Изобретение относится к области погрузочной техники, в частности к области автрматизации погрузочных работ, .Цель изобретения - расширение функциональных возможностей устройства..
На чертеже приведена схема управления погрузкой СЬШУЧИХ 1 руЗОВ в,
транспортные емкости.
Устройство для управления погрузкой сыпучих грузов в транспортные емкости содержит блок управления и бло датчиков. Блок управления содержит кнопку 1 Пуск, первый, второй, третий, четвертый, пятый и шестой триггеры 2 - 7, последний из которых входом установки в 1 подключен к кнопке 1 Пуск, а выходом - к первы входам первого, второго и третьего .элементов И 8 - 10, Второй триггер входом установки в О подключен к выходу первого элемента ИЛИ 11, а второй элемент ИЛИ 12 одним входом соединен с другим входом первого элемента ИЛИ 11, Вход установки в 1 пятого триггера 6 подключен к выходу третьего элемента ИЛИ 13, а вход установки в О четвертого триггера 5 подключен к выходу четвертого элемента ИЛИ 14, Первым входом пятый элемент ИЛИ 15 подключен к кнопке 1 Пуск, вторым входом - к выходу первого элемента И 8, а выходом - к входу установки в 1 второго триггера 3, вход установки в О которого подключен к выходу первого элемента ИЛИ. Шестой элемент ИЛИ 16 подключен одним и другим входами соответственно к выходам, второго и третьего элементов И 9,и 10, вторые входы которых соединены cooTBetcTseHHo с третьим и чет- -вертым входом седьмого элемента ИЛИ 17, выход которого подключен к первому входу третьего элемента ИЛИ 13, второй вход которого соединен с выходом восьмого элемента ИЛИ 18, а второй вход третьего элемента И 10,подключен к выходу девятого элемента ИЛИ 19, Десятый элемент ШШ 20 выходом подключен к входам установки в О третьего и пятого триггеров 4 и 6,.а первым входом - к выходу второго элемента ИЛИ 12. Выход седьмого элемента ИЛИ 17, через элемент 21 задержки подключен к входу установки в 1 третьего TpHrrepia 4, а выход
g
5 9 5 5
0
5
0
5
0
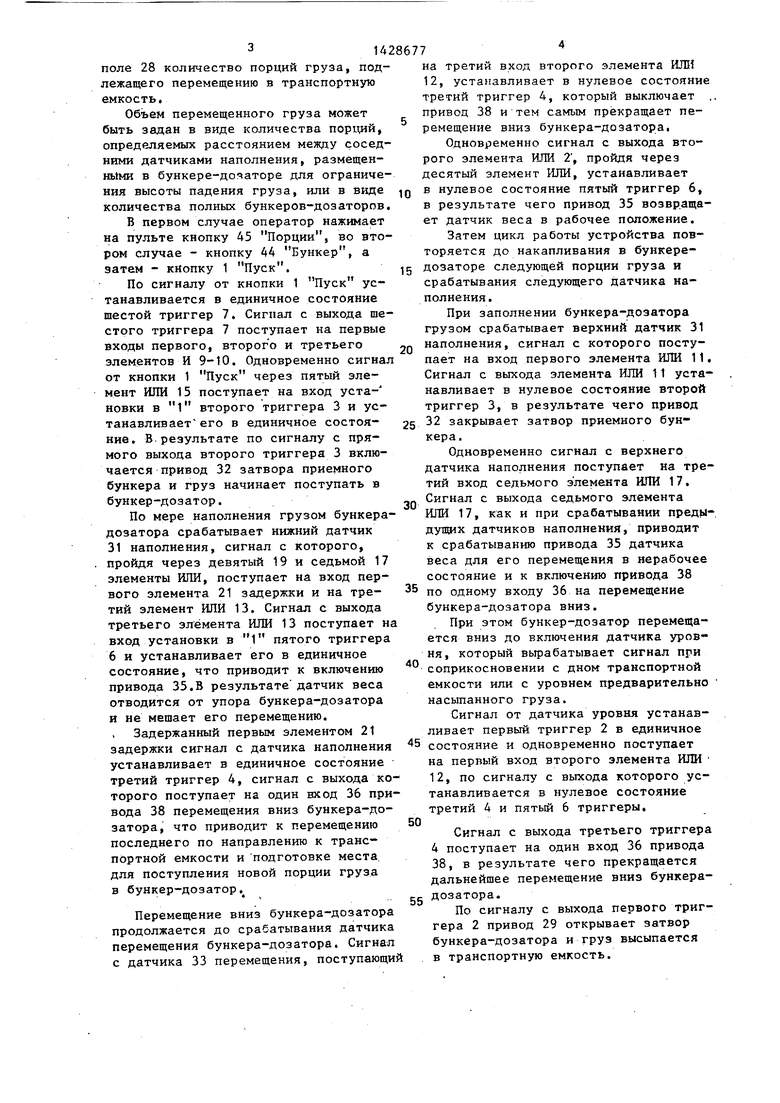
восьмого элемента ИЛИ 18 соединен с входом установки в О первого триггера 2 через второй и третий элементы 22 и 23 задержки, и первым входом - с выходом четвертого элемента,24 задержки. Второй вход первого элемента И 8 подключен к выходу пятого элемента 25 задержки, вход которого соединен с вторым входом десятого элемента ШШ 20. Счетчик 26 выходами подключен к входам дешифратора 27, а первым входом - к выходу наборного поля 28, Привод 29 затвора бункера- дозатора подключен к выходу первого триггера 2, вход установки в 1 которого подключен к датчику 30 уровня. Датчики 31 наполнения подключены 1с входам девятого элемента ИЛИ 19, причем верхний датчик наполнения подключен к первому входу первого эле- мента ИЛИ 11, выход которого соединен