N
СО
о ю
О)
ел
Изобретение относится к машиностроению, а именно к манипуляторам, обеспечивающим механизацию и автоматизацию технологических процессов обработки деталей.
Целью изобретения является повышение надежности и расширение технологических возможностей за счет создания дополнительных усилий, ориентирующих и удерживающих деталь в схвате, и обеспечение возможности вращения детали в схвато.
На чертеже изображен схват, общий вид.
Схват содержит корпус 1, в котором с возможностью поворота от штока 2 силового цилиндра (не показан) установлены губки 3. Кроме того, он содержит установленные вдоль оси схвата и расположенные между его губками электрическую обмотку 4 с сердечником 5, закрепленным на корпусе 1, обойму 6, установленную на сердечнике 5, и пневматическую присоску 7, расположенную внутри обоймы 6 с возможностью вращения и продольного регулировочного перемещения. Сердечник 5, губки 3 и обойма 6 выполнены из ферромагнитного материала и образуют магнитную цепь с воздушным зазором между обоймой и рабочей поверхностью губок.
Схват работает следующим образом.
Для захвата детали схват подводится к зоне загрузки и обмотка 4 подключается к источнику питания. В результате этого происходит притягивание детали к одной из губок 3 со стороны ее рабочей поверхности, так как при протекании магнитного потока в магнитной цепи схвата возникают пары
0
0
5
0
полюсов, один из которых расположен на губке 3, а другой - на обойме 6. Происходит сведение губок 3 и совмещение оси захваченной детали с осью схвата. Далее схват перемещается вниз, а присоска 7 соединяется с источником,вакуума, что приводит к закреплению детали в схвате пневматически присоской 7 и механически губками 3. После подачи детали в зону обработки, например накатки резьбы, губки 3 разжимаются и деталь при обработке вращается вместе с присоской 7.
Формула изобретения
Схват манипулятора, содержащий установленные в корпусе с возможностью поворота губки, связанные со штоком силового цилиндра, отличающийся тем, что, с целью повыщения надежности и расширения технологических возможностей за счет создания дополнительных усилий, ориентирующих и удерживающих деталь в схвате, и обеспечения возможности вращения детали в схвате, он снабжен установленными вдоль оси схвата и расположенными между его губками электрической обмоткой с сердечником, закрепленным на корпусе, обоймой, установленной на сердечнике, и пневматической присоской, расположенной внутри обоймы с возможностью вращения и продольного регулировочного перемещения, при этом сердечник, губки и обойма выполнены из ферромагнитного материала и образуют магнитную цепь с воздушным зазором между обоймой и рабочей поверхностью губок.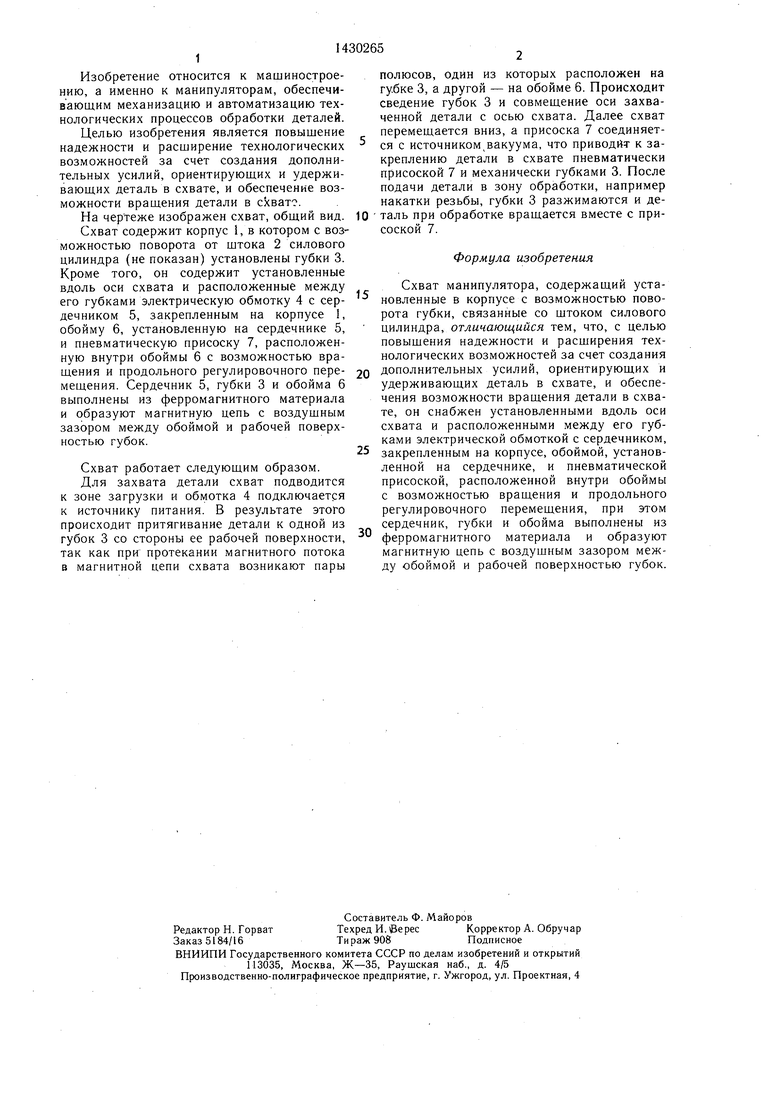
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1984 |
|
SU1283090A1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| Автоматический многозахватный манипулятор | 1990 |
|
SU1731626A1 |
| Схват манипулятора | 1981 |
|
SU982901A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2374064C1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Электромагнитный схват | 1990 |
|
SU1798187A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Манипулятор | 1974 |
|
SU547336A1 |
Изобретение относится к области машиностроения, а именно к манипуляторам, обеспечивающим механизацию и автоматизацию технологических процессов обработки деталей. Целью изобретения является повышение надежности и расширение дополнительных усилий, ориентирующих и удерживающих деталь в схвате, и обеспечение возможности вращения детали в схвате. Для захвата детали схват подводится к зоне загрузки и обмотка 4 подключается к источнику питания, что приводит к притягиванию детали к одной из губок 3 схвата со стороны ее рабочей поверхности, так как в магнитной цепи схвата, образованной сердечником 5, обоймой 6 и губками 3, возникают пары полюсов, один из которых расположен на обойме, а другой - на губке. При сведении губок 3 происходит совмещение оси детали с осью схвата. Затем при опускании схвата и соединении присоски 7 с вакуумом осуществляется пневматический захват детали. После подачи детали в зону обработки, например накатки резьбы, губки 3 разжимаются и деталь вращается вместе с присоской 7. 1 ил. о
| Схват манипулятора | 1977 |
|
SU623734A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
