«
(Л
со со со со
Изобретение относится к области ма- I шиностроения, а именно к схватам роботов и манипуляторов, и может быть ис- |нользовано при загрузке, разгрузке техно- Алогического оборудования. : Целью изобретения является повышение i надежности захвата изделий путем сниже- |ния динамических нагрузок на схват.
На фиг. 1 изображен общий вид схва- та; на фиг. 2 - разрез А-А на фиг. 1. Схват содержит корпус I, рычаги 2, несущие с одного конца зажимные ролики 3, с другого - опорные ролики 4 с упругим кольцо.м 5, конус 6, связанный с ijjTOKOM силового цилиндра 7, шарниры 8, регулируемые упоры 9, пружины 10 и II. Ролик 4 выполнен с ручьем 12, в ко- гором установлено кольцо 5. Кольцо 5 может быть изготовлено, например, из полиуретана. Площадь сечения ручья 12 равна 1лощади сечения кольца.
Схват работает следующим образом. При подаче рабочей среды в полость цилиндра шток силового цилиндра 7 с конусом 6 движется влево, копус 6 давит па )юльца 5 опорных роликов 4. Рычаги 2, поворачиваясь в шарнирах 8, обхваты,- ают заготовку 13 зажимными ролика.ми 3. ри смещении оси схвата относительно си заготовки 13 происходит дожим зажим- роликов 3 левого и правого рычагов 2 До заготовки 13 за счет деформации |;ольца 5 опорного ролика 4. В то же
время осуществляется и зажим заготовки. При вращении заготовки 13 в зажимных роликах 3 погрешность геометрической формы заготовки компенсируется упругими кольцами 5 опорных роликов 4. При прекращении подачи рабочей среды в полость цилиндра вся система под действием пружин 10, II приходит в исходное положение.
Схват позволит автоматизировать процесс удаления заготовок при их отрезке
на технологическом оборудовании при вращающемся щпинделе, например, при отрезке трубного проката на трубоотрезном станке.
15
Формула изобретения
5