с входом установки в О второго триггера 3, выходом соединенный с приводом 32 затвора приемного бункера. Датчик 33 перемещения подключен К третьему входу второго элемента ИЛИ 12, а датчик 34 исходного состояния подключен через десятый элемент ИПИ 20 к входу установки в О пятого триггера 6, выход которого подключен к приводу 35 перемещения датчика веса. Выходы третьего и четвертого триггеров .4 и 5 подключены соответственно к одному и другому входам 36 Вниз и 37 Вверх привода 38 перемещения бункера-дозатора. Датчик 39 веса подключен к измерительному прибору 40. Кнопки Стоп 41, Вниз 42 Вверх 43 подключены соответственно к вторым входам первого элемента ШШ 11, седьмого элемента ИЛИ 17 и восьмого элемента ШШ, кнопки Бункер 44 и Порция 45 подключены соответственно к третьему входу второго элемента И 9 и четвертому входу третьего элемента И 10, выходы которых подключены соответственно к одному и другому входам шестого элемента ИЛИ 16, выход которого подключен к другому входу счетчика 26.
Устройство осуществляет погрузку порциями сыпучих грузов, имеющих ограничение по высоте их падения в процессе погрузки, в автоматическом или полуавтоматическом режимах.
Для погрузки сьтучих грузов в транспортную емкость в автоматическом режиме оператор набирает на наборном
поле 28 количество порций груза, подлежащего перемещению в транспортную емкость.
Объем перемещенного груза может быть задан в виде количества порций, определяемых расстоянием между соседними датчиками наполнения, размещенными в бункере-дочаторе для ограничения высоты падения груза, или в виде количества полных бункеров-дозаторов,
В первом случае оператор нажимает на пульте кнопку А5 Порции, во втором случае - кнопку 44 Бункер, а затем - кнопку 1 Пуск.
По сигналу от кнопки 1 Пуск устанавливается в единичное состояние шестой триггер 7, Сигнал с выхода шестого триггера 7 поступает на первые входы первого, второго и третьего элементов И 9-10. Одновременно сигнал от кнопки 1 Пуск через пятый элемент ИЛИ 15 поступает на вход уста- новки в 1 второго триггера 3 и устанавливает его в единичное состояние, В.результате по сигналу с прямого выхода второго триггера 3 включается привод 32 затвора приемного бункера и груз начинает поступать в бункер-дозатор.
По мере наполнения грузом бункера- дозатора срабатывает нижний датчик 31 наполнения, сигнал с которого, пройдя через девятый 19 и седьмой 17 элементы НИИ, поступает на вход первого элемента 21 задержки и на третий элемент ИЛИ 13. Сигнал с выхода третьего элемента ИЛИ 13 поступает на вход установки в 1 пятого триггера 6 и устанавливает его в единичное состояние, что приводит к включению привода 35,В результате датчик веса отводится от упора бункера-дозатора и не мешает его перемещению.
