4 1чЭ
00
to
05
Изобретение относится к сельскохозяйственному машиностроению, а именно к конструкции зерноуборочных комбайнов.
Цель изобретения - снижение потерь зерна за молотилкой за счет выравнива- ния загрузки по ее ширине путем поддержания направления движения продольной оси комбайна по центру распределения хлебной массы по ширине валка.
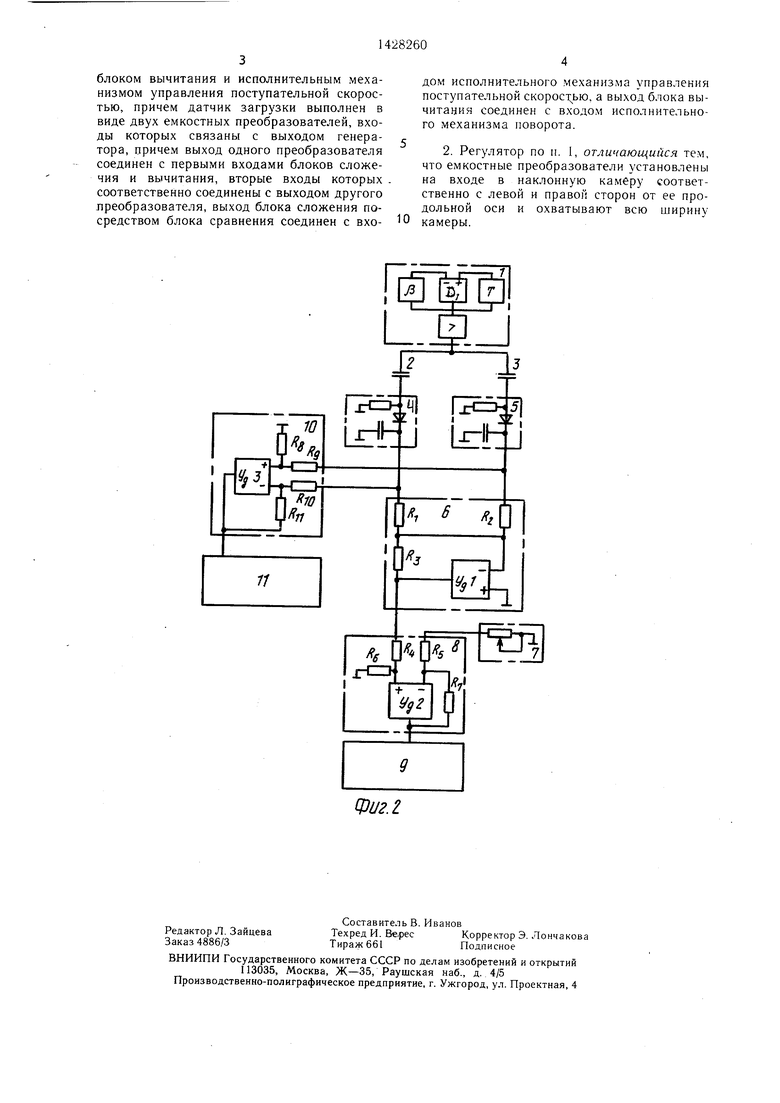
Ца фиг. 1 показана блок-схема регулятора загрузки комбайна; на фиг. 2 - его прип- ципиальная схема.
Регулятор состоит из генератора 1, емкостных преобразователей, включающих емкостные датчики 2 и 3, двух выпрямителей 4 и 5, блока 6 сложения, задатчи- ка 7 загрузки, блока 8 сравнения, испол- нительного механизма 9 управления поступательной скоростью, блока 10 вычитания и исполнительного механизма 11 поворота.
Генератор 1 (фиг. 2) выполняется по стандартной RC-схеме и содержит операцион- ный усилитель DI с цепью положительной обратной связи (мостом Вина) и цепью отрицательной обратной связи и эмиттер- ный повторитель. Элементы обратной связи определяют амплитуду и частоту сигналов генератора, а эмиттерный повторитель предназначен для их усиления по мощности.
Емкостные датчики 2 и 3 выполняются из электродов, располагаемых на диэлектрических основаниях на днище наклонной камеры. В качестве второго электрода исполь- зуются металлические детали комбайна, в частности днище. Переменный ток на выходе датчиков 2 и 3 преобразуется в постоянный выпрямителями 4 и 5.
Блок 6 сложения представляет дифференциальный усилитель с двумя входами и сопротивлениями обратной связи. При этом, если их величины равны, то напряжение на выходе усилителя UBUX Ui + U2, где Ui и U2 - напряжения с блоков 4 и 5 соответственно.
Задатчик 7 загрузки выполняется на ос- нове резистора с регулируемым сопротивлением.
Блок 8 сравнения выполнен, как и блок 6, на основе дифференциального усилителя с двумя входами и сопротивлениями об- ратной связи.
Блок 10 вычитания устроен аналогично блоку 8 сравнения на дифференциальном усилителе.
В качестве исполнительных механизмов управления поступательной скоростью 9 и поворота 11 служат электромагниты, соединенные с соответствующими золотниками гидросистемы комбайна.
Регулятор работает следующим образом.
