сл
4ik
оо со со
Изобретение относится к области vta- 1ииностроения и может быть использоано в-захватных устройствах роботов-манипуляторов.
Целью изобретения является расширение функциональных возможностей схвата манипулятора путем специальной конструкции захватных губок и введения перемещаемого их привода.
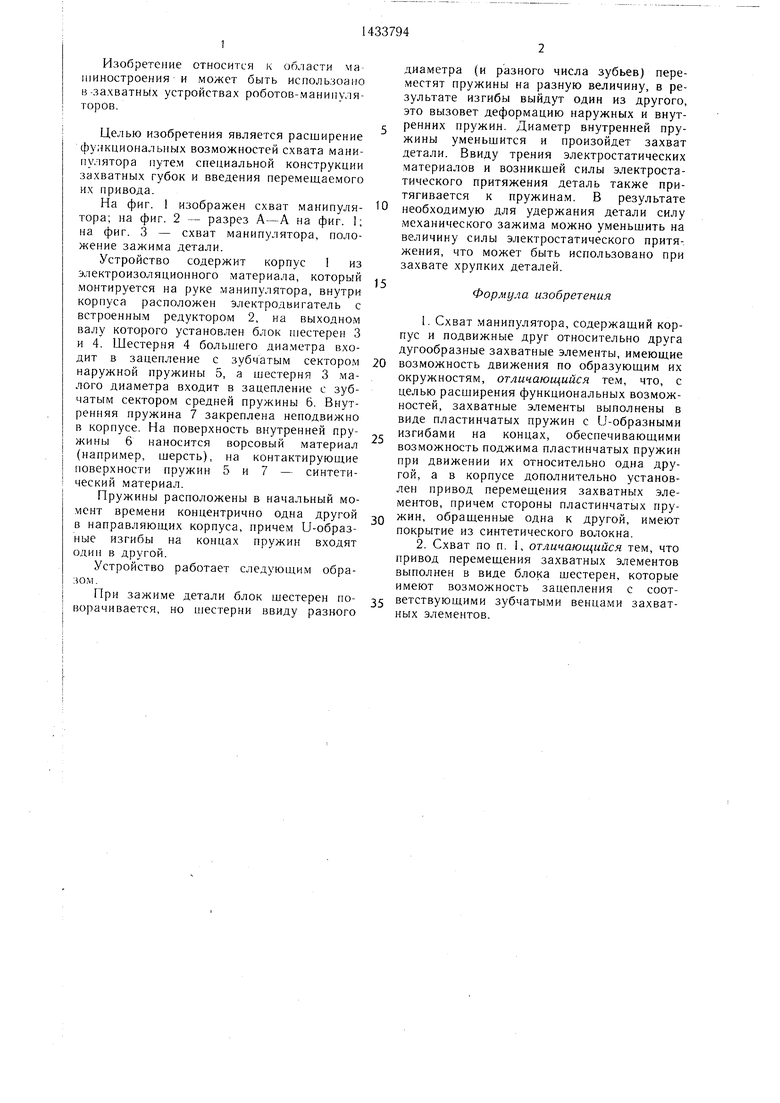
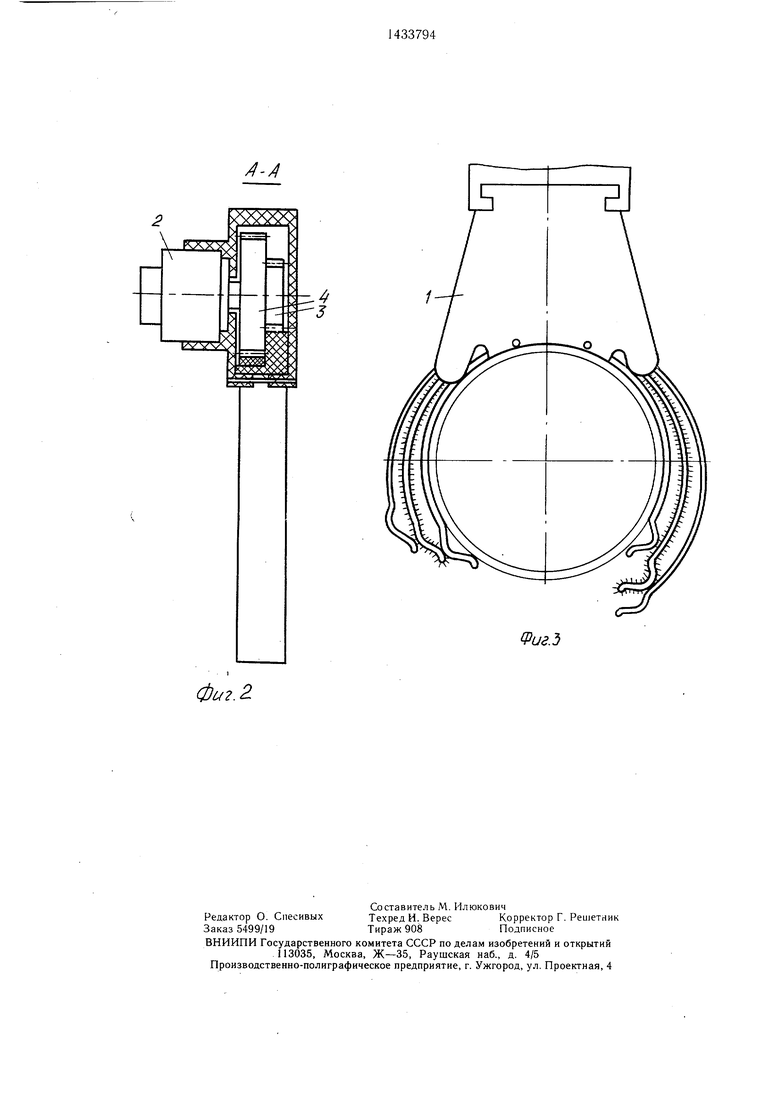
На фиг. 1 изображен схват манипулятора; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - схват манипулятора, положение зажима детали.