Задержанный первым элементом 21 задержки сигнал с датчика наполнения устанавливает в единичное состояние третий триггер 4, сигнал с выхода которого поступает на один вход 36 привода 38 перемещения вниз бункера-дозатора, что приводит к перемещению последнего по направлению к транспортной емкости и подготовке места. для поступления новой порции груза в бункер-дозатор,
Перемещение вниз бункера-дозатора продолжается до срабатывания датчика перемещения бункера-дозатора. Сигнал с датчика 33 перемещения, поступающи
5
0
5
на третий вход второго элемента ИЛИ 12, устанавливает в нулевое состояние третий триггер 4, который выключает привод 38 и тем самым прекращает перемещение вниз бункера-дозатора,
Одновременно сигнал с выхода второго элемента ИЛИ 2, пройдя через десятый элемент ИЛИ, устанавливает в нулевое состояние пятый триггер 6, в результате чего привод 35 возвращает датчик веса в рабочее положение.
Затем цикл работы устройства повторяется до накапливания в бункере- дозаторе следующей порции груза и срабатывания следующего датчика наполнения ,
При заполнении бункера-дозатора грузом срабатывает верхний датчик 31 наполнения, сигнал с которого поступает на вход первого элемента ИЛИ 11, Сигнал с выхода элемента ИЛИ 11 устанавливает в нулевое состояние второй триггер 3, в результате чего привод 32 закрывает затвор приемного бункера.
Одновременно сигнал с верхнего датчика наполнения поступает на третий вход седьмого элемента ИПИ 17, Сигнал с выхода седьмого элемента ИЛИ 17, как и при срабатывании предыдущих датчиков наполнения, приводит к срабатыванию привода 35 датчика веса для его перемещения в нерабочее состояние и к включению привода 38 по одному входу 36 на перемещение бункера-дозатора вниз.
При этом бункер-дозатор перемещается вниз до включения датчика уровня, который вырабатывает сигнал при соприкосновении с дном транспортной емкости или с уровнем предварительно насыпанного груза.
Сигнал от датчика уровня устанавливает первый триггер 2 в единичное 5 состояние и одновременно поступает на первый вход второго элемента ИЛИ 12, по сигналу с выхода которого устанавливается в нулевое состояние третий 4 и пятый 6 триггеры.
0
0
Сигнал с выхода третьего триггера 4 поступает на один вход 36 привода 38, в результате чего прекращается дальнейшее перемещение вниз бункера- дозатора.
По сигналу с выхода первого триггера 2 привод 29 открывает затвор бункера-дозатора и груз высыпается в транспортную емкость.
При установке пятого триггера 6 в нулевое состояние датчик веса возвращается в исходное состояние.
После выгрузки груза из бункера-дозач тора в транспортную емкость бункер-дозатор должен возвратиться s исходное
состояние. Для этого сигнал с датчика уровня, задержанный ,на время, определяемое четвертым элементом 24 задерж- ю ь процесс погрузки. ки, поступает на первый вход восьмого Работа схемы управления при нажадозатора и возврата датчика веса в исходное рабочее состояние, поступае на второй вход первого элемента И 8. Однако сигнал на выходе первого элемента И 8 вырабатывается только в случае, когда тестой триггер 7 находится в единичном состоянии, что сви детельствует о необходимости продолтии кнопки 45 Порции не зависит от кратности количества заданных для погрузки порций груза числу порций, g способных поместиться в бункере-доза торе .
элемента ИЛИ 18, а-с его выхода - на вход третьего элемента 23 задержки и на второй вход третьего элемента ИЛИ 13. По сигналу с выхода третьего элемента ИЛИ 13 пятый триггер 6 устанавливается в единичное состояние и привод 35 отводит датчик веса в нерабочее положение.
Длительность задержки сигнала, вносимой четвертым элементом 24 задержки, превышает время полного высыпания груза из бункера-дозатора.
По сигналу с выхода третьего элемента 23 задержки устанавливается в единичное состояние четвертый триггер 5, что приводит к включению по входу 37 привода 38 перемещения вверх бункера-дозатора.