Генератор 1 подает гармонический сигнал на датчики 2 и 3 емкостного типа. Тог- да на выходе датчика 2, установленного с левой стороны от продольной оси комбайна, действует сигнал, пропорциональный
количеству и свойствам хлебной массы, проходящей по этой стороне, т.е. действует сигнал, пропорциональный загрузке левой стороны молотилки. Аналогично работает датчик 3, установленный с правой стороны от продольной оси комбайна. Сигналы с обоих датчиков 2 и 3 через выпрямители 4 и 5 суммируются блоком 6 сложения, и на его выходе появляется сигнал, пропорциональный общей загрузке молотилки комбайна. Этот сигнал в блоке 8 сравнения сравнивается с сигналом от задатчика 7 загрузки. Если сигнал с .блока 6 сложения больше сигт нала с задатчика 7 загрузки, то с выхода блока 8 сравнения подается сигнал на исполнительный механизм 9 поступательной скорости для уменьшения скорости движения комбайна. Наоборот, если сигнал с блока 6 сложения меньше сигнала с задатчика 7 загрузки, то на исполнительный механизм 9 подается сигнал с блока 8 сравнения на увеличение скорости движения комбайна. Допустимый уровень загрузки устанавливается задатчиком 7 загрузки в зависимости от свойств хлебной массы (прежде всего ее влажности).
С датчиков 2 и 3 через выпрямители 4 и 5 сигналы подаются также на блок 10 вычитания. Если сигнал с датчика 2 больше сигнала с датчика 3, то на выходе блока 10 вычитания появляется, например, положительный сигнал, который подается на исполнительный механизм 1 поворота для поворота комбайна влево, действующий до выравнивания сигналов обоих датчиков 2 и 3. Если сигнал с датчика 2 меньше сигнала с датчика 3, то на выходе блока 10 вычитания действует отрицательный сигнал, подаваемый на исполнительный механизм 11, который срабатывает в этом случае в противоположном направлении, и комбайн поворачивает вправо также до выравнивания сигналов обоих датчиков 2 и 3.
Этим обеспечивается направление движения комбайна по центру распределения хлебной массы по ширине валка.
Таким образом, суммируя и вычитая сигналы двух преобразователей, осуществляют регулирование загрузки молотилки комбайна при изменении распределения количества хлебной массы как по длине, так и по ширине валка.
Формула изобретения
1. Регулятор загрузки комбайна, содержащий датчик загрузки, задатчик загрузки, блок сравнения и исполнительный механизм поворота, отличающийся тем, что, с целью снижения потерь зерна за молотилкой за счет выравнивания загрузки по ее ширине путем поддержания направления движения комбайна по центру распределения хлебной массы по ширине валка, он снабжен генератором, блоком сложения.
блоком вычитания и исполнительным механизмом управления поступательной скоростью, причем датчик загрузки выполнен в виде двух емкостных преобразователей, входы которых связаны с выходом генератора, причем выход одного преобразователя соединен с первыми входами блоков сложения и вычитания, вторые входы которых соответственно соединены с выходом другого лреобразователя, выход блока сложения посредством блока сравнения соединен с вхо
дом исполнительного механизма управления поступательной скорост;ью, а выход блока вычитания соединен с входом исполнительного механизма поворота.
2. Регулятор по п. 1, отличающийся тем, что емкостные преобразователи установлены на входе в наклонную камеру соответственно с левой и правой сторон от ее продольной оси и охватывают всю ширину камеры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования и контроля технологического процесса зерноуборочного комбайна | 1981 |
|
SU959682A1 |
| Система автоматического регулирования и контроля технологического процесса зерноуборочного комбайна | 1984 |
|
SU1175386A2 |
| Устройство для автоматического контроля и управления самоходной уборочной машиной | 1977 |
|
SU701569A1 |
| Устройство для автоматического регулирования загрузки электрофицированного зерноуборочного комбайна | 1983 |
|
SU1160972A1 |
| Устройство контроля технологического процесса сельскохозяйственных машин | 1989 |
|
SU1697613A1 |
| Система автоматического регулирования и контроля технологического процесса зерноуборочного комбайна | 1987 |
|
SU1470226A2 |
| Регулятор загрузки рабочих органов уборочных сельскохозяйственных машин | 1983 |
|
SU1134132A1 |
| Устройство автоматического регулирования загрузки зерноуборочного комбайна | 1987 |
|
SU1507241A1 |
| Устройство для автоматического управления загрузкой самоходной уборочной машины | 1989 |
|
SU1743450A1 |
| Способ автоматического контроля и регулирования подачи массы в комбайн | 1972 |
|
SU484833A1 |
Изобретение относится к сельскохозяйственному машиностроению, а именно к зерноуборочным комбайнам. Целью изобретения является снижение потерь зерна за молотилкой за счет выравнивания загрузки по ее ширине путем поддержания направления движения продольной оси комбайна по центру распределения хлебной массы по ширине валка. При прохождении хлебной массы через датчики 2 и 3 сигналы с последних через выпрямители 4 и 5 поступают «а блоки сложения 6 и вычитания 10. Сигнал с блока сложения 6 сравнивается с сигналом с задатчика загрузки 7, на основании чего блок сравнения 8 вырабатывает сигнал коррекции скорости комбайна. Сигнал с блока вычитания 10, несущий информацию о равномерности загрузки секций комбайна, управляет работой исполнительного механизма поворота 11, производящего коррекцию положения ком байна относительно размещения валка. 1 з.п. ф-лы, 2 ил. g сл
W
rSb-/i| Г1с5н5|
LJE±J ix:F
LTSJ
| Шеповалов В | |||
| Д | |||
| Автоматизация уборочных процессов | |||
| - М.: Колос, 1978, с | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
