о
(Л

| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Автоматический многозахватный манипулятор | 1990 |
|
SU1731626A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Промышленный робот | 1986 |
|
SU1509244A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
Изобретение относится к робототехнике, а точнее к манипуляторам, предназначенным для работы в вакуумных камерах, например в электронной промышленности. Целью изобретения является расширение технологических возможностей за счет обеспечения работы в вакууме и повышение производительности за счет снижения массы руки. В процессе работы манипулятора происходит поворот руки в одну из заданных позиций, где механические передачи привода выдвижения руки, ее вертикального перемещения и привода губок схвата 26 входят в зацепление с соответствующими им двигателями 23, закрепленными на основании 20 и отделенными герметично от вакуумной камеры 2 посредством магнитных муфт 21. Сцепление двигателей 23 с соответствующими механическими передачами приводов происходит при помещении планок 29 в паз 14 вилки 13, закрепленной на ведомой части магнитной муфты 21. 7 ил.
Фиг. J
ел
;о
05
со Np
GO
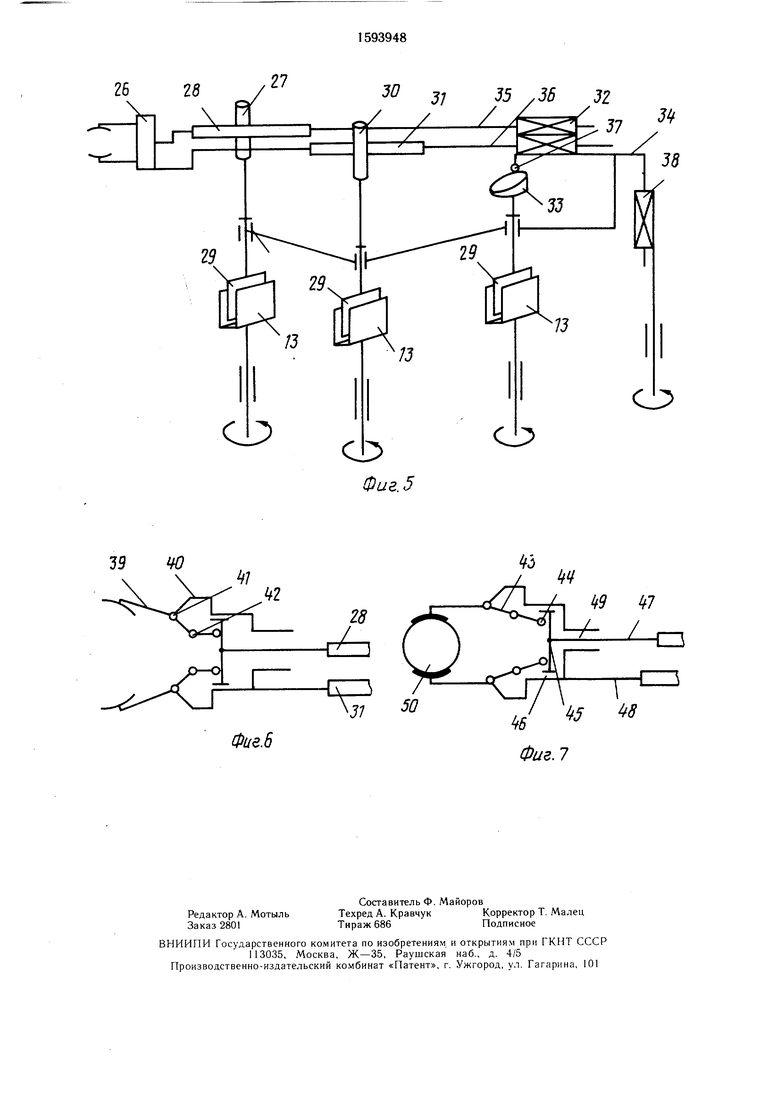
манипулятора. Подшипники, в которых вращаются валы, связанные с планками 29, закреплены на корпусе 34. Рейки 28 и 31 соединены со стержнями 35 и 36, которые входят в подшипники 32. С кулачком 33 контактирует шарик 37. Рука манипулятора установлена в поступательном подшипнике 38. Схват имеет губки 39, закрепленные в корпусе 40 в подшипниках 41. С помошью подшипников 42, тяг 43, подИзобретение относится к робототехнике, в частности манипуляторам, предназначенным для работы в вакуумных камерах, например в электронной промышленности.