Одновременно сигнал с выхода третьего элемента 23 задержки, задержанный вторым элементом 22 задержки на время, необходимое для предотвращения повреждения груза затвором бункера-дозатора при закрывании, устанавливает в нулевое состояние первый триггер 2, что приводит к включению привода 29 на закрывание затвора бункера-дозатора.
Бункер-дозатор перемещается вверх приводом 38 до тех пор, пока датчик исходного состояния не быработает сигнал, свидетельствующий о возврате бункера-дозатора в исходное состояние .
20
тии кнопки 45 Порции не зависит о кратности количества заданных для погрузки порций груза числу порций g способных поместиться в бункере-доз торе .
Прекращение работы устройства в автоматическом режиме происходит сл дующим образом.
Продолжительность работы устройства зависит от заданного для погру ки количества порций, объем которых определяется расстоянием между сосе ними датчиками наполнения (если наж 25 та кнопка Порции) или от количест полных бункеров-дозаторов (если наж та кнопка Бункер).
В случае задания количества порц на выходе третьего элемента И по си налам с выхода шестого триггера 7, нажатой кнопке 45 Порция и сигнал от датчиков 31 наполнения вырабатыв ется сигнал, поступающий на второй вход шестого элемента ИЛИ 16.
Аналогично второй элемент И 9 вы дает сигнал, поступающий на первый вход шестого элемента ИЛИ 16, по си налу с выхода шестого триггера 7, п сигналам от верхнего датчика наполн ния и от нажатой кнопки 44 Бункер
Сигнал- с вькода шестого элемента ИЛИ. 16 поступает на второй выход счетчика 26 и уменьшает его содержи мое на 1.
Таким образом, по мере загрузки
30
35
40
При ЭТОМ сигнал от датчика 34 пос- бункера-дозатора и последующей его
тупает на вход четвертого элемента ИЛИ 14 и на вход десятого элемента И1Ш 20. В результате устанавливаются в нулевое состояние соответственно четвертый 5 и пятый 6 триггеры, что приводит к выключению привода 38 по входу перемещения вверх бункера-дозатора и к включению привода 35 на возврат датчика веса в рабочее положение.
Одновременно сигнал от датчика исходного состояния, задержанный пятым элементом 25 задержки на время, необходимое для полной остановки бункера ь процесс погрузки. Работа схемы управления при нажадозатора и возврата датчика веса в исходное рабочее состояние, поступает на второй вход первого элемента И 8. Однако сигнал на выходе первого элемента И 8 вырабатывается только в случае, когда тестой триггер 7 находится в единичном состоянии, что свидетельствует о необходимости продол ь процесс погрузки. Работа схемы управления при нажа0
тии кнопки 45 Порции не зависит от кратности количества заданных для погрузки порций груза числу порций, g способных поместиться в бункере-дозаторе .
Прекращение работы устройства в автоматическом режиме происходит следующим образом.
Продолжительность работы устрой . ства зависит от заданного для погруя- ки количества порций, объем которых определяется расстоянием между соседними датчиками наполнения (если нажа- 5 та кнопка Порции) или от количества полных бункеров-дозаторов (если нажата кнопка Бункер).
В случае задания количества порций . - на выходе третьего элемента И по сигналам с выхода шестого триггера 7, нажатой кнопке 45 Порция и сигналов от датчиков 31 наполнения вырабатывается сигнал, поступающий на второй вход шестого элемента ИЛИ 16.
Аналогично второй элемент И 9 выдает сигнал, поступающий на первый вход шестого элемента ИЛИ 16, по сигналу с выхода шестого триггера 7, по i сигналам от верхнего датчика наполнения и от нажатой кнопки 44 Бункер.
Сигнал- с вькода шестого элемента ИЛИ. 16 поступает на второй выход : счетчика 26 и уменьшает его содержимое на 1.
Таким образом, по мере загрузки
0
5
0
выгрузки, т.е. в процессе повторения циклов работы устройства, содержимое счетчика 26 уменьшается.
