13
СД
.з
iч
сектороп, Coccfio с ; смс)П Иро-- нан:)( кулачки 9 и 10 j с ксггорьми в.аикод а ист Б уют ролики 12 к U . ус т а нов-- лсьпгые иа осях 14 и 15, Г1осле,гд1-гие загсреплепь на сателлнтэ 3, С ателлкты 3 { I 4 соелннень меяуггу собой двумя чегырь хявенникаьш., которые с;одер:1мт
17
Ш я
in
голаря зтпму кпутяпии момент ш- щего сателлита : лередае ся и j)acnpe- ,г1еляется на рторой сателлит -, , сга- жаатся нагрузка на зацепление. На це-ггральном колесе 2 суммируется качатс;льксе дпикег-гие сателлитов и ву)ашение нолила 7. 1 с, и 8 з,п, ф-лы, 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод ремизоподъемной каретки для ткацкого станка | 1978 |
|
SU1337446A1 |
| Ремизоподъемная каретка для ткацкого станка | 1979 |
|
SU1285083A1 |
| ПРИВОД РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ ТКАЦКОГО СТАНКА | 1990 |
|
RU2009282C1 |
| Привод ремизоподъемной каретки ткацкого станка | 1976 |
|
SU787500A2 |
| Педальный привод (варианты) | 2016 |
|
RU2651314C1 |
| Ремизоподъемная каретка для ткацкого станка | 1978 |
|
SU739143A1 |
| МАГНИТНЫЙ РЕДУКТОР | 2013 |
|
RU2545509C2 |
