Изобретение относится к области рбототехники и может бь ть использовано при создании манипуляторов, работающих в экстремальных средах.
Цель изобретения - повьшение точности устройства за счет исключения астатической системы управления.
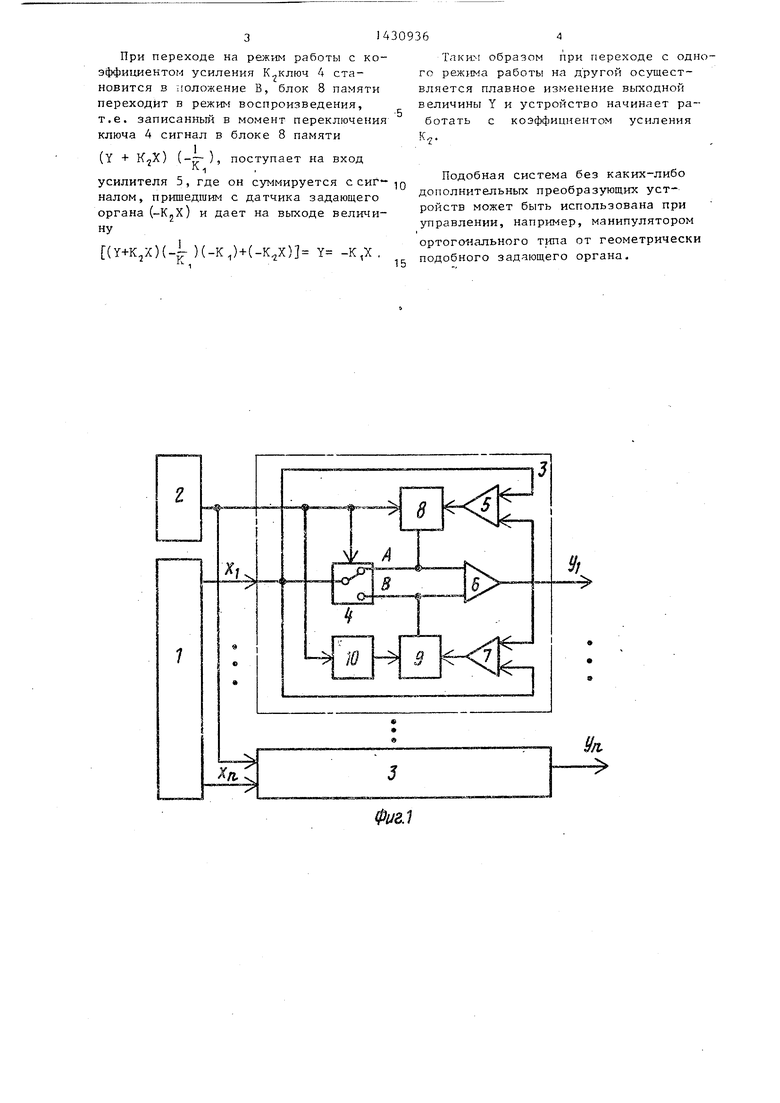
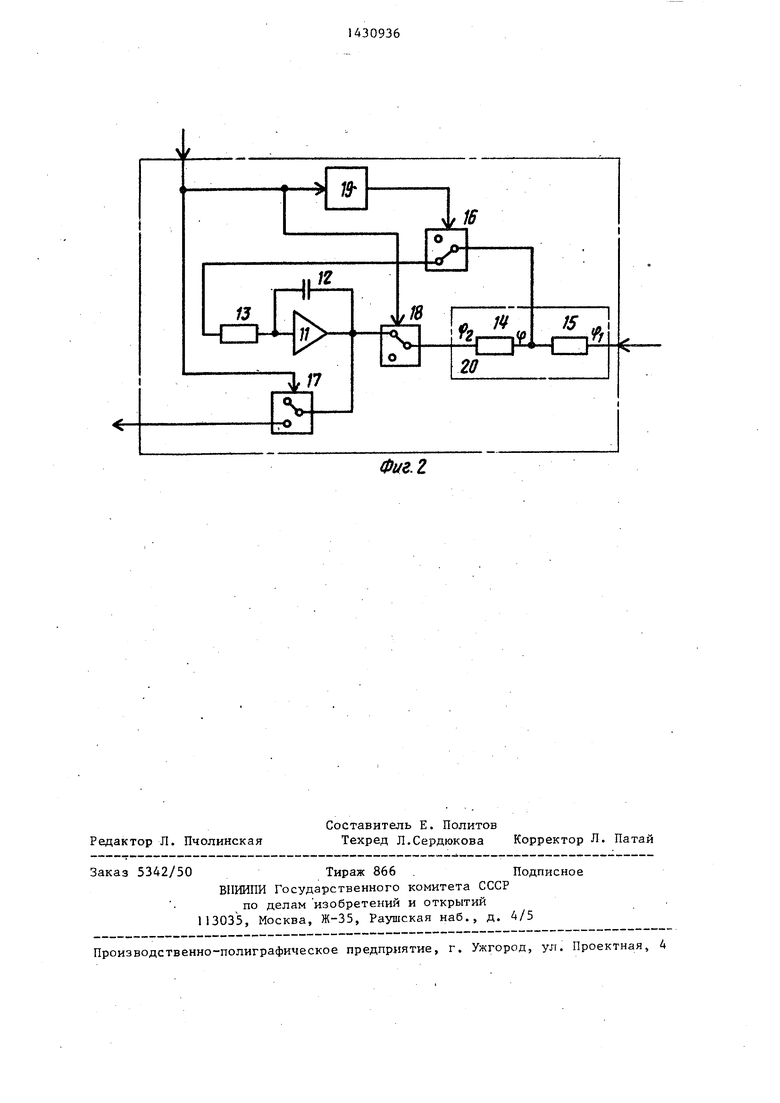
На фиг, 1 показана функциональная схема устройства; на фиг, 2 - функциональная схема блока памяти.