По завершении погрузки заданного
объема груза содержимое счетчика 26 становится равным нулю. В этом случае сигнал с соответствующего выхода дешифратора 27, свидетельствующий о выполнении заданной работы, устанавивает в нулевое состояние шестой триггер 7, сигнал с выхода которого блокирует прохождение сигналов через первый элемент И 8 и на продолжение работы устройства, после чего работя
устройства в автоматическом режиме прекращается.
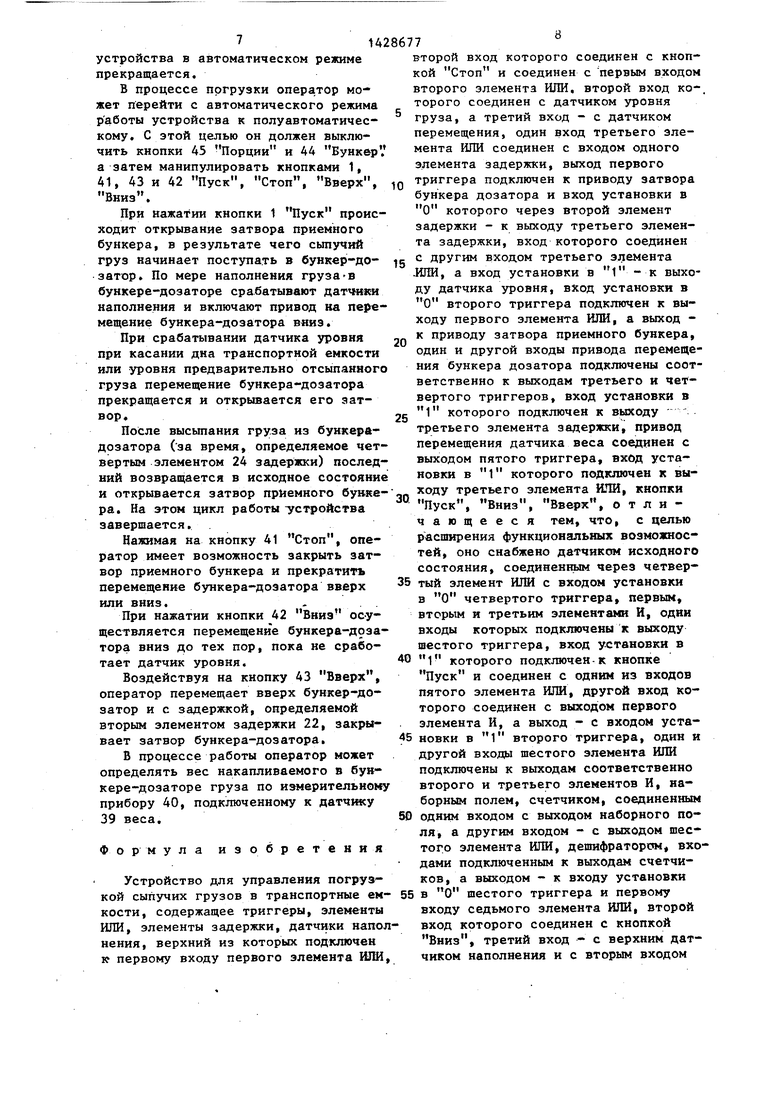
В процессе погрузки оператор может п ерейти с автоматического режима р аботы устройства к полуавтоматическому, С этой целью он должен выключить кнопки 45 Порции и 44 Бунк&р а затем манипулировать кнопками 1, 41, 43 и 42 Пуск, Стоп, Вверх, Вниз.
При нажатии кнопки 1 Пуск происходит открывание затвора приемного бункера, в результате чего сыпучий груз начинает поступать в бункер-дозатор. По мере наполнения груза-в бункере-дозаторе срабатывают датчики наполнения и включают привод на перемещение бункера-дозатора в«нз.
При срабатывании датчика уровня при касании дна транспортной емкости или уровня предварительно отсыпанного груза перемещение бункера-дозатора прекращается и открывается его эат- вор.
После высыпания груза из бункера- дозатора ( за время, определяемое четвертым элементом 24 задержки) последний возвращается в исходное состояние и открывается затвор приемного ра. На этом цикл работы устройства завершается.
Нажимая на кнопку 41 Стоп, оператор имеет возможность закрыть затвор приемного бункера и прекратить перемещение бункера-дозатора вверх или вниз.