| ПРИВОД РЕМИЗНЫХ РАМ РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ | 2000 |
|
RU2167964C1 |
| Планетарно-кривошипный механизм возвратно-поступательного движения | 1983 |
|
SU1130711A1 |
| Ремизоподъемная каретка ткацкого станка | 1979 |
|
SU1079706A1 |
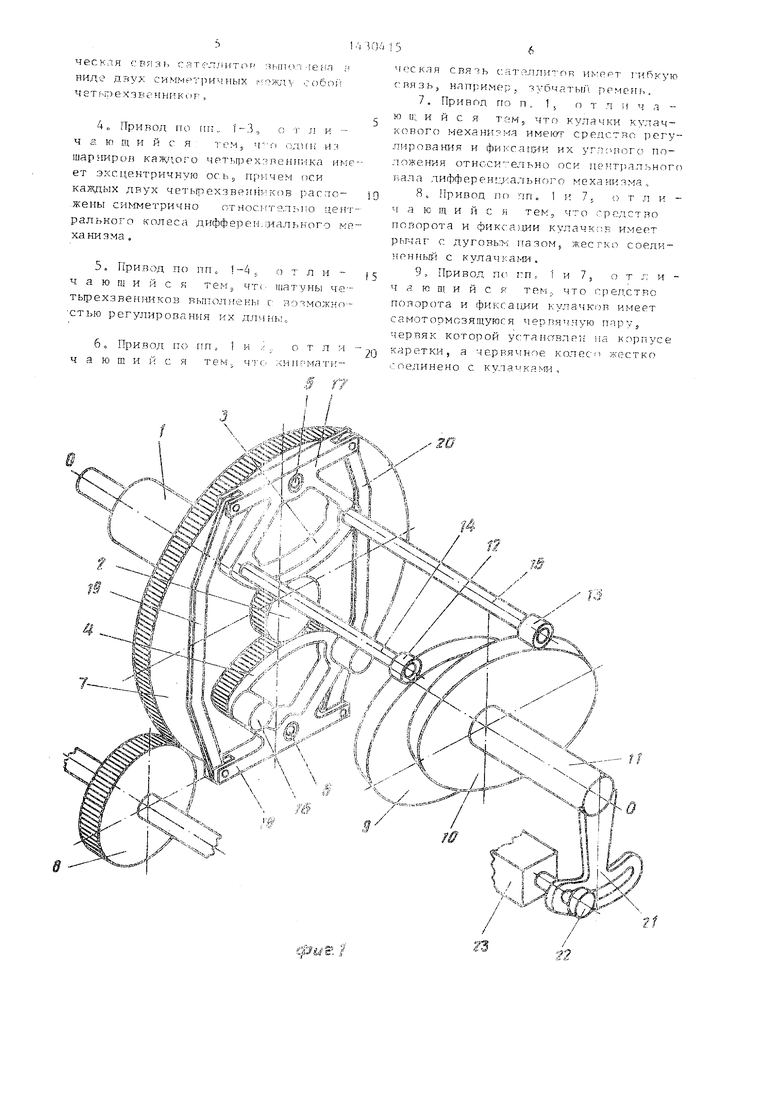

Изобретение позволяет повысить скчфостные возможности работы каретки Прив11д содер;кит установленное на rnanHON валу 1 каретки центральное ; ольцо 2 дифференцт-тального механизма. Гюследнее находится в зацеплении с сате-плита гл 3 и 4 , оси 5 и 6 которых закреплень; на зодиле 7, находярдемся в зацеплен1- И с шестерней 8, Сателлиты 3 и -4 выполнены в виде зубчатых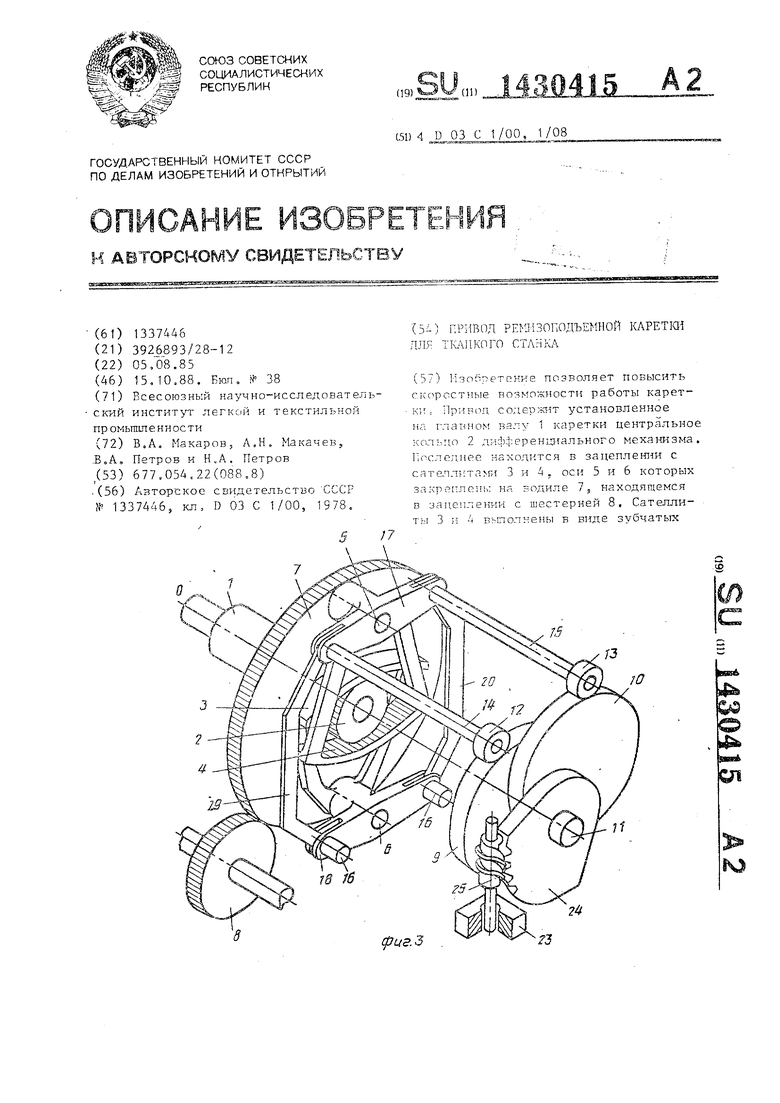
Изооратение относитсл иому напз-;ностроеик;о и гр для использозам-ffj на сс м -13опод ь€:мных кар8 ках ков о
Цргп., изобретения - по
pC CTHbiX ЯОЗ;- ОЖИОСТеЙ ПУ
вращения Щ1к.пической ра i привода J
На фит „ 1 дан обгций э с двумя саталлитами:; я,: то же / с тремя сателлмТ,. вариант гфиг-ода с влутр. лениек сателлитоВз ка с:трук;г -:я гиарняра ч; ть;|зе;-ч фи.д. 5 - конструкь1 -я pj) длкле тяги,.