Целью изобретения является расширение технологических возможностей за счет обеспечения возможности работы в вакууме и повышение производительности за счет снижения массы руки.
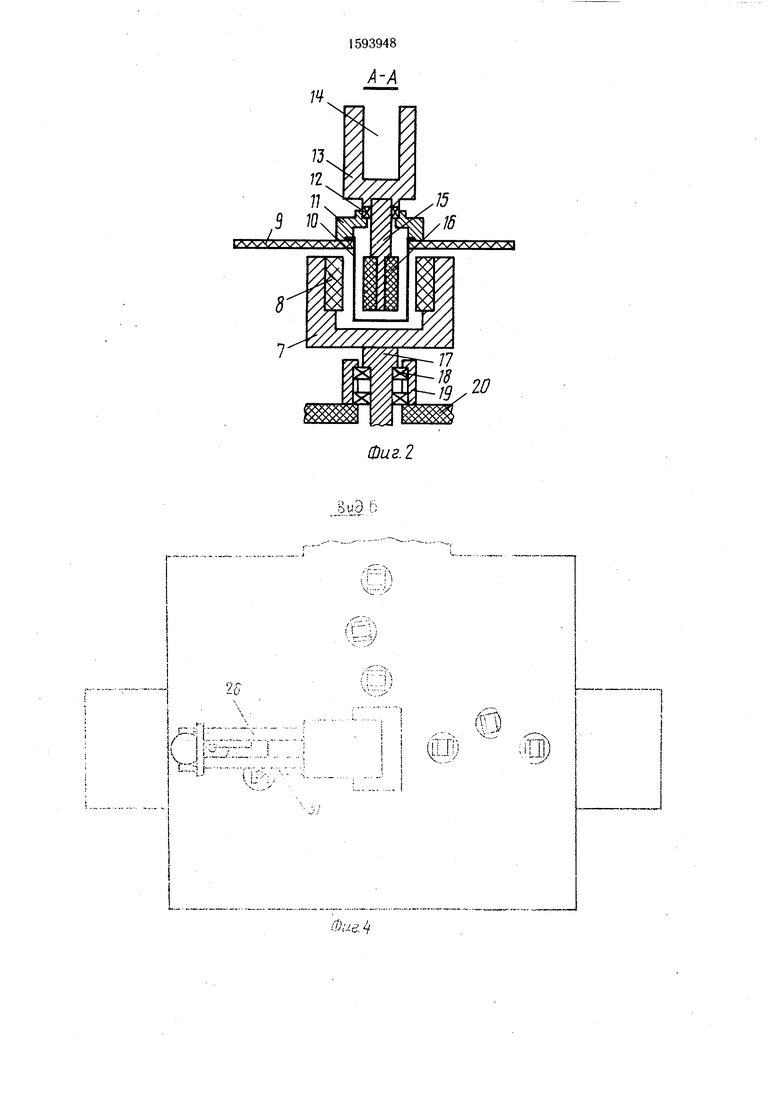
На фиг. 1 изображена вакуумная камера без руки манипулятора; на фиг. 2-10 шипников 44 губки соединены со вкла- сечение А-А на фиг. 1; на фиг. 3 - мани- дышем 45, который в подшипнике 46 уста- пулятор в вакуумной камере; на фиг. 4 -новлен в корпусе 40. К вкладышу присоевид Б на фиг. 3; на фиг. 5 - кинема- динен шток 47 от рейки 28, а к кор- тическая схема манипулятора; на фиг. 6 -пусу - шток 48 от рейки 31. Шток 47
схват манипулятора в раскрытом состоянии; установлен в корпусе 40 в поступательном подшипнике 49. Позицией 50 обозначена захватываемая пластина.