При нажатии кнопки 42 Вниз осуществляется перемещени е бункера-дозатора вниз до тех пор, пока не сработает датчик уровня.
Воздействуя на кнопку 43 Вверх, оператор перемещает вверх бункер-дозатор и с задержкой, определяемой вторым элементом задержки 22, закрывает затвор бункера-дозатора.
В процессе работы оператор может определять вес накапливаемого в бункере-дозаторе груза по измерительному прибору 40, подключенному к датчику 39 веса.
Формула изобретения
Устройство для управления погрузкой сыпучих грузов в транспортные емкости, содержащее триггеры, элементы ИЛИ, элементы задержки, датчики наполнения, верхний из которых подключен R первому входу первого элемента ИЛИ
выход первого
к приводу затвора
5
0
5
0
второй вход которого соединен с кнопкой Стоп и соединен с первым входом второго элемента ИЛИ, второй вход ко-, торого соединен с датчиком уровня груза, а третий вход - с датчиком перемещения, один вход третьего элемента ИЛИ соединен с входом одного элемента Задержки, триггера подключен
бункера дозатора и вход установки в О которого через второй элемент задержки - к выходу третьего элемента задержки, вход которого соединен с другим входом третьего элемента ЛШ, а вход установки в 1 - к выходу датчика уровня, вход установки в О второго триггера подключен к выходу первого элемента ИЛИ, а выход - к приводу затвора приемного бункера, один и другой входы привода перемещения бункера дозатора подключены соответственно к выходам третьего и четвертого триггеров, вход установки в 1 которого подключен к выходу третьего элемента задержки, привод перемещения датчика веса соединен с выходом пятого триггера, вход установки в 1 которого подключен к выходу третьего элемента ИЛИ, кнопки Пуск, Вниз, Вверх, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено датчиком исходного состояния, соединенным через четвер5 тый элемент ИЛИ с входом установки в О четвертого триггера, первым, вторым и третьим элементами И, одни входы которых подключены к выходу шестого триггера, вход установки в
0 1 которого подключен-к кнопке Пуск и соединен с одним из входов пятого элемента ИЛИ, другой вход которого соединен с выходом первого элемента И, а выход - с входом уста5 новки в 1 второго триггера, один и другой входы шестого элемента ШШ подключены к выходам соответственно второго и третьего элементов И, наборным полем, счетчиком, соединенным одним входом с выходом наборного поля, а другим входом - с выходом шестого элемента ШШ, дешифратором, входами подключенным к выходам счетчиков, а выходом - к входу установки
5 в О шестого триггера и первому входу седьмого элемента ИЛИ, второй вход которого соединен с кнопкой Вниз, третий вход - с верхним датчиком наполнения и с вторым входом
0
9 1428677 О .