Схват манипулятора, содержащий губки в виде двуплечих рычагов, щарнирно установленные в корпусе и несущие с одного конца опорные ролики, а с другого - 0 зажимные ролики, кинематически связанные с элементом привода - конусом силового цилиндра, отличающийся тем, что, с целью повышения надежности захвата изделий путем снижения динамических нагрузок на схват, каждый из опорных роликов снабжен упругим элементом, выполненным в виде кольца, расположенного на его периферии, при этом опорный ролик выполнен с ручьем, в котором расположено кольцо, а площадь сечения кольца равна площади сечения ручья ролика.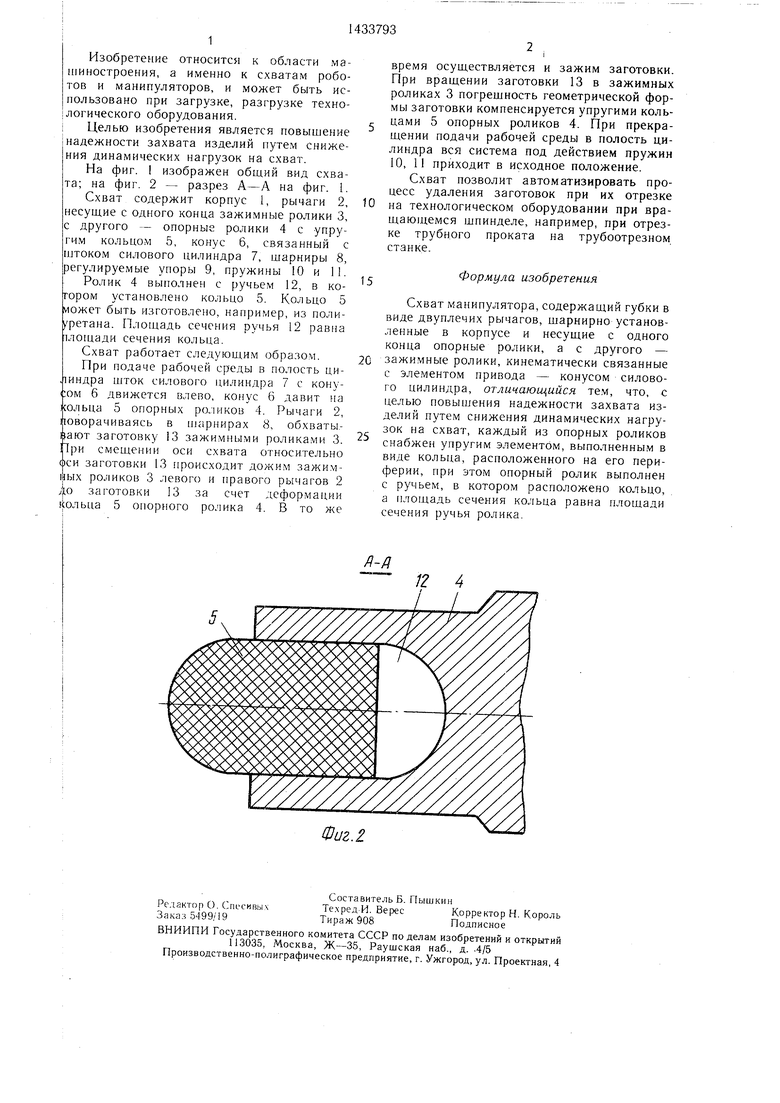
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1220793A1 |
| Захват манипулятора | 1983 |
|
SU1134276A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2024388C1 |
| Схват манипулятора | 1988 |
|
SU1585146A1 |
| Схват манипулятора | 1981 |
|
SU1030156A1 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
| Роботизированный технологический комплекс | 1987 |
|
SU1465264A1 |
| Автоматизированный пресс для объемной горячей штамповки заготовок | 1989 |
|
SU1804943A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано для загрузки и разгрузки технологического оборудования при вращающемся шпинделе. Цель изобретенияповышение надежности захвата изделия путем снижения дина.мических нагрузок на схват. Схват состоит из корпуса I, рычагов 2, зажимных роликов 3, опорных роликов 4 с упругим кольцом, штока 7 силового цилиндра, регулируемого упора 9. При смещении оси схвата относительно оси заготовки 13 происходит дожим зажимных роликов 3 левого и правого рычагов 2 до заготовки за счет деформации кольца опорного ролика 4. В то же время осуществляется и зажи.м заготовки. 2 ил.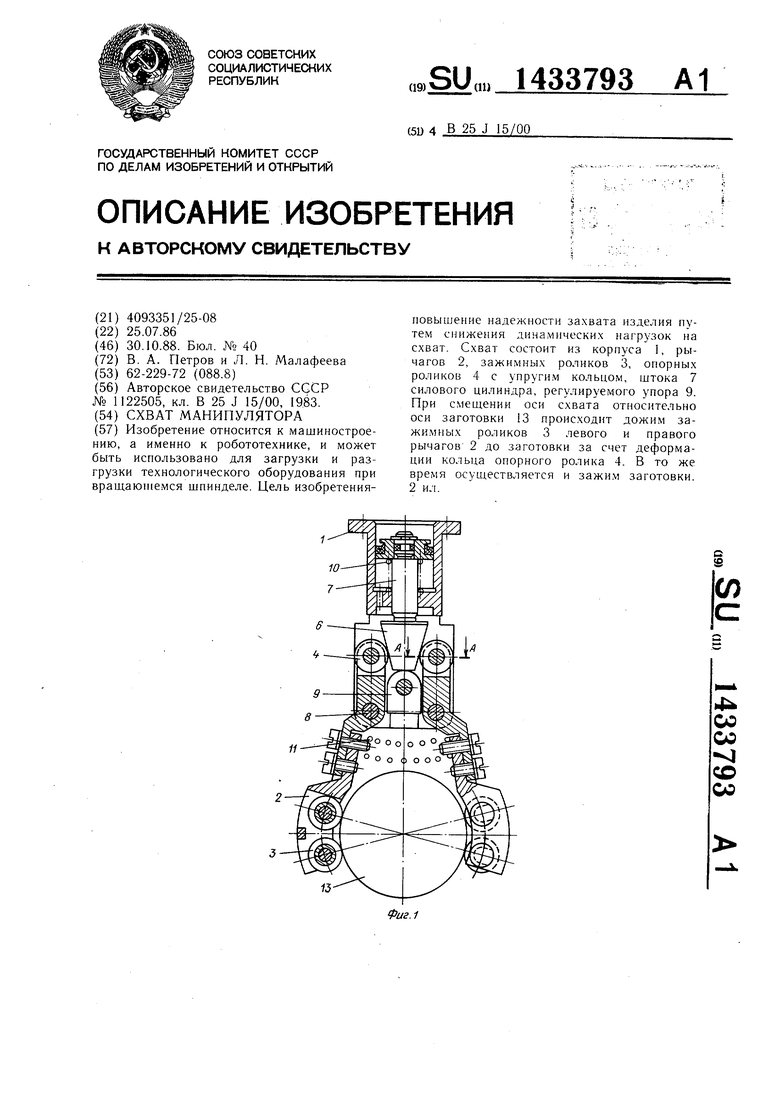
Фиг.2.
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
