Изобретение OTIIOCHTCH к машиио- строеиию, в частности к захватным головкам манипуляторов, и может быть использовано д,пя автоматизации тех- яолог ических процессов производства деталей типа тел вращения; в том -гисле на роботизированных участках . токарной обработки.
Цель изобретения - расктирение технологических возможностей схвата за счет применения подпружиненных постоянных магнитов и магнитопрово- Установлергных на подпружиненной планке, что позволяет захватывать детали, обработанные заподлицо с ку- na4Ka,vrn патрона токарного станка.
Иа фиг. показан охват промьшшек ного робота, общий вид; на фиг, 2 - разрез А-А на фиг.1 {исходное положение); на фиг.З - то }ке (.захват маг-20 ремещаясь вместе с зубчатой рейкой
китами детали, обрггботанной заподлицо с кулачкам патрона токарного станка}; на фиг, 4 - то же (захват деталиJ торец которой выступает за. кулачки патрона токарного станка).
Схват промышленного робота содержит корпус I5 зажимные кулачки 2j перемещающиеся по направляющим 3 и связанные с приводом, ВЕ)1полнен- в виде пневмопоршкя 4 с зубчатой рейкой 5, входящей в зацепление с шестернями 6, взаимодействугаидачи с ).МгШ№ет кулачками„ Б пазах 7 корпуса установлены с , возможностью перемещения магниты 8j подхгрулсиненные прула;нами 9, Схват содерлдат такэке планку iOj ,окиценную пр г/кинами i1j на которой жестко закреплены магш-1топрово,сц)1 12 взаимодействующие одной стороной с магш-;;тамы 8; а другой - с захватываемой деталью 13 и палец 4, взаимодействую1д.ий с за- еимю.ми кулачками. При этом д Iaмeтp пальца меньше самого малого диаметра захватываемой детали,
С:яаат работает следующим образом.
В исходном положении зажимные кулачки 2 разведены, пневмопоршень 4 11аходится в крайнем нижнем положении шшкка 10 с маг1-штопроводами 12 и пальцем 14 под действием пружин 11 нaxo лгIтcя на таком расстоянии от магнитов 8,. что усилие прит.чжения магнитного потока в этот момент минимально т.е. магниты 8 и магнитопр водь 12 практически не взаимодействуют друг с другом ().
Рассматривают два варианта работы схвата.
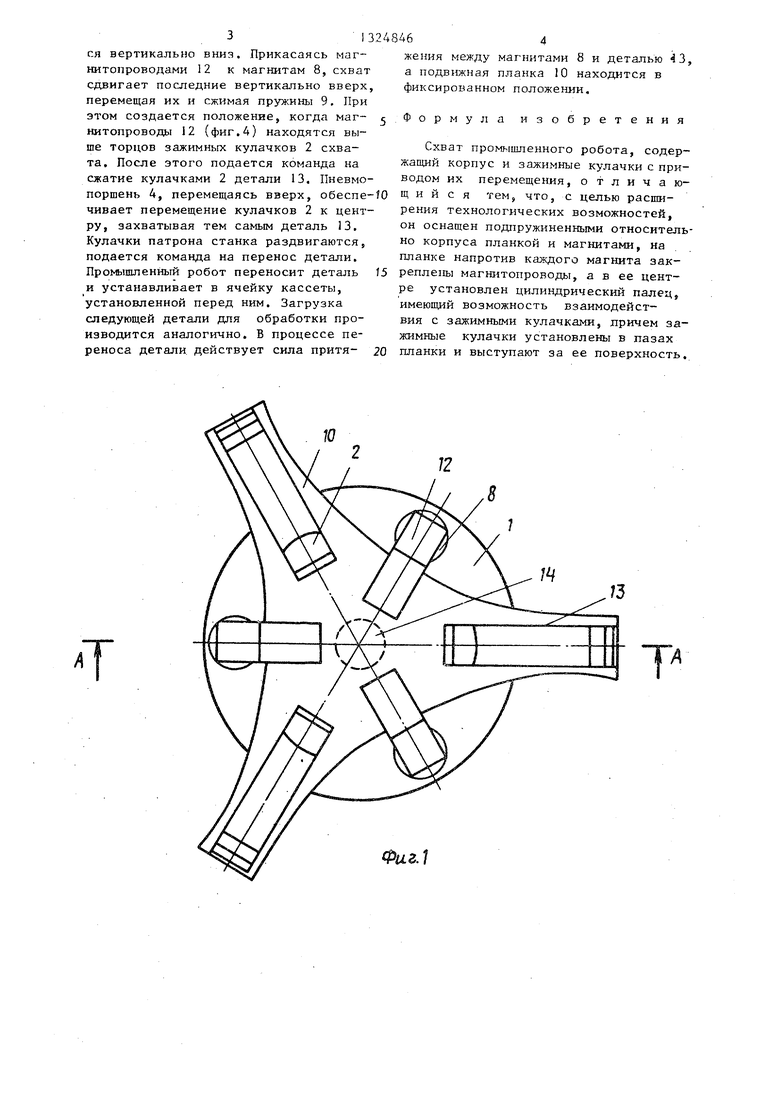
Первый вариант, когда захватывается обработанная дeтaJ;lь, торцы которой, зажатые трехкулачковым зажимным патроном станка, оказываются заподлицо с торцом патрона станка (.фит .З). После подачи команды на захват детали схват промышленного робота опускается,, приближается к детали 13 ( вертик;шьно вниз) и прижимается к ней магнитопроводами 12. При этом планка 10 перемещается вверх, сжимая прудсины 1 1 д,о соприкосновения магнитопроводов 12 с магнитами 8. В этот момент подается команда на останов схвата и на включение привода. Подается сжатый воздух в одну из полостей ппевмопоршня 4, он, пе0
