторона которого соединена с нагнетательной магистралью сервопривода, другая - с золотником дистанционного управления, полый поршень выполнен с радиальными каналами, соединяющими внутреннюю полость поршня со сливной полостью, а золотник ручного управления выполнен с уплотняющим пояском, перекрывающим при дистанционном управлении радиальные каналы полого поршня. ЮJ5 ).
fuz.2
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД УПРАВЛЕНИЯ ГУСЕНИЧНЫХ МАШИН | 1966 |
|
SU188311A1 |
| Гидравлический сервопривод | 1988 |
|
SU1546328A1 |
| Гидравлический сервопривод управления гусеничной машины | 1978 |
|
SU747763A1 |
| Механизм управления поворотом гусеничного трактора | 1985 |
|
SU1311988A1 |
| ВСЕСОЮЗН.АЯПАТ^НТУ-^ТЕШ^^^СЯАЯBHb/iHOTtTKA | 1970 |
|
SU284552A1 |
| Гидравлический сервопривод управления гусеничной машины | 1985 |
|
SU1286458A1 |
| Гидравлический сервопривод управления гусеничной машины | 1983 |
|
SU1106718A1 |
| ГИДРОУСИЛИТЕЛЬ | 1965 |
|
SU175829A1 |
| Гидравлический сервопривод управления гусеничной машиной | 1987 |
|
SU1426884A1 |
| Гидравлический следящий привод управления гусеничной машины | 1979 |
|
SU855255A1 |