второго элемента И, а выходом черезключены к четвертому входу седьмого первый элемент задержки - с входом элемента ИЛИ и втхэрому входу третье- установки в 1 третьего триггера,го элемента И, третий вход которого датчик уровня через четвертый элемент соединен с верхним датчиком наполне- эадержки подключен к одному входуния, а четвертый вход - с кнопкой восьмого элемента ИЛИ, второй вход Порция, третий вход второго элемен- которого подключен к кнопке Вверх,та И подключен к кнопке Бункер, а выход - к второму входу третьегопричем выход десятого элемента ИЛИ элемента ИЛИ, датчиком исходного сое-io подключен к входам установки в О тояния, который через пятый элементтретьего и пятого триггеров, один задержки подключен к другому входувход - к выходу второго элемента первого элемента И, датчики наполне-ИЛИ, а второй вход - к датчику исход- ния через девятый элемент ИЛИ под-ного состояния.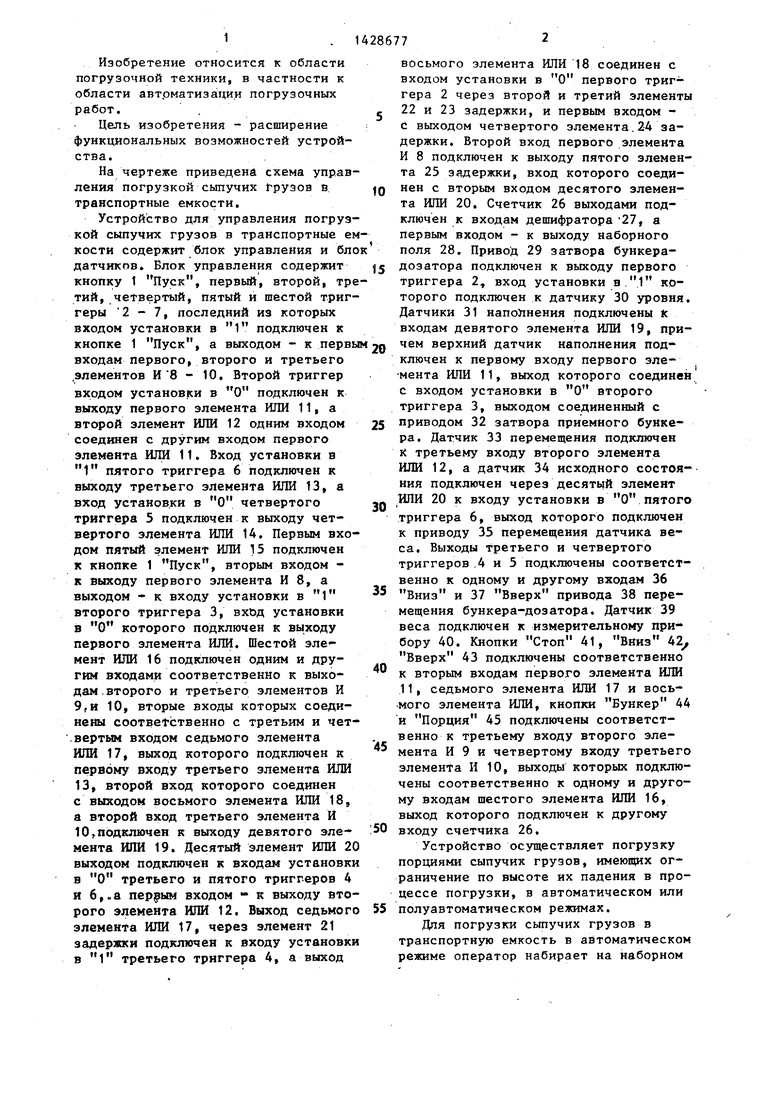

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дозированной погрузки сыпучих грузов в транспортные емкости | 1985 |
|
SU1234326A1 |
| Кормушка для рыб | 1980 |
|
SU942641A1 |
| Устройство для загрузки бункеров стекольной шихтой | 1990 |
|
SU1724553A1 |
| Устройство для управления дозатором | 1986 |
|
SU1413436A2 |
| Устройство управления дозатором | 1990 |
|
SU1791724A1 |
| Устройство для управления дозатором | 1985 |
|
SU1283537A1 |
| Устройство для дозирования сыпучих материалов | 1982 |
|
SU1115029A1 |
| Устройство управления дозатором | 1988 |
|
SU1606874A1 |
| Автоматический весовой порционный дозатор | 1985 |
|
SU1269105A1 |
| Система для контроля и управления автомобильно-экскаваторными комплексами | 1977 |
|
SU734725A1 |
Изобретение относится к погрузочной технике и касается автоматизации погрузочных работ. Цель изобрете.ния - расширение функциональных возможностей устройства. Для погрузки сьтучих грузов в транспортную емкость в автоматическом режиме оператор набирает на наборном поле 28 количество порций груза, подлежащего перемещению в транспортную емкость. Объем перемещаемого, груза может быть задан в виде количества порций, определяе- мых расстоянием между соседними датчиками наполнения, размещенными в бункере-дозаторе для ограничения высоты падения груза, или в виде количества полных бункеров-дозаторов. По сигналу от кнопки 1 Пуск включается привод 32 затвора приемного бункера и груз начинает поступать в бункер- дозатор. По мере наполнения грузом бункера-дозатора срабатывает нижний датчик 31 наполнения, сигнал от которого, приводит к включению привода 35 датчика веса, который отводится до упора бункера-дозатора и не мешает его перемещению. 1 ил. € (Л С ю 00 О5 
| Устройство для дозированной погрузки сыпучих грузов в транспортные емкости | 1985 |
|
SU1234326A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