5 вверх, приводит во вращение проме- жуточ 1ые шестерни 6, которые через зубчатое зацепление перемещают за- лшмные кулачки 2 к центру, а именно
5 к пальцу 14. В результате обжатия последнего заяшмными кулачками 2 подвижная планка 0 с магкитопроводя ми 12 не возвращается обратно под действием сил растяжения лружин 11, и, таким образом, фиксируется в поло- жекии, когда возникают силы притяжения между магнитами 8 и деталью 13. Кулачки патрона станка раздвигаются, Далее подается команда на перенос де5 тали 13 из зоны обработки станка в ячейку кассеты (не показана). После подачи команды на разжатие зажимных кулачков 2 пневмопоршень 4 под действием сжатого воздуха перемещается вниз, кулачки 2 раздвигаются, палец 14 освобождается, под;зижная планка 10 с магнитопроводами 2 под действием пружин 11 отрывается от магни0
тов 8, образуя между магнитами магнитопроводов воздушньм зазор в В результате усилие притяжения детали 13 к магнитам 8 падает до минимума, деталь 13 освобождается от схвата. Загрузка следующей детали производится аналогично,
Второй вариант, когда захватывается деталь, торцы которой отстоят от торцов зажимного патрона станка, После подачи команды иа захват детали схват перемещается вертикально вниз. При этом подвижная планка 10, сжимая пружины 1, вместе с магнитопроводами 12 и пальцем 14 перемещает313
ся вертикально вниз. Прикасаясь маг- нитопроводами 12 к магнитам 8, схват сдвигает последние вертикально вверх, перемещая их и сжимая пружины 9, При этом создается положение, когда маг нитопроводы 12 (фиг.4) находятся вы ше торцов зажимных кулачков 2 схва- та. После этого подается команда на сжатие кулачками 2 детали 13, Пневмо- поршень 4, перемещаясь вверх, обеспечивает перемещение кулачков 2 к центру, захватывая тем самым деталь 13. Кулачки патрона станка раздвигаются, подается команда на перенос детали. Промышленный робот переносит деталь и устанавливает в ячейку кассеты, установленной перед ним. Загрузка следующей детали для обработки производится аналогично. В процессе переноса детали действует сила притя-
464
жения между магнитами 8 и детапью 43, а подвижная планка 10 находится в фиксированном положении,
Формула изобретения