На главком вг лу 1 кар закраглеко (или лысолгга;; 1де;1траль -:ое коласо 2 ного механийма дривода , 3 Зсцапленик с сателлит ; следки:е выполнены в Bt-i,ii; секторов с нар;/жны -: (ф,: внутренним задеплевием 1 дягдах на осях 5 и 6, кот женк симметрично отноСйЧ 0-0 даитральногс колеса сате.ллитов закреплены и,; которое др е,дс7 авллет соб с м о нт и р о 3 а н и у ю с в с i б од к -о и находя1дуюся F зацепде)-; ней 8, Послед;{яя хиле1ча aapia с главным тка (не показан),
С о ос но с над ом 1 с BIJ Р егулкрованкя по упгу от оси 0-0 смонтированы F; к реткн кулачок 9 и контрк кмею;ттиа общую ступиду t 1 9 к KOHTDK .аачког; Ч в-:а
ч.-i , на фиг , гДуИ;/ зацеп- ;.|. -
3 зен тика; н У :ир
жестко с заодно; ipapei-ifiHajib - (- ахол;ящаеоя № 3 и 4, ik : у5чатд Х 1 :, 2) иди
орыЕ рас дол ;узьнС оси 2.. Оси 5 и
я од и л е 5 ой Г сстерню
ИЕУ с шестео кдесли сзя- цкого С ганк
3i,iOKROCT bjO
носит ел tiHo орпусе ка. у; I а ч о к 10 . , С к:улачко ;1:ч(.дейстЕуиТ
L-оответстЕенно ролики 12 и 13, уота- oвдeннь e на осях 1 ; и |3, Последние закр ла одном из сатс длитов, .-например 3, Чсобы оба ике-- пи одинаковый момент относи- гйпьно осей 5 и -5 човорота; на са- геллите 4 закреплены грузы t6, За- дплит 3 жестко связан и;1и выиолнен зй одно целое с симметричным двуплечим xopoKbJCHoM 17.. Таким же с. бразом соединен сатетслит ч с идеьт )ЧНЬп-1 ;;обой, Тяги ;9 Соединены с ;-иечами ко- 8, Таким образом, са-женил и фикса дли кудачкоя 9 и 10 предуснотренс сдеикальное устройство; которое в пер.ом Бариа--те 4crioj:HeHH содержит рычаг 21 ; ec iKC закреплен- ный на студиде ычаг 21 имс(;т иаз,,, }3 которь й яходит ииьг /2, :. с га- ::о1зле}шьЕЙ в ко рпя се 33, .Здя тон же деди MCOIC-T быть также ис; одь зована с мото :1мозя 1:аяся гср мяч ная
дара, червячн ое KOj:eco 24 кглд.рг) за 1среплека ка стуг Иие 1 ку.к5 ч гчтв, л червяк 25 уст;-ноялеи и корчу( с -а- ретки 23, пчлч;„ ;ии pci вания и фиксаиии кудачк-оа - ;дрименяться кпс чмсчзый яажи -i.. тановки и одре;дсденкя угла ч кого доворота 9 и . дида 11 может бьдь с абжеча i указапгдем; шкала копией с
ится на кордусе каретки.