Технологический процесс плазменного напыления кремниевых пластин состоит из следующих этапов: помещение пластин в
чае рабочее пространство манипулятора со- 20 шлюз 1 внешним загрузчиком, шлюзование держит шлюз 1, вакуумную камеру 2 с реак-пластины,перемещение пластины из шлюза 1
тором 3 и выходной шлюз 4. В камере 2 в реактор 3, напыление пластины с помощью имеются девять гнезд 5, в которых уста-плазмы в реакторе, перемещение пластины
новлены магнитные муфты с элементамииз реактора в шлюз 4, шлюзование и
разъемного соединения на ведомых частях, вывод пластины из шлюза или передача
на фиг. 7 - схват с зажатой кремневой пластинкой.
Устройство и работа манипулятора поясняются на примере его использования для обработки кремниевых пластин. В этом слуи центральное гнездо 6 с магнитной муфтой, к ведомой части которой крепится рука манипулятора. Ведущая часть каждой из муфт содержит обойму 7 с магнитами 8. На платформе 9 вакуумной камеры закреппластины далее в -другую вакуумную камеру по технологической цепочке.
При позиционировании манипулятора у каждой из трех технологических позиций 1, 3, 4, где установлены по три гнезда 5,
лены перегородки 10, имеющие форму ста- зо происходит вход пластин 29 в паз 14 вил- кана и герметично отделяющие ведомуюки 13. Для этого все вилки 13 соотчасть от ведущей. В обойме 11 в под-ветствующим образом ориентированы с помощью датчиков положения, входящих в состав двигателей 23. После этой ориенторый установлен в подшипниках 18, расположенных в обойме 19, закрепленной на основании 20 камеры. Магнитная муфта в сборе обозначена позицией 21. Платформа 9 и основание 20 установлены на подставках 22. На основании 20 закреплены двигатели 23 приводов руки манипулятора. Кремниевые необработанные пластины помещаются на входной стол 24 и после обработки в плазтации и вхождения пластин 29 в пазы
руки манипулятора
40
шипнике 12 установлен элемент разъемного соединения, представляющий собой вилку 13 с пазом 14, которая сидит на валу 15, несущем магниты 16 ведомой части муфт. 35 3, т. е. соединения пластин 29 с Обойма 7 укреплена на валу 17, ко-двигателями, манипулятор готов к работе.
Перемещение схвата 26 возможно по трем координатам, при этом двигатели 23 герметично отделены от перегородками 10.
Первый двигатель вращает кулачок, с которым контактирует щарик 37. Поскольку кулачок профилирован, при его вращении происходит перемещение шарика 38 по вертикали, так как шарик связан с
менном реакторе 3 помещаются на выходной 5 1 орпусом 34, перемещающимся в подшип- стол 25, далее пластина перемещается другимнике 38. Вместе с корпусом перемещаются
манипулятором (не показан).вверх-вниз и рука со штоками 47 и 48,
Манипулятор имеет также схват 26, пер-рейками 28 и 31, стержнями 35 и 36 и подвый зубчатый валик 27, находящийся в шипниками 32. При этом контакт между зацеплении с первой зубчатой рейкой 28,рейками 28, 31 и зубчатыми валиками 27
при этом валик установлен в подшипнике 50 нарушается, они постоянно нахо- и связан с планкой 29, входящей при дятся в зацеплении, при перемещении схва- позиционировании в паз 14 вилки 13. Па-та вверх-вниз валики 27 и 30 просто
раллельно первому зубчатому валику уста-скользят по зубьям реек 31 и 28 вверхновлен второй зубчатый валик 30 с план-вниз. Другие два привода предназначены
кой 29, находящийся в зацеплении с второй Для перемещения (выдвижения) руки и обес- зубчатой рейкой 31, при этом обе рейки 55 печения функционирования схвата. Так, при установлены в подшипнике 32. С третьей одновременном синхронном движении при- планкой 29 соединен кулачок 33, посредст-водов валики 27 и 30, вращаясь в завом которого осуществляется подъем руки цеплении с рейками 28 и 31, одновреманипулятора. Подшипники, в которых вращаются валы, связанные с планками 29, закреплены на корпусе 34. Рейки 28 и 31 соединены со стержнями 35 и 36, которые входят в подшипники 32. С кулачком 33 контактирует шарик 37. Рука манипулятора установлена в поступательном подшипнике 38. Схват имеет губки 39, закрепленные в корпусе 40 в подшипниках 41. С помошью подшипников 42, тяг 43, подшипников 44 губки соединены со вкла- дышем 45, который в подшипнике 46 уста- новлен в корпусе 40. К вкладышу присое вывод пластины из шлюза или передача
пластины далее в -другую вакуумную камеру по технологической цепочке.