Устройство содержит задающий орган 1, задатчик 2 управляющих сигналов, блоки 3 преобразования управ- ляющих сигналов, первый ключ 4, первый 5, второй 6 и третий 7 усилители первый 8 и второй 9 блоки памяти соответственно, первый элемент НЕ 10, X и Y на фиг, 1 обозначают входные и выходные сигналы блоков 3 преобразования управляющих сигналов.
Блок памяти состоит из интегратора 11, конденсатора 12, резисторов 13-15, второго 16, третьего 17 и чет вертого 18 ключей, второго элемента НЕ 19, делителя 20 напряжения, ( и
if на фиг, 2 обозначают потенциалы делителя 20 напряжения.
Устройство ра,ботает следующим об- разом.
Устройство работает в двух режимах: режим с максимальным коэффициентом усиления входного сигнала К, и режим с минимальным коэффициентом усиления Кл. .
Обеспечивающие мнемоничность работы блоки 8 и 9 памяти работают поочередно в режиме слежения, либо в режиме воспроизведения записанного сиг нала,
В слежения (фиг. 2) потенциал q , поступает на .правое плечо делителя 20,.В то же время на левое плечо подается потенциал if с выхода интегратора 11, Тогда потенциал средней точки делителя определяется вы- ражением
Cf, R , +
Кк+к,ь
где R
13
R .- сопротивление соответствую 14
щих плеч делителя 20, При замкнутом ключе 17 потенциал средней точки подается на вход интег ратора 11 через резистор 13 и начинает его заряжать до тех пор, пока потенциал cf не станет равным нулю, В
этом случае, как следует из предыдущего выражения
14
+ 1 R;
R
О,
т. е,
4-1
д
5 0
5
0
5
0
5
0
5
Это отзюшение определяет так называемый коэффициент усиления блоков 8 и 9 памяти, кроме того, потенциал Ц ,, имеет по отношению к потенциалу cf, противоположный знак, так как кроме усиления входного сигнала, осуществляется его инвертирование,
В режиме воспроизведения записанного сигнала ключ 17 отключает среднюю точку делителя 20 от входа интегратора 11, а ключ 18 - от ключа делителя 20, ключ 16 замыкается и подает потенциал с выхода интегратора 11 на один из входов усилителя 5,
При работе системы с коэффициентом усиления входного сигнала К ключ 4 находится в положении А, блок 8 памяти работает в режиме слежения, блок 9 памяти - в режиме воспроизведения записанного сигнала. Входной сигнал X с датчика задающего органа I через Ключ 4 поступает на соответствующий вход операционного усилителя 5, где он усиливается по напряжению в К раз и, меняя знак, поступает на вход исполнительного органа, Одновременно на усилители 6 и 7 поступает входной сигнал X и сигнал с выхода усилителя 5, Y ,
8усилителях 6 и 7 происходит алге- раическое суммирование входных сигналов X и Y с учетом коэффициентов усиления усилителей 6 и 7, на выходе усилителя 6 образуется сигнал + Y.
а на выходе усилителя 7 - сигнал К,X + Y, Первьй из них поступает в блок 8 памяти, в котором накапливается сигнал
(Y + ) (---} .
1 1 где г- - коэффициент усиления блока 8
л,
памяти.
Второй сигнал поступает в блок 9 памяти .
и момент включения системы напряжение на выходе интегратора 1 1 блока
9памяти равно нулю, следовательно, с выхода блока 9 памяти че сигнал ка усилитель 5.
При переходе на режим работы с коэффициентом усиления А становится в 1 оложение В, блок 8 памяти переходит в режим воспроизведения, т.е. записанньй в момент переключения ключа 4 сигнал в блоке 8 памяти
(Y + ) (--), поступает на вход
1
усилителя 5, где он суммируется ссиг налом, пришедшим с датчика задающего органа (-KjX) и дает на выходе величину
(Y+K.,X)(-- )(-К,) + () Y -К,Х ,
образом при переходе с одного работы на другой осуществляется плавное изменение выходной величины Y и устройство начинает работать с коэффициентом усиления К,.
Подобная система без каких-либо дополнительных преобразующих устройств может быть использована при управлении, например, манипулятором ортогонального типа от геометрически подобного задающего органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой измерительный неуравновешанный мост | 1978 |
|
SU789767A1 |
| Аналого-цифровой интегратор | 1978 |
|
SU805345A1 |
| Устройство для цифровой записи-воспроизведения цифровой информации | 1990 |
|
SU1788521A1 |
| Устройство для приема дискретной информации | 1987 |
|
SU1501298A1 |
| Аналоговое запоминающее устройство | 1979 |
|
SU765882A1 |
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| Дискретный интегратор | 1975 |
|
SU705468A1 |
Фиг. I
| Устройство для позиционно-скоростного управления манипулятором | 1981 |
|
SU991366A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Манипулятор | 1974 |
|
SU561656A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