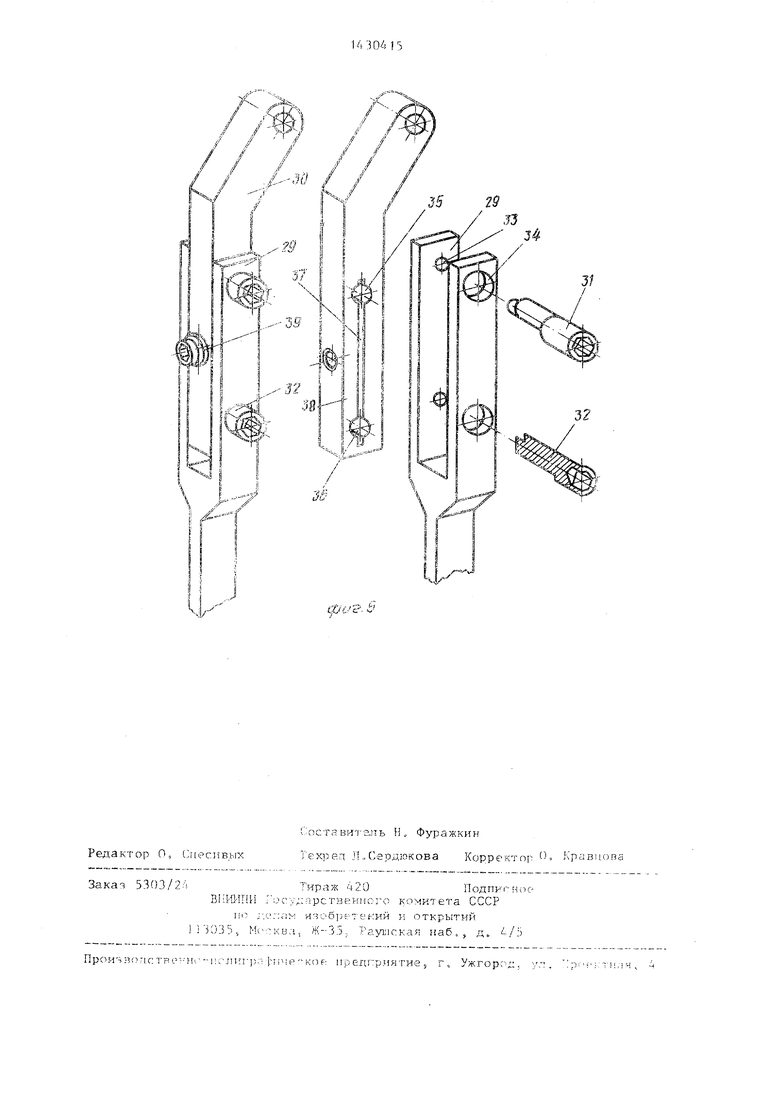
Одно из шао Hi-ipHj-ix сос:и ч;и ги 19 (и тяги 2Г)) о) ч
ось 26 (27) - фиг. Д, которая фикс ; - руется от попорота клеммой 28. Тяги 19 и 20 могут быть выполнены из двух планок 29 и 30, соединенных эксцент- ричныьз- ося№ 31 и 32, Планка 29 имее паз для размеп1ения планки 30 и кон- це} тричнь е отверстия 33 и лля установки эксцентричных осей 31 и 32. Планка 30 имеет отверстия 35 и 36 для тех же осей, соединенные продольным пазом 37, образу огдим клемму 38. Для затяжки служит винт 39.