При позиционировании манипулятора у каждой из трех технологических позиций 1, 3, 4, где установлены по три гнезда 5,
тации и вхождения пластин 29 в пазы
3, т. е. соединения пластин 29 с двигателями, манипулятор готов к работе.
руки манипулятора
6 возможно по трем двигатели 23 гермеменно перемещают схват 26 на выдвижение или вдвижение. Стержни 35 и 36 перемещаются поступательно в подщипниках 32. Для раскрытия или закрытия схвата достаточно несинхронного движения приводов, например, запаздывания в движении одного из штоков относительно другого. Например, если рейка 31 неподвижна, то рейка 28 со щтоком 47 движется вправо (фиг. 6 и 7). Шток 47 перемещает в подщипнике 46 вкладыщ 45 с подщипниками 44.
Через тяги 43 и подшипники 41 движение щтока передается на губки 39, закрепленные в корпусе 40, в результате этого схват закрывается (фиг. 7) и зажимает пластину 50. Затем при синхронном перемещении реек происходит вдвижение руки со схватом 26 и зажатой деталью. Затем руки поворачиваются на новую позицию, например, у реактора 3, рука выдвигается, опускается, происходит раскрытие схвата при несинхронном перемещении щто- ков 47 и 48, но уже в противоположном направлении, чем при захвате.
Дальнейшее перемещение пластины от реактора 3 к шлюзу 4 происходит аналогично изложенному. Кроме того, возмо- жен и перевод руки сразу с позиции щлюза 1 на позицию шлюза 4.
L.
Формула изобретения
Манипулятор, содержащий установленную на основании руку с приводом ее поворота, приводы губок схвата и выдвижения руки, включающие две зубчато- реечные передачи, рейка одной из которых связана с корпусом схвата, а рейка другой - со щтоком, щарнирно связанным с губками схвата, отличающийся тем, что,
с целью расщирения технологических возможностей путем обеспечения работы в вакууме и повышения производительности за счет снижения массы руки, он снабжен приводом подъема руки, планками и магнитными муфтами с вилками на их ведомых частях, при этом приводы выдвижения и подъема руки, а также привод губок схвата выполнены многодвигательными с количеством двигателей в каждом из них, равным числу точек позиционирования руки при повороте, причем все двигатели закреплены на основании и их валы связаны с ведущими частями соответствующих магнитных муфт, а на входных валах передач всех приводов закреплены планки, расположенные с возможностью их пооче- ре дного взаимодействия с вилками соответствующих муфт.
ч jp.........j. .
U ; --,--.- -, -
i ;,, : ,
го
Фиг.2
ю
пТТП VU.J.;
26
28
27
CJ)
7
e
W
j;
J5 .36 32
C
«S 7
| Промышленный робот | 1987 |
|
SU1437216A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