Схват промншленного робота, содержащий корпус и зажимные кулачки с приводом их перемещения, отличающийся тем, что, с целью расширения технологических возможностей, он оснащен подпружиненными относительно корпуса планкой и магнитами, на планке напротив каждого магнита закреплены магнитопроводы, а в ее центре установлен цилиндрический палец, имеющий возможность взаимодействия с зажимными кулачками, причем зажимные кулачки установлены в пазах планки и выступают за ее поверхность.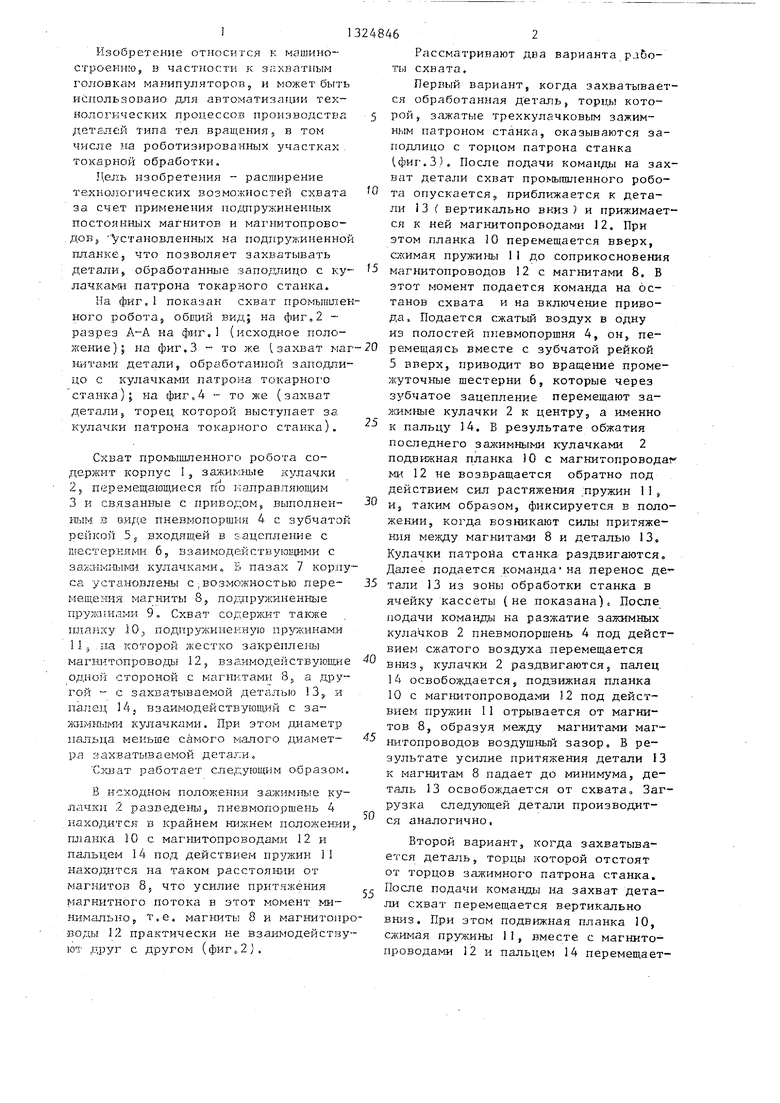
| название | год | авторы | номер документа |
|---|---|---|---|
| Зажимное устройство для токарного станка | 1983 |
|
SU1127696A1 |
| Самоцентрирующийся патрон | 1985 |
|
SU1273216A1 |
| Схват | 1987 |
|
SU1511114A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Токарный патрон | 1991 |
|
SU1816547A1 |
| Схват промышленного робота | 1987 |
|
SU1516349A1 |
| СХВАТ ДЛЯ ТОНКОСТЕННЫХ ДЕТАЛЕЙ | 2003 |
|
RU2253563C2 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Схват робота | 1982 |
|
SU1024271A1 |
| СПОСОБ КРЕПЛЕНИЯ ЗАГОТОВКИ ПРИ ТОКАРНОЙ ОБРАБОТКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2201847C2 |
Изобретение относится к машиностроению, в частности к захватным головкам манипуляторов, и.может быть использовано на роботизированных участках токарной обработки. Цель изобретения-расширить технологические возможности схвата за счет применения подпружиненных относительно корпуса схвата планки и магнитов, что позволяет захватывать детали, обработанные заподлицо с кулачками патрона станка. Для этого в пазах 7 корпуса установлены с возможностью перемеще-г кия магниты 8, подпружиненные пружи - нами 9. Схват содержит также планку 10, подпружиненную пружинами 1i, на которой жестко закреплены магннтопро- воды 12, взаимодействующие одной стороной с магнитами 8, а другой - с захватываемой деталью 13, и палец 14, взаимодействующий с зажимными кулач-, ками 2. Причем зажимные кулачки установлены в пазах планки и выступают за ее поверхность. 4 ил. (Л 00 i4 : Щ Фиг. 2
А
т
12
3
т
А
Фиг. 7
Кулачок I патрона станка
...„..
.3
А-А
Кулачок патрона станка
Редактор И.Горная
Составитель С.Грибов Техред И,Попович
Заказ 3003/13 Тираж 952Подписное
БШИШ Государственного комитета-СССР
по делам изобретений и открытий 113035, Москва, Ж-ЗЗ, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
ФигМ
Корректор А.Ильин
| Ансеров М.А | |||
| Зажимные приспособления для токарных и круглошлифовальных станков | |||
| - М.-Л.: Государственное -научно-техническое издательство машиностроительной литературы | |||
| Станок для изготовления деревянных ниточных катушек | 1925 |
|
SU1948A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