На фиг, 2 показан вариант выполнения привода S со7 ержащего три сатс-ит- лита АО-42, расположенных симметри чно относительгю оси (0-0) центрального колеса 2„ Каи-утьй сателлит выполнен в виде зубчатого сектора 43 жестко соединенного или выполненного за одно целое с зубчат -1М шкивом 44. Последний в данно - примере выполнен также в вид сектора,
На из сателлитоЛ; 1-апри :ер 40,, закреплен -. оси 14 и 15 с соот; ет- ствуюисими ро.гика..и1 12, 13, а на цкух других сателлитах 41 и 42 усганозлены грузы для создания papiisix моментов ине1эид-; 1 у всех сателлитов, Сатоллить: 40-42 соеди ены один с другиг- зубча- тьгм ремне -; 45. который впаимодейству- ет со шкива -г -1 44,
Пр;1вод ре изс-по;1ъемной каретки
Вг;а1:(ение от главного вала ста1;ка через 11:пс: епню 8 привода каретки передается на водило 7. которое вращается вместе с осями 5 и 6, а значит и с ус1 анокле1П1Ы:-П1 на ь:их сателлитами 3 и 4. Последние приводят } движение центральное зубчатое колесо 2 и ради- ки 12 и 13, смокт ированные на осях 14 и 15, закреплен1д,Х на сателлитах. Ролики 12 и 13 обегают просЬили с о ответ- стБуюг гнх кулачков 9 и 10. И кулачки, воздействуя на ролики, а через и на сателлиты 3 и 4, сообгцают последним качательное движение относительно их осей. Данное .движение и вращение водила 7 суммируется на центральном колесе 2, Последнее получает движе гие изменение скорости которого определяется проф Идем кудач; а 9 и контр- кулачкЕ 10
Благодаря тому, что сателлит 3 связан с сателлитом 4 с помощью четы- рехзвенников 5 имеющих элемент 17-20, крутящий момент от ведущего сателлита 3 передается и распределяется на вто
5
0
5
poi i сателлит 4, Лля С1беспечения рлвно- eгнocти распределения силового потока на все сателлиты при монтаже механизма с по оп1ью эксцентричных осей 26 и 27 выбираются возможные зазоры во всей кинематической цепи, чеь . обеспе -гивается повьш1ение несущей способ;;ости передачи.
При выпаднении осей 26 и 27 концентричными следует применять тяги переменной длины, состоящие из планок 29 и 30, При этом для регулировки механизма ослабляют клeм ioвoe соеди- не-гие 38 эксцентричных осей 31 и 32, 1 твора 1П -:вая винт 39. Затем поворотом occj i 31 и 32 смещают планки 29 и 30 по отнои;е -гию одна к другой, соответ- стпенно уменыиая или увеличивая длину тяг 19 и 20, После выборки зазоров ; ь .еханизме фиксируют длину тяг 19 и 20, затяг вая винты 39 клеммовых соединений 38„
Для настройки привода при его :-.О:;та7-;е поворот кулачков производится изменением положеютя рычага 21 с блокировкой его винтом 22 или поворотом -;ервяка 25, Использоваюте са- мстормозя; 1ейся червячной пары 24-25 позволяет проводить регулировку во время работы привода. Работа привода каретки с тремя сателлитами практически не отличается от работы ука- зан1{ого вариан.та,
Пре;;лагаемый привод ремизоподъемной каретки позволяет повысить скоростные возможности и облегчить наладку и обслуживаете ткацких станко-в.
Ф о р м у л а
обретения
5
0
5
1,Привод ремизоподъемной каретки для ткацкого станка по авт. св.
N 13374465 отличающийся тем, что, с цалью повышения его скоростных возможностей путем предотвращения ци сдической разбалансировки, он по меньшей мере один допол- нительньш, вьшолненный в виде сектора сателлит, при этом все сателлиты установлены симметрично относительно оси центрального колеса диффepeнтц - ального механизма и кинематически связаны между собой.
2,Привод поп, 1, отличаю- ш, и и с я тем, что сателлиты выполнены с 3y6bH№i наружного зацепления.
3,Привод по пп. 1 и 2, о т л и чающийся тем, что кинемати10
71
сриг.
. i