Устройство содержит корпус 1 из электроизоляционного материала, который Монтируется на руке манипулятора, внутри корпуса расположен электродвигатель с встроенным редуктором 2, на выходном валу которого установлен блок шестерен 3 и 4. Шестерня 4 большего диа.метра входит в зацепление с зубчатым сектором наружной пружины 5, а шестерня 3 малого диаметра входит в зацепление с зубчатым секторо.м средней пружины 6. Внутренняя пружина 7 закреплена неподвижно в корпусе. На поверхность внутренней пру- жины 6 наносится ворсовый материал (например, шерсть), на контактирующие поверхности пружин 5 и 7 - синтети- ческий материал.
Пружины расположены в начальный момент времени концентрично одна другой в направляющих корпуса, причем U-образ- ные изгибы на концах пружин входят один в другой.
Устройство работает следующим обра- зом.
При зажиме детали блок шестерен по- ворачивается, но шестерни ввиду разного
диаметра (и разного числа зубьев) переместят пружины на разную величину, в результате изгибы выйдут один из другого, это вызовет деформацию наружных и внут- г ренних пружин. Диаметр внутренней пружины уменьшится и произойдет захват детали. Ввиду трения электростатических материалов и возникшей силы электростатического притяжения деталь также притягивается к пружинам. В результате 0 необходимую для удержания детали силу механического зажима можно уменьшить на величину силы электростатического притяжения, что может быть использовано при захвате хрупких деталей.
Формула изобретения
1.Схват манипулятора, содержащий корпус и подвижные друг относительно друга дугообразные захватные элементы, имеющие
0 возможность движения по образующим их окружностям, отличающийся тем, что, с целью расширения функциональных возможностей, захватные элементы выполнены в виде пластинчатых пружин с U-образными изгибами на концах, обеспечивающими возможность поджима пластинчатых пружин при движении их относительно одна другой, а в корпусе дополнительно установлен привод перемещения захватных элементов, причем стороны пластинчатых пру0 жин, обращенные одна к другой, имеют покрытие из синтетического волокна.
2.Схват по п. I, отличающийся тем, что привод перемещения захватных элементов выполнен в виде блока шестерен, которые имеют возможность зацепления с соот5 ветствующими зубчатыми венцами захватных элементов.
5
//
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1798182A1 |
| Схват промышленного робота | 1985 |
|
SU1324846A1 |
| Захватное устройство | 1988 |
|
SU1521584A1 |
| Захватное устройство | 1987 |
|
SU1530437A1 |
| Схват промышленного робота | 1986 |
|
SU1328193A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Схват манипулятора | 1986 |
|
SU1366393A1 |
| Захватное устройство манипулятора | 2018 |
|
RU2700348C1 |
Изобретение относится к машиностроению и может быть использовано в захватных устройствах роботов-манипуляторов. Целью изобретения является расширение функциональных возможностей схвата манипулятора. Устройство содержит корпус 1 и пластинчатые пружины 5, 6, 7. Привод, размещенный в корпусе 1, выполнен в виде шестерен 3, 4, входящих в зацепление с зубцами, выполненными на пружинах 5, 7. Стороны пружин 5, 6, 7, обращенные одна к другой, имеют покрытие из синтетического волокна. При повороте шестерен пружины 5 и 7 поворачиваются в противоположные стороны. Внутренняя пружина 7 прижимается к центру за счет взаимного давления 1.:-образных изгибов на концах пружин. За счет трения синтетических покрытий пружин 5, 6, 7 возникает также сила электростатического притяжения. Для освобождения детали пружины 5, 7 с помошью привода поворачиваются в исходное положение. 1 з.п. ф-лы, 3 ил.
Фи2.2.
| Патент США № 3986745, кл | |||
| ДИФФЕРЕНЦИАЛЬНАЯ ТЕРМИОННАЯ ЛАМПА | 1920 |
|
SU294A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